【完整源码+数据集+部署教程】教学全程覆盖:食品蔬菜肉类识别图像分割
【完整源码+数据集+部署教程】教学全程覆盖:食品蔬菜肉类识别图像分割
研究背景与意义
研究背景与意义
随着全球人口的不断增长和城市化进程的加快,食品安全和营养健康问题日益凸显。食品的种类繁多,尤其是蔬菜和肉类的选择,直接影响到人们的饮食结构和健康水平。因此,如何高效、准确地识别和分类各种食品,成为了计算机视觉领域的重要研究方向之一。近年来,深度学习技术的快速发展为图像识别和分割提供了新的解决方案,尤其是基于卷积神经网络(CNN)的目标检测和分割模型,如YOLO(You Only Look Once)系列,因其高效性和实时性受到广泛关注。
YOLOv8作为YOLO系列的最新版本,具有更高的准确性和更快的处理速度,适用于实时图像处理任务。然而,针对食品、蔬菜和肉类的特定应用场景,YOLOv8的标准模型可能无法满足特定的识别需求。因此,基于YOLOv8的改进模型,专注于食品图像的分割和识别,具有重要的研究意义。
本研究的核心在于构建一个基于改进YOLOv8的食品蔬菜肉类识别图像分割系统。我们使用的图像数据集包含2000张图像,涵盖21个类别,包括牛肉、苦瓜、瓶瓜、西兰花、卷心菜、胡萝卜、花椰菜、鸡肉、鸡蛋、茄子、马鲛鱼、大蒜、生姜、鲈鱼、洋葱、木瓜、猪肉、土豆、山药、鲶鱼和西红柿等。这些类别不仅丰富多样,且在日常饮食中具有重要的营养价值和经济意义。通过对这些食品的准确识别和分割,能够为食品安全监测、智能餐饮服务以及农业生产管理提供强有力的技术支持。
在技术层面,改进YOLOv8模型的研究将重点关注如何提升模型在复杂背景下的识别精度和分割效果。通过引入数据增强、迁移学习等技术手段,优化模型的训练过程,力求在保持高效性的同时,提升对不同类别食品的识别能力。此外,针对不同食品的特征,设计相应的损失函数和评价指标,以更好地适应食品图像的特性,进而提高模型的实用性。
从应用角度来看,基于改进YOLOv8的食品蔬菜肉类识别图像分割系统不仅可以应用于智能厨房、食品配送等领域,还可以为食品行业的质量控制提供数据支持,助力食品追溯体系的建立。同时,该系统的研究成果也将为相关领域的学术研究提供新的思路和方法,推动计算机视觉技术在食品安全和健康饮食中的应用。
综上所述,基于改进YOLOv8的食品蔬菜肉类识别图像分割系统的研究,不仅具有重要的理论价值和应用前景,更是应对现代社会食品安全与健康挑战的重要手段。通过本研究的深入开展,期望能够为相关领域的技术进步和社会发展贡献一份力量。
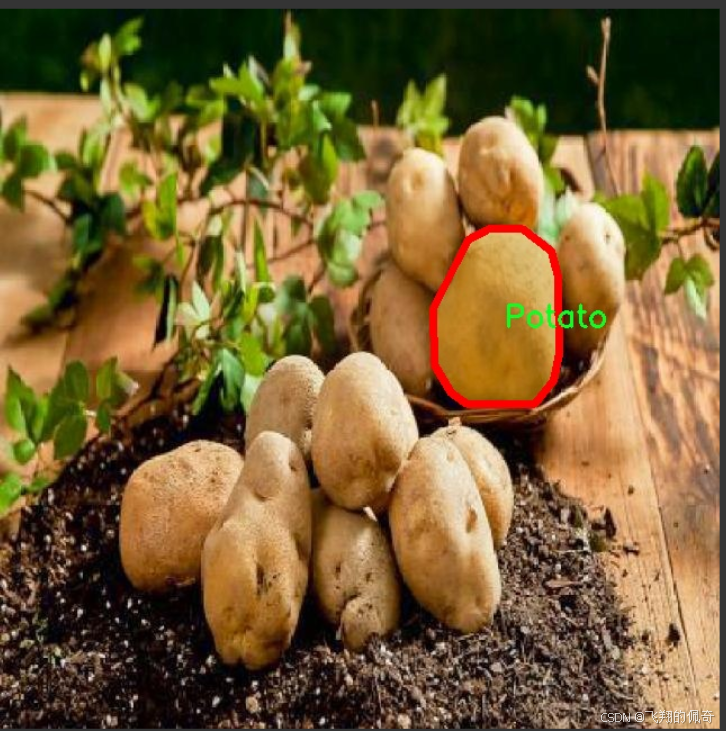
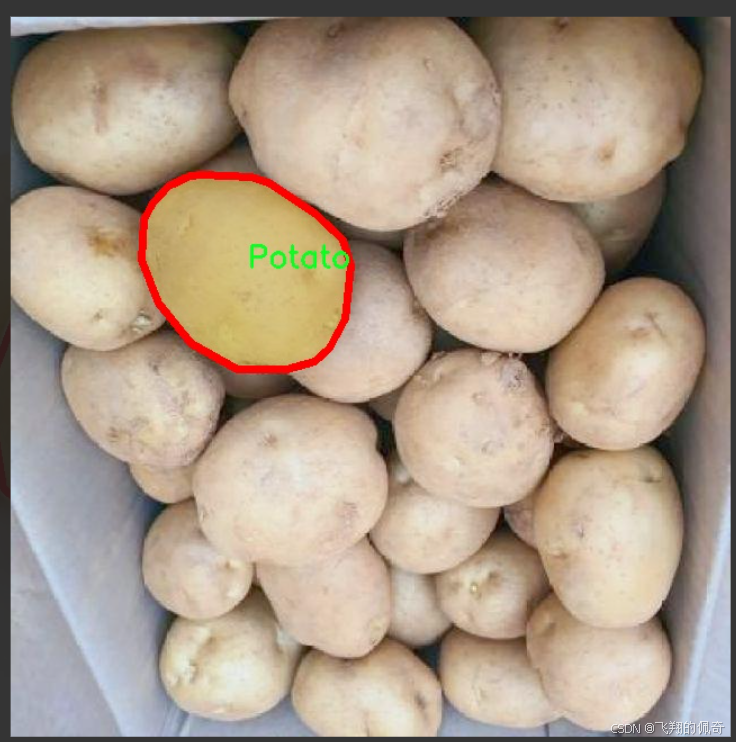
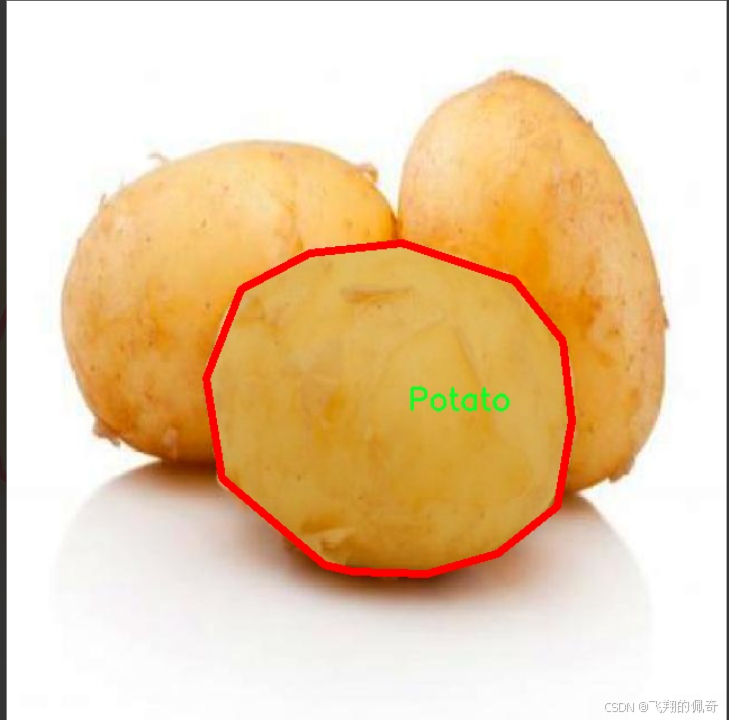
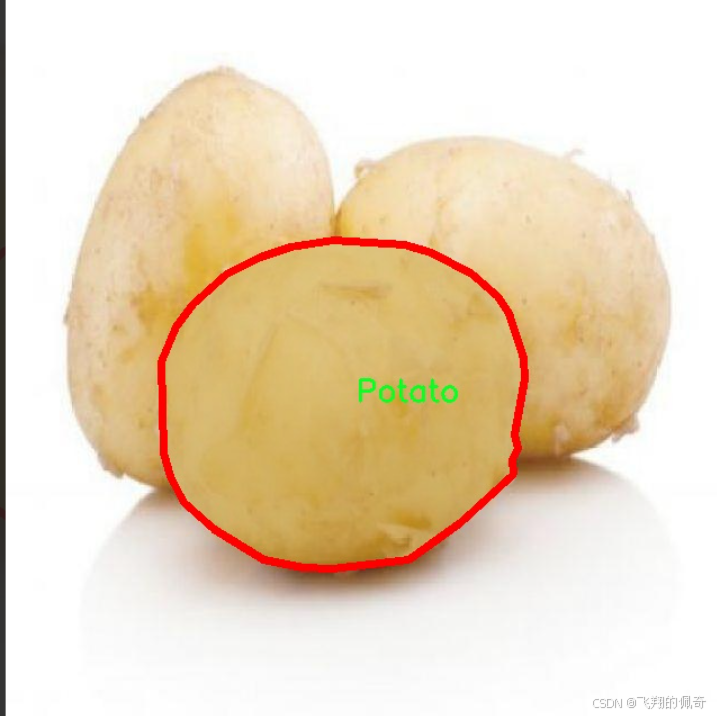
图片演示



数据集信息展示
数据集信息展示
在本研究中,我们使用了名为“Finals_IS 2”的数据集,以改进YOLOv8-seg的食品、蔬菜和肉类识别图像分割系统。该数据集包含21个类别,涵盖了多种常见的食品和蔬菜,为训练模型提供了丰富的样本和多样化的特征。这些类别包括:牛肉(Beef)、苦瓜(Bitter-Gourd)、瓶瓜(Bottle-Gourd)、西兰花(Broccoli)、卷心菜(Cabbage)、胡萝卜(Carrots)、花椰菜(Cauliflower)、鸡肉(Chicken)、鸡蛋(Egg)、茄子(Eggplant)、鲹鱼(Galunggong)、大蒜(Garlic)、生姜(Ginger)、牛奶鱼(Milkfish)、洋葱(Onion)、木瓜(Papaya)、猪肉(Pork)、土豆(Potato)、西葫芦(Sayote)、鲑鱼(Tilapia)和西红柿(Tomato)。
该数据集的构建经过精心设计,旨在确保每个类别的样本数量和质量,以便为深度学习模型提供足够的训练数据。每个类别的图像都经过严格筛选,确保其在不同的光照、角度和背景下都能保持清晰可辨的特征。这种多样性不仅提高了模型的鲁棒性,还增强了其在实际应用中的适应能力。
在数据集的图像分割任务中,YOLOv8-seg模型将利用这些标注好的图像进行训练,以实现对不同食品类别的精准识别和分割。通过对“Finals_IS 2”数据集的深入分析,我们可以观察到各类食品在形状、颜色和纹理上的显著差异,这为模型的学习提供了丰富的特征信息。例如,牛肉和猪肉在颜色和纹理上有明显区别,而西红柿和苦瓜则在形状和颜色上各具特色。这些特征的多样性使得模型能够在训练过程中有效地学习到不同类别之间的区分特征。
此外,数据集的类别分布也经过精心设计,以避免在训练过程中出现类别不平衡的问题。每个类别的样本数量相对均衡,这样可以确保模型在训练时不会偏向某一特定类别,从而提高整体识别精度。在实际应用中,模型将能够在各种场景下准确识别和分割出食品、蔬菜和肉类,为后续的智能识别和处理提供可靠的数据支持。
总之,“Finals_IS 2”数据集为改进YOLOv8-seg的食品蔬菜肉类识别图像分割系统提供了坚实的基础。通过对多样化样本的学习,模型将能够在复杂的实际环境中实现高效的图像分割和识别,为食品安全、质量检测和智能农业等领域的应用提供强有力的技术支持。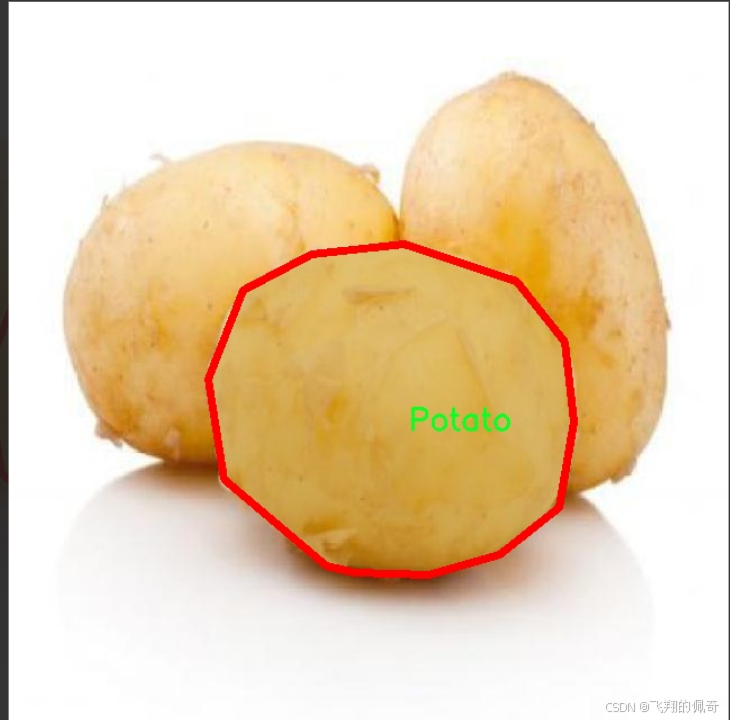
项目核心源码讲解(再也不用担心看不懂代码逻辑)
程序整体功能和构架概括
Ultralytics YOLO项目是一个开源的目标检测框架,旨在提供高效、灵活的模型训练和推理工具。该项目采用模块化设计,包含多个子模块,每个子模块负责特定的功能。整体架构包括模型定义、数据处理、增强、回调机制等部分,旨在为用户提供一个易于使用和扩展的深度学习平台。
模型模块:包括不同的模型实现,如YOLO和FastSAM,负责目标检测的核心算法。
数据处理模块:负责数据的加载、增强和预处理,以提高模型的训练效果。
回调机制:允许用户在训练过程中插入自定义逻辑,以便于监控和调整训练过程。
预测模块:处理模型的输出,进行后处理以生成最终的检测结果。
文件功能整理表
文件路径 功能描述
ultralytics/models/sam/modules/init.py 定义FastSAM模块的公共接口,导入相关类和函数,提供模块的基本信息和许可证声明。
ultralytics/utils/callbacks/base.py 定义回调函数的基类,提供训练、验证、预测和导出过程中的回调机制,允许用户插入自定义逻辑。
ultralytics/models/fastsam/init.py 定义FastSAM相关模块的公共接口,导入核心模型和相关功能,方便用户使用。
ultralytics/models/nas/predict.py 实现YOLO NAS模型的预测功能,负责对模型输出进行后处理,包括非极大值抑制和边界框调整。
ultralytics/data/augment.py 提供多种图像数据增强技术,包括马赛克、MixUp、随机翻转等,旨在提高模型的泛化能力和鲁棒性。
通过以上表格,可以清晰地了解每个文件的功能及其在Ultralytics YOLO项目中的作用。这种模块化的设计使得代码易于维护和扩展,同时也提高了用户的使用体验。
13.图片、视频、摄像头图像分割Demo(去除WebUI)代码
在这个博客小节中,我们将讨论如何在不使用WebUI的情况下,实现图像分割模型的使用。本项目代码已经优化整合,方便用户将分割功能嵌入自己的项目中。 核心功能包括图片、视频、摄像头图像的分割,ROI区域的轮廓提取、类别分类、周长计算、面积计算、圆度计算以及颜色提取等。 这些功能提供了良好的二次开发基础。
核心代码解读
以下是主要代码片段,我们会为每一块代码进行详细的批注解释:
import random
import cv2
import numpy as np
from PIL import ImageFont, ImageDraw, Image
from hashlib import md5
from model import Web_Detector
from chinese_name_list import Label_list
根据名称生成颜色
def generate_color_based_on_name(name):
…
计算多边形面积
def calculate_polygon_area(points):
return cv2.contourArea(points.astype(np.float32))
…
绘制中文标签
def draw_with_chinese(image, text, position, font_size=20, color=(255, 0, 0)):
image_pil = Image.fromarray(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
draw = ImageDraw.Draw(image_pil)
font = ImageFont.truetype(“simsun.ttc”, font_size, encoding=“unic”)
draw.text(position, text, font=font, fill=color)
return cv2.cvtColor(np.array(image_pil), cv2.COLOR_RGB2BGR)
动态调整参数
def adjust_parameter(image_size, base_size=1000):
max_size = max(image_size)
return max_size / base_size
绘制检测结果
def draw_detections(image, info, alpha=0.2):
name, bbox, conf, cls_id, mask = info[‘class_name’], info[‘bbox’], info[‘score’], info[‘class_id’], info[‘mask’]
adjust_param = adjust_parameter(image.shape[:2])
spacing = int(20 * adjust_param)
if mask is None:
x1, y1, x2, y2 = bbox
aim_frame_area = (x2 - x1) * (y2 - y1)
cv2.rectangle(image, (x1, y1), (x2, y2), color=(0, 0, 255), thickness=int(3 * adjust_param))
image = draw_with_chinese(image, name, (x1, y1 - int(30 * adjust_param)), font_size=int(35 * adjust_param))
y_offset = int(50 * adjust_param) # 类别名称上方绘制,其下方留出空间
else:
mask_points = np.concatenate(mask)
aim_frame_area = calculate_polygon_area(mask_points)
mask_color = generate_color_based_on_name(name)
try:
overlay = image.copy()
cv2.fillPoly(overlay, [mask_points.astype(np.int32)], mask_color)
image = cv2.addWeighted(overlay, 0.3, image, 0.7, 0)
cv2.drawContours(image, [mask_points.astype(np.int32)], -1, (0, 0, 255), thickness=int(8 * adjust_param))
# 计算面积、周长、圆度
area = cv2.contourArea(mask_points.astype(np.int32))
perimeter = cv2.arcLength(mask_points.astype(np.int32), True)
......
# 计算色彩
mask = np.zeros(image.shape[:2], dtype=np.uint8)
cv2.drawContours(mask, [mask_points.astype(np.int32)], -1, 255, -1)
color_points = cv2.findNonZero(mask)
......
# 绘制类别名称
x, y = np.min(mask_points, axis=0).astype(int)
image = draw_with_chinese(image, name, (x, y - int(30 * adjust_param)), font_size=int(35 * adjust_param))
y_offset = int(50 * adjust_param)
# 绘制面积、周长、圆度和色彩值
metrics = [("Area", area), ("Perimeter", perimeter), ("Circularity", circularity), ("Color", color_str)]
for idx, (metric_name, metric_value) in enumerate(metrics):
......
return image, aim_frame_area
处理每帧图像
def process_frame(model, image):
pre_img = model.preprocess(image)
pred = model.predict(pre_img)
det = pred[0] if det is not None and len(det)
if det:
det_info = model.postprocess(pred)
for info in det_info:
image, _ = draw_detections(image, info)
return image
if name == “main”:
cls_name = Label_list
model = Web_Detector()
model.load_model(“./weights/yolov8s-seg.pt”)
# 摄像头实时处理
cap = cv2.VideoCapture(0)
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
......
# 图片处理
image_path = './icon/OIP.jpg'
image = cv2.imread(image_path)
if image is not None:
processed_image = process_frame(model, image)
......
# 视频处理
video_path = '' # 输入视频的路径
cap = cv2.VideoCapture(video_path)
while cap.isOpened():
ret, frame = cap.read()
......
14.完整训练+Web前端界面+50+种创新点源码、数据集获取
源码文件
源码获取
可以直接加我下方的微信哦!

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 46
46 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)