ubuntu18.04配置编译orb-slam3及运行EuRoc数据集
orb-slam3
·
1.安装boost库
官网上的依赖没有boost,但如果不安装boost会报很多的关于c++的错误,并且无法定位。
进入boost官网网址:http://www.boost.org/users/download/
tar -xvf 对应的版本.tar.gz
cd ./boost_1_77_0
./bootstrap.sh
sudo ./b2 install
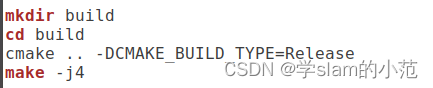
2.更改orb-slam3/build.sh
make -j4
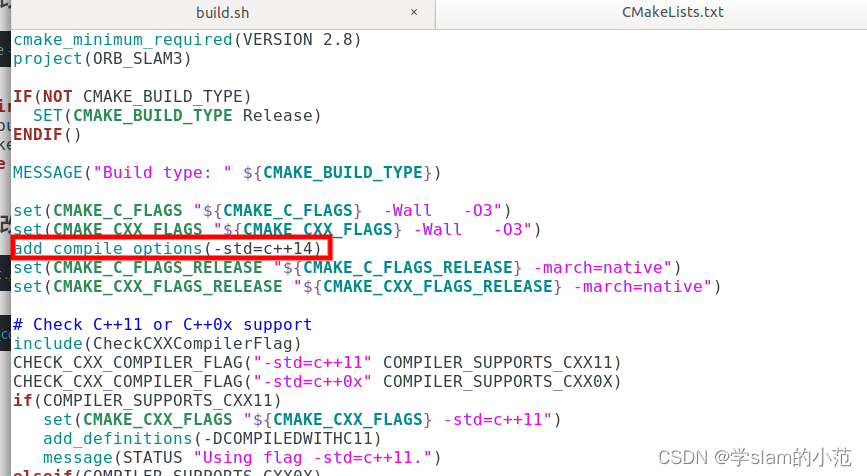
3.更改orb-slam3/CmakeLists.txt
gedit ./CMakeLists.txt
add_compile_options(-std=c++14)
4.编译成功后,下载EuRoc数据集中MH01
下载链接
图片数据集下载好解压后是一个mav0这种形式的文件夹,在ORB-SLAM3/Examples文件夹下新建一个datasets文件夹,在datasets文件夹新建一个名称为MH01的文件夹,把mav0整个文件夹拷贝到MH01文件夹中。
cd Examples
mkdir datasets
5.orb-slam3运行EuRoc数据集中MH01
(1)第一种方式运行
orb-slam命令格式:
# 命令格式 可执行文件 词袋路径 yaml路径 数据集图片路径 时间戳路径 需要保存的轨迹文件名称
./Monocular-Inertial/mono_inertial_euroc ../Vocabulary/ORBvoc.txt ./Monocular-Inertial/EuRoC.yaml ./datasets/MH01 ./Monocular-Inertial/EuRoC_TimeStamps/MH01.txt dataset-MH01_mono+imu
(1)第二种方式运行
我们自己创建一个脚本文件来运行它
cd Examples
touch Monocular-Inertial.sh
在Monocular-Inertial.sh文件中加入:
#!/bin/bash
pathDatasetEuroc='./datasets'
#Example, it is necesary to change it by the dataset path
# Monocular-Inertial Examples
echo "Launching MH01 with Monocular-Inertial sensor"
./Monocular-Inertial/mono_inertial_euroc ../Vocabulary/ORBvoc.txt ./Monocular-Inertial/EuRoC.yaml "$pathDatasetEuroc"/MH01 ./Monocular-Inertial/EuRoC_TimeStamps/MH01.txt dataset-MH01_mono+imu
#第一个参数 ../Vocabulary/ORBvoc.txt 词袋模型
#第二个参数 ./Monocular-Inertial/EuRoC.yaml 相机配置文件
#第三个参数 "$pathDatasetEuroc"/MH01 数据的位置
#第四个参数 ./Examples/Monocular-Inertial/EuRoC_TimeStamps/MH01.txt 数据里面的时间戳
#第五个参数 dataset-MH01_monoi 跑完之后保存的文件名格式
./Monocular-Inertial.sh
运行成功

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)