使用PyTorch框架进行训练——裂缝检测语义分割数据集 并提供完整的代码示例
使用PyTorch框架进行训练——裂缝检测语义分割数据集 并提供完整的代码示例
·
将使用PyTorch框架进行训练,并提供完整的代码示例。
数据集准备
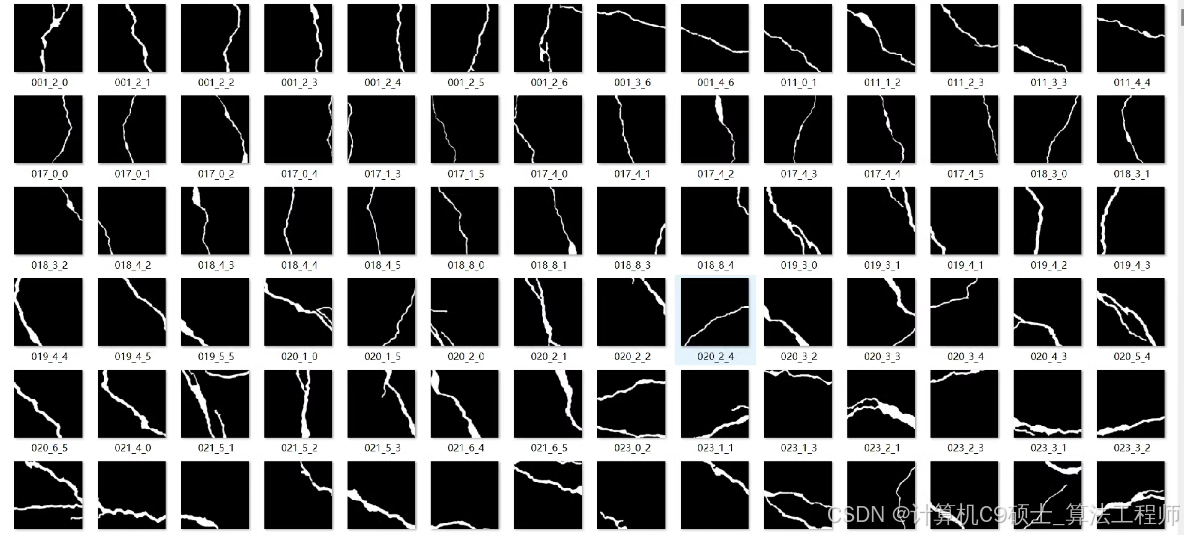
假设你的数据集包含2932张裂缝检测图像及其对应的标签图片,每一张都是原图和标签图片配对的形式。你需要将这些图像处理成统一的尺寸,即448x448像素。
目录结构
你的数据集目录可能如下所示:
crack_dataset/
├── images/
│ ├── image1.jpg
│ ├── image2.jpg
│ └── ...
├── masks/
│ ├── mask1.png
│ ├── mask2.png
│ └── ...
└── README.txt # 数据说明其中:
images/存放原图。masks/存放标签图片。
数据加载器
我们需要定义一个数据加载器来读取图像和标签掩膜:
import torch
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms
import os
import numpy as np
from PIL import Image
class CrackDetectionDataset(Dataset):
def __init__(self, images_dir, masks_dir, transform=None):
self.images_dir = images_dir
self.masks_dir = masks_dir
self.transform = transform
self.image_filenames = [os.path.join(images_dir, f) for f in sorted(os.listdir(images_dir))]
self.mask_filenames = [os.path.join(masks_dir, f) for f in sorted(os.listdir(masks_dir))]
def __len__(self):
return len(self.image_filenames)
def __getitem__(self, idx):
if torch.is_tensor(idx):
idx = idx.tolist()
img_name = self.image_filenames[idx]
mask_name = self.mask_filenames[idx]
image = Image.open(img_name).convert("RGB")
mask = Image.open(mask_name).convert("L")
if self.transform:
image = self.transform(image)
mask = self.transform(mask)
return image, mask
# 示例转换
transform = transforms.Compose([
transforms.Resize((448, 448)),
transforms.ToTensor(),
])
# 创建数据集实例
dataset = CrackDetectionDataset(
images_dir="path/to/crack_dataset/images/",
masks_dir="path/to/crack_dataset/masks/",
transform=transform
)
# 创建数据加载器
dataloader = DataLoader(dataset, batch_size=4, shuffle=True, num_workers=4)模型定义
我们可以使用U-Net作为基础模型来进行语义分割:
import torch.nn as nn
from collections import OrderedDict
class UNet(nn.Module):
def __init__(self, in_channels=3, out_channels=1, init_features=32):
super(UNet, self).__init__()
features = init_features
self.encoder1 = UNet._block(in_channels, features, name="enc1")
self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2)
self.encoder2 = UNet._block(features, features * 2, name="enc2")
self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2)
self.encoder3 = UNet._block(features * 2, features * 4, name="enc3")
self.pool3 = nn.MaxPool2d(kernel_size=2, stride=2)
self.encoder4 = UNet._block(features * 4, features * 8, name="enc4")
self.pool4 = nn.MaxPool2d(kernel_size=2, stride=2)
self.bottleneck = UNet._block(features * 8, features * 16, name="bottleneck")
self.upconv4 = nn.ConvTranspose2d(
features * 16, features * 8, kernel_size=2, stride=2
)
self.decoder4 = UNet._block((features * 8) * 2, features * 8, name="dec4")
self.upconv3 = nn.ConvTranspose2d(
features * 8, features * 4, kernel_size=2, stride=2
)
self.decoder3 = UNet._block((features * 4) * 2, features * 4, name="dec3")
self.upconv2 = nn.ConvTranspose2d(
features * 4, features * 2, kernel_size=2, stride=2
)
self.decoder2 = UNet._block((features * 2) * 2, features * 2, name="dec2")
self.upconv1 = nn.ConvTranspose2d(
features * 2, features, kernel_size=2, stride=2
)
self.decoder1 = UNet._block(features * 2, features, name="dec1")
self.conv = nn.Conv2d(
in_channels=features, out_channels=out_channels, kernel_size=1
)
def forward(self, x):
enc1 = self.encoder1(x)
enc2 = self.encoder2(self.pool1(enc1))
enc3 = self.encoder3(self.pool2(enc2))
enc4 = self.encoder4(self.pool3(enc3))
bottleneck = self.bottleneck(self.pool4(enc4))
dec4 = self.upconv4(bottleneck)
dec4 = torch.cat((dec4, enc4), dim=1)
dec4 = self.decoder4(dec4)
dec3 = self.upconv3(dec4)
dec3 = torch.cat((dec3, enc3), dim=1)
dec3 = self.decoder3(dec3)
dec2 = self.upconv2(dec3)
dec2 = torch.cat((dec2, enc2), dim=1)
dec2 = self.decoder2(dec2)
dec1 = self.upconv1(dec2)
dec1 = torch.cat((dec1, enc1), dim=1)
dec1 = self.decoder1(dec1)
return torch.sigmoid(self.conv(dec1))
@staticmethod
def _block(in_channels, features, name):
return nn.Sequential(
OrderedDict(
[
(
name + "conv1",
nn.Conv2d(
in_channels=in_channels,
out_channels=features,
kernel_size=3,
padding=1,
bias=False,
),
),
(name + "norm1", nn.BatchNorm2d(num_features=features)),
(name + "relu1", nn.ReLU(inplace=True)),
(
name + "conv2",
nn.Conv2d(
in_channels=features,
out_channels=features,
kernel_size=3,
padding=1,
bias=False,
),
),
(name + "norm2", nn.BatchNorm2d(num_features=features)),
(name + "relu2", nn.ReLU(inplace=True)),
]
)
)
# 实例化模型
model = UNet().cuda()模型训练
接下来定义训练循环:
import torch.optim as optim
# 设置损失函数和优化器
criterion = nn.BCEWithLogitsLoss() # 二分类交叉熵损失
optimizer = optim.Adam(model.parameters(), lr=0.001)
num_epochs = 100
for epoch in range(num_epochs):
model.train()
running_loss = 0.0
for inputs, labels in dataloader:
inputs, labels = inputs.cuda(), labels.cuda()
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, labels.unsqueeze(1).float())
loss.backward()
optimizer.step()
running_loss += loss.item() * inputs.size(0)
epoch_loss = running_loss / len(dataloader.dataset)
print(f'Epoch {epoch+1}/{num_epochs}, Loss: {epoch_loss:.4f}')模型评估
在训练完成后,我们需要评估模型的性能:
# 在验证集上评估模型
model.eval()
with torch.no_grad():
correct = 0
total = 0
for inputs, labels in dataloader:
inputs, labels = inputs.cuda(), labels.cuda()
outputs = model(inputs)
predicted = (outputs > 0.5).float()
total += labels.size(0)
correct += (predicted == labels.unsqueeze(1)).sum().item()
print(f'Accuracy of the network on the dataset: {100 * correct / total:.2f}%')模型预测
下面是一个使用训练好的模型进行预测的Python脚本示例:
import cv2
def predict_cracks(model, image_path, save_dir='results'):
# 加载图像
img = Image.open(image_path).convert("RGB")
# 应用相同的转换
if transform:
img = transform(img)
# 添加批次维度
img = img.unsqueeze(0).cuda()
# 使用模型进行预测
output = model(img)
# 后处理输出
pred_mask = (output > 0.5).float().squeeze().cpu().numpy()
# 可视化结果
img_np = np.array(img.squeeze().permute(1, 2, 0).cpu())
pred_mask = cv2.cvtColor(pred_mask, cv2.COLOR_GRAY2BGR)
result = np.concatenate((img_np, pred_mask), axis=1)
# 显示结果
cv2.imshow('Result', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 保存结果
cv2.imwrite(os.path.join(save_dir, os.path.basename(image_path)), result * 255)
if __name__ == '__main__':
model_path = 'path/to/your/best.pth' # 模型权重文件路径
image_path = 'path/to/your/image.jpg' # 测试图像路径
# 加载模型
model = UNet().cuda()
model.load_state_dict(torch.load(model_path))
model.eval()
# 进行预测
predict_cracks(model, image_path)完整的训练和预测流程
-
克隆深度学习框架:
pip install torch torchvision -
创建数据加载器:
data_loader.py -
定义模型:
model.py -
运行训练脚本:
train.py -
运行预测脚本:
predict.py
注意事项
- 数据集质量:确保数据集的质量,包括清晰度、标注准确性等。
- 模型选择:可以根据需求选择更复杂的模型或进行模型微调。
- 超参数调整:根据实际情况调整超参数,如学习率、批次大小等。
- 监控性能:训练过程中监控损失函数和准确率,确保模型收敛。
通过上述步骤,你可以使用PyTorch框架来训练一个裂缝检测的语义分割数据集,并使用训练好的模型进行预测。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 5
5 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)