【毕业设计-2】利用KITTI数据集测试lio-sam算法流程及问题记录
(2)如果碰到kitti2bag执行不成功也可以尝试下更新pandas跟numpy库。解决方案:编写python脚本检查kitti数据集的.bin文件的通道数。结果:kitti数据集没有ring通道,需要重新找数据集。原因分析:可能是kitti数据集中没有ring通道。(1)kitti2bag:未找到命令。解决:重新配置环境变量。
1 使用下载的KIITI完整数据集测试
1.1 部署kitti2bag将下载的数据集转换为rosbag数据
将KITTI数据集转化为ROS bag包——kitti2bag使用教程_kitti的rosbag-CSDN博客
问题记录:
(1)kitti2bag:未找到命令
![]()
解决:重新配置环境变量
export PATH=$PATH:/home/lhl/.local/bin # 这里lhl要换成你自己的用户名
source ~/.bashrc(2)如果碰到kitti2bag执行不成功也可以尝试下更新pandas跟numpy库
lhl@eelab-System-Product-Name:~/downloads$ kitti2bag -t 2011_09_28 -r 0034 raw_synced Traceback (most recent call last):
File "/home/lhl/.local/bin/kitti2bag", line 7, in <module>
import pykitti
File "/home/lhl/.local/lib/python3.8/site-packages/pykitti/__init__.py", line 5, in < module>
from pykitti.tracking import tracking
File "/home/lhl/.local/lib/python3.8/site-packages/pykitti/tracking.py", line 7, in < module>
import pandas as pd
File "/home/lhl/.local/lib/python3.8/site-packages/pandas/__init__.py", line 22, in < module>
from pandas.compat import is_numpy_dev as _is_numpy_dev # pyright: ignore # noqa:F 401
File "/home/lhl/.local/lib/python3.8/site-packages/pandas/compat/__init__.py", line 1 6, in <module>
from pandas._typing import F
File "/home/lhl/.local/lib/python3.8/site-packages/pandas/_typing.py", line 139, in < module>
np.random.BitGenerator,
AttributeError: module 'numpy.random' has no attribute 'BitGenerator'
# 上面是报错 下面是解决方案
lhl@eelab-System-Product-Name:~/downloads$ pip install --upgrade numpy
lhl@eelab-System-Product-Name:~/downloads$ pip install --upgrade pandas
1.2 播放修改yaml文件
1.3 播放数据集测试
报错1:[ERROR] [1740638487.969488092]: Point cloud is not in dense format, please remove NaN points first!
解决方法:
尝试1:LIO-SAM仿真时-Point cloud is not in dense format, please remove NaN points first-CSDN博客
上述报错解决,出现新报错:
报错2:Point cloud ring channel not available, please configure your point cloud data!
搬运github解答:Point cloud ring channel not availiable · Issue #309 · TixiaoShan/LIO-SAM
在imageProjection中修改代码:
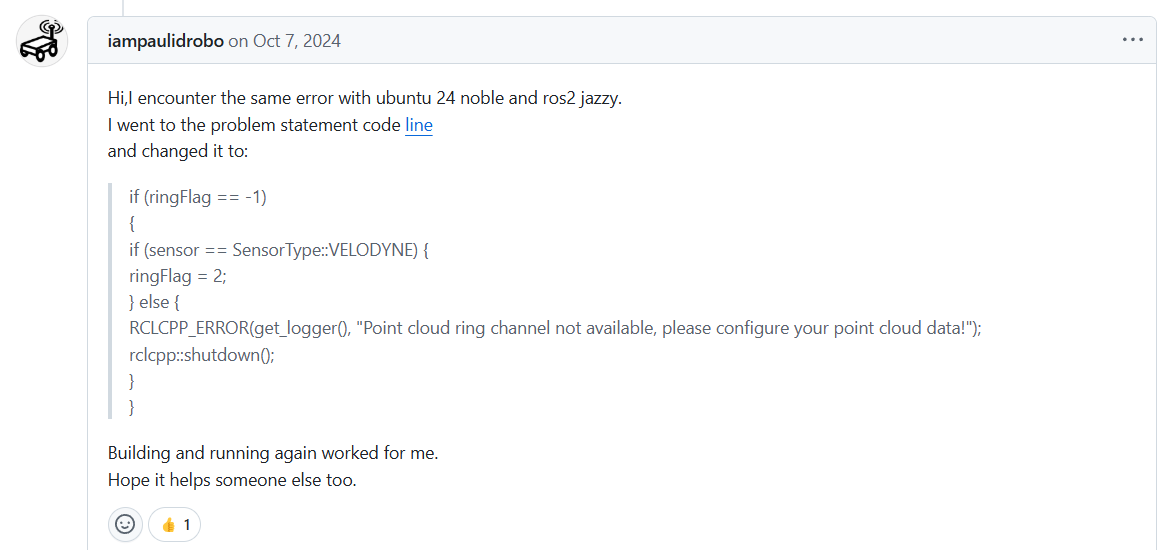
修改过后报错消失,稍后查看有无建图结果后更新。
1.4 lio-sam算法yaml文件imu外参配置
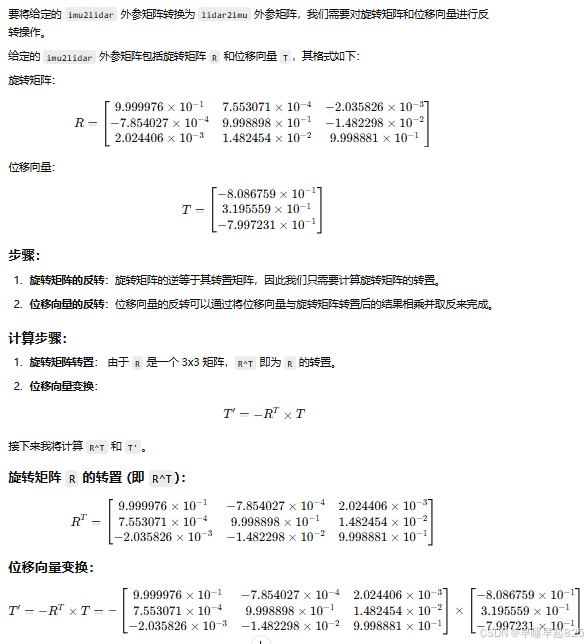
kitti数据集中的calib文件中有calib_imu2velo文件,我们yaml配置文件中需要的是lidar2imu(也就是激光雷达转换到imu),所以需要对calib_imu2velo文件中的矩阵进行反转之后填入。
calib_imu2velo的内容:

反转矩阵计算:
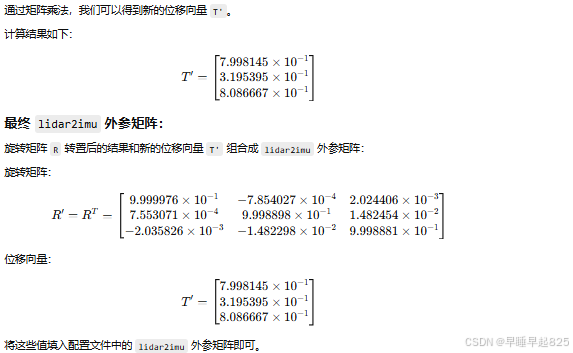
最后填入yaml文件的这个位置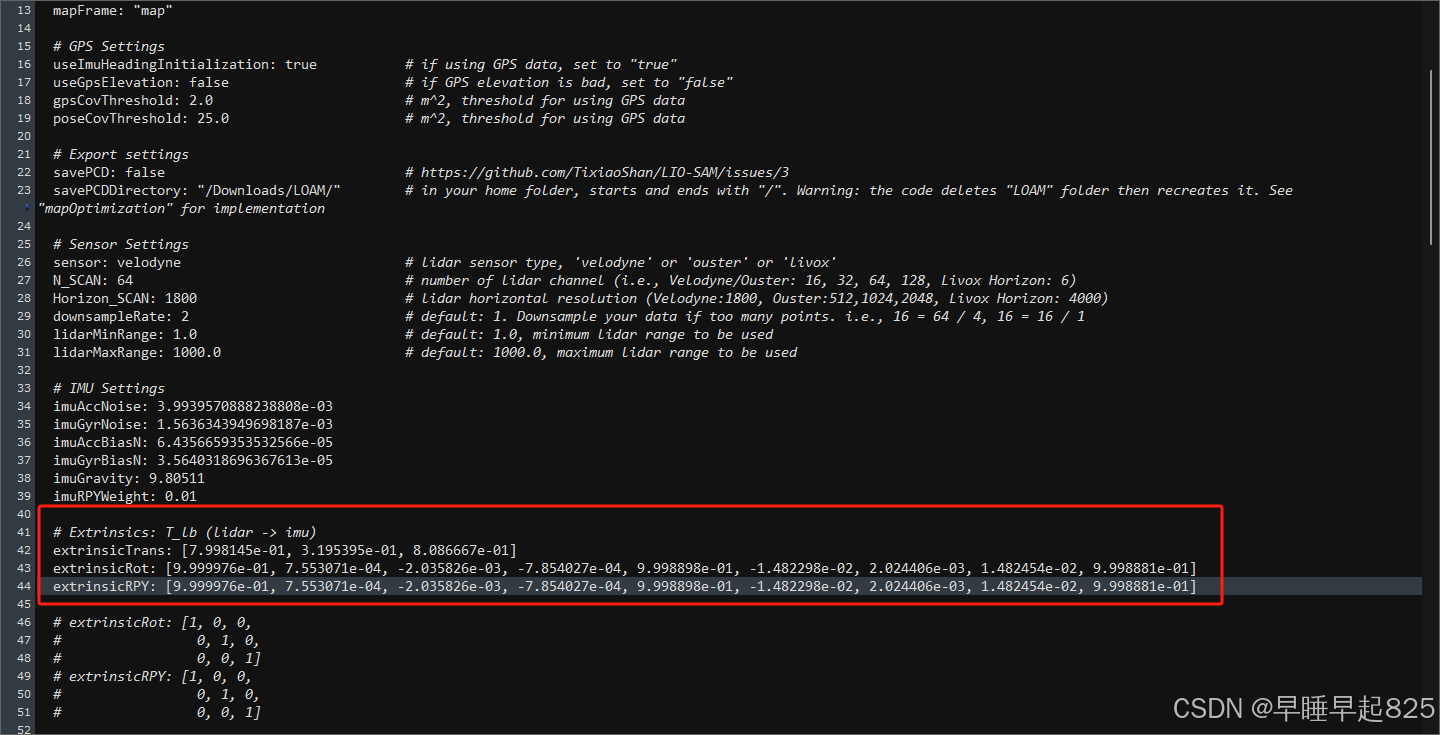
2 使用KIITI数据集中的odometry进行测试
参考:【将KITTI中的Odometry数据转换ros bag文件】_kitti数据集转bag-CSDN博客
下载源码
setpu.py install
配置环境变量
安装依赖库
Crypto安装失败 Crypto真正正确安装方法 pycryptodome erro 报错踩大坑记录(原创文章引用注明出处) - LySorose - 博客园

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)