Open X-Embodiment数据集下载方式
分享一种开放数据集Open X-Embodiment的下载方法
找到一种开放数据集Open X-Embodiment的下载方法。
1. 打开Open X-Embodiment项目链接:Open X-Embodiment: Robotic Learning Datasets and RT-X Models
2. 找到数据集表格链接:Open X-Embodiment Dataset Overview - Google 表格
3. 下图链接中的Open_X_Embodiment_Datasets.ipynb文件显示的运行结果中(末尾处)可以看到数据集在gs文件系统中的位置及大小
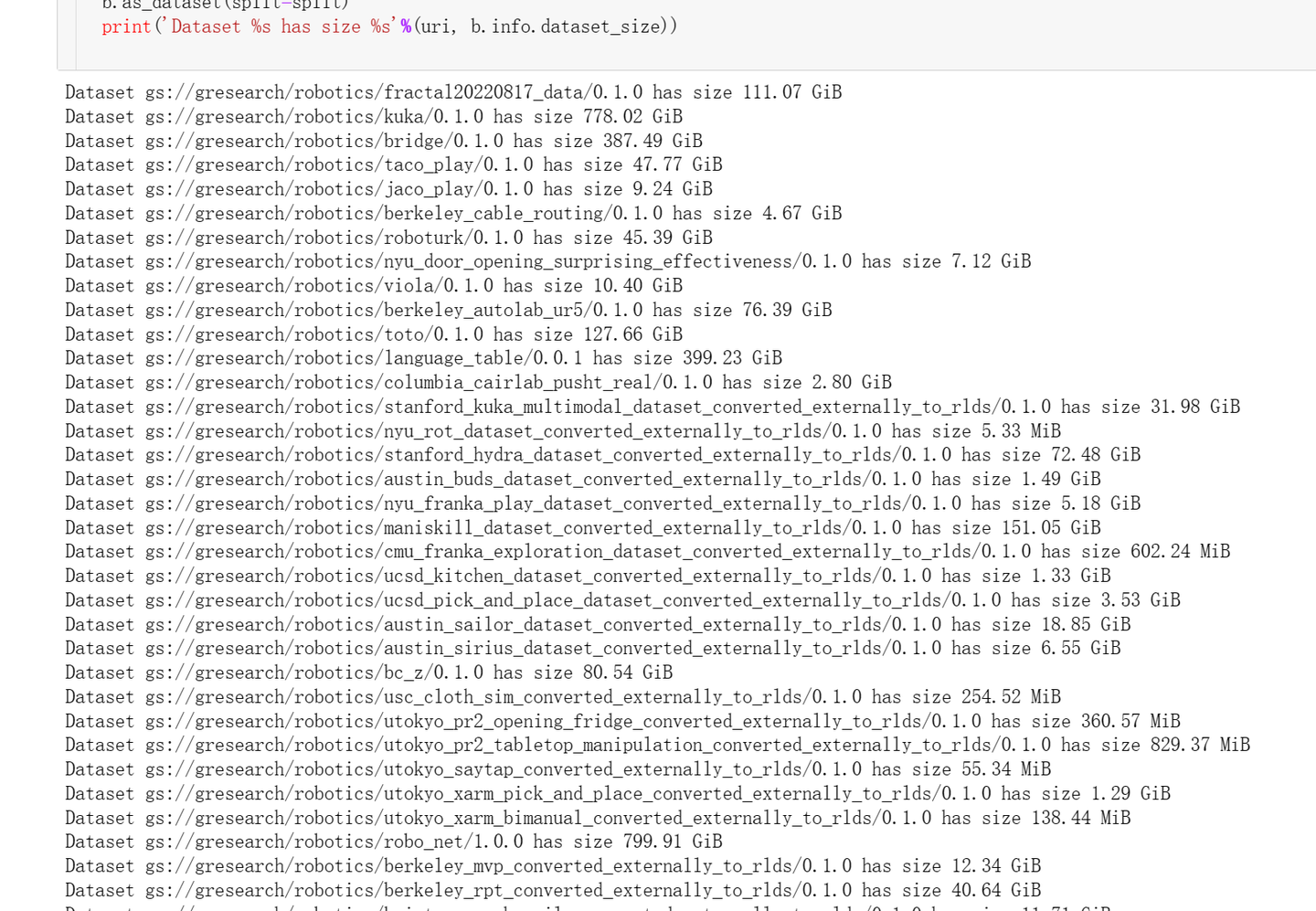
4. 在python中安装gsutil库(pip install gsutil)
5. 在命令行窗口执行按如下格式命令下载所需数据集:
gsutil cp -r gs://[BUCKET_NAME]/[OBJECT_NAME] [LOCAL_FILE_NAME]
(如:gsutil cp -r gs://gresearch/robotics/austin_buds_dataset_converted_externally_to_rlds/0.1.0 D:/Dataset/austin_buds_dataset_converted_externally_to_rlds)
(相关内容会继续探究,后续更新;如有错误,欢迎指出;欢迎相关研究人员一起讨论、多多指教)
演示视频:
 https://www.bilibili.com/video/BV19H4y1f7he/?vd_source=0fedbdd177c4764d295a0a019d79f71b
https://www.bilibili.com/video/BV19H4y1f7he/?vd_source=0fedbdd177c4764d295a0a019d79f71b
魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐
 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)