世界模型驱动:自动驾驶决策系统的技术革新与挑战
世界模型为自动驾驶提供了一种类人的"想象力"——即在行动前对可能的未来进行推演评估的能力。尽管当前技术仍面临实时性瓶颈与认证挑战,其已在Waymo、特斯拉、小鹏等公司的影子模式验证中展现显著潜力。随着神经渲染与基础模型的爆炸性发展,我们有理由预见:未来三年内,融合多模态世界模型的端到端架构将成为L4级以上自动驾驶的主流方案。
·
一、为何需要世界模型?传统决策系统的能力边界
自动驾驶决策系统长期面临的核心挑战可总结为:
- 感知不确定性传导:原始传感器噪声、遮挡、极端天气导致的感知结果歧义性
- 长尾场景泛化不足:训练数据难以覆盖所有corner case(如突发事故、罕见交规冲突)
- 高维动作空间搜索难:在城市路口等复杂场景中,动作组合空间呈指数爆炸
- 安全性验证瓶颈:黑盒决策逻辑难以通过形式化方法证明其可靠性
python
# 传统基于规则的决策伪代码示例 (易陷入规则爆炸)
def rule_based_decision(perception_data):
if car_in_front and distance < safe_threshold:
return "brake"
elif pedestrian_near_crosswalk:
return "yield"
elif traffic_light == "red":
return "stop"
else:
return "proceed" # 无法处理未定义的交互场景关键洞察:世界模型通过构建可微分的环境动力学模拟器,使决策系统具备预测与推理能力,突破规则系统的表达能力瓶颈。
二、世界模型核心架构:从环境表征到未来推演
一套完整的世界模型驱动决策系统包含三大技术支柱:
1. 环境状态编码器 (State Encoder)
- 输入:多模态传感器数据 (Camera, LiDAR, Radar等)
- 输出:低维潜空间状态向量 zt
- 关键技术:
- Transformer-based Sensor Fusion: Cross-attention机制融合异质传感特征
- Neural Radiance Fields (NeRF): 构建隐式场景几何与语义表征
- Graph Neural Networks (GNN): 动态交通参与者关系建模
2. 动态转移模型 (Transition Model)
- 建模状态演化:z^t+1=fθ(zt,at)
- 核心算法创新:
- Stochastic Recurrent Networks: 如PlaNet的 RSSM 处理部分可观测性
- Diffusion Models: 捕获多模态未来状态分布
- Physics-informed Neural Nets: 引入车辆动力学约束
python
# 简化的确定性状态转移模型 (PyTorch伪代码)
class WorldModel(nn.Module):
def __init__(self, state_dim, action_dim):
self.gru = nn.GRUCell(state_dim + action_dim, state_dim)
def forward(self, z_t, a_t):
x = torch.cat([z_t, a_t], dim=-1)
z_next = self.gru(x)
return z_next # 预测下一时刻潜状态3. 奖励/代价预测器 (Reward Predictor)
- 学习环境反馈信号:r^t=gϕ(zt)
- 关键设计:
- 安全代价建模:碰撞概率、跟车距离风险
- 舒适性指标:加加速度(jerk)惩罚、转向平滑度
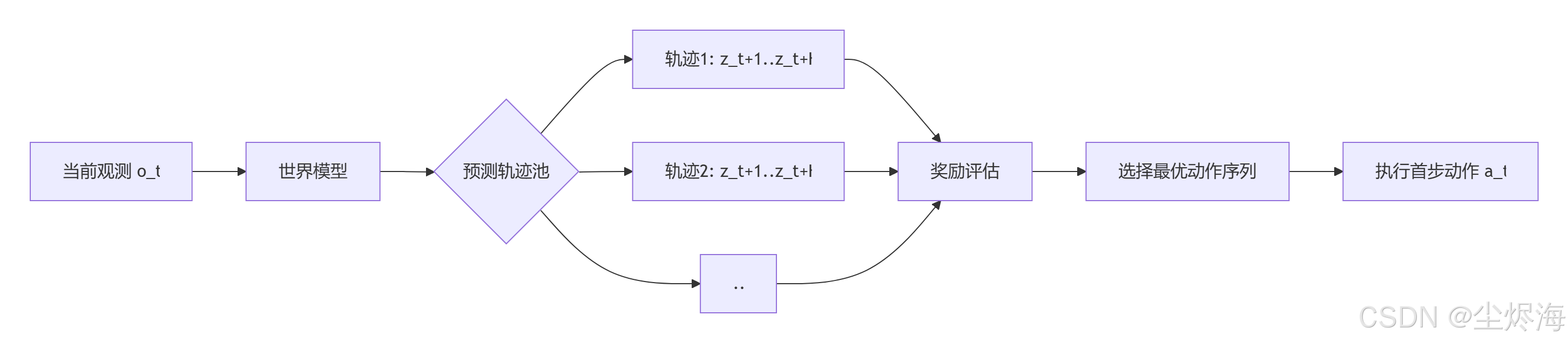
三、世界模型驱动的决策机制
1. Model Predictive Control (MPC) 范式
- 在线优化问题:
maxat:t+H∑k=0Hγkr^t+ks.t.z^t+k+1=fθ(z^t+k,at+k) - 优化方法:
- Cross-Entropy Method (CEM):高效随机采样优化
- Differentiable Planning:通过梯度下降求解
2. 不确定性感知决策
- 采用Bayesian神经网络建模epistemic uncertainty
- 使用Ensemble方法量化模型预测分歧度
- 风险敏感策略:在high-uncertainty区域触发保守策略
四、工业级实现挑战与技术应对
▶︎ 挑战1:模型精度-效率权衡
- 技术方案:
- 知识蒸馏:训练轻量化Student模型(如MobileNet+Transformer)
- 模型分治:分层级预测(战略层/战术层)
▶︎ 挑战2:闭环仿真验证
- 技术方案:
- 构建神经渲染引擎(如GAN/NeRF-based)生成逼真测试场景
- 采用逆强化学习(IRL)从人类数据中提取奖励函数
▶︎ 挑战3:安全临界场景处理
- 技术方案:
- 引入形式化验证模块:如SMT求解器验证安全边界
- 构建Fallback机制:如基于Control Barrier Functions的安全滤波器
五、前沿进展:大模型赋能的下一代世界模型
-
LLM as a World Model:
- DriveGPT (Wayve):利用语言模型理解交通规则与社会规范
- GPT-Driver:通过Prompt工程注入驾驶知识
-
Generative World Simulators:
- GAIA-1 (Wayve):基于视频扩散模型生成高保真驾驶场景
- WorldDreamer:端到端生成闭环仿真环境
技术展望:语言模型的社会常识与视觉基础模型的场景理解能力正快速融入世界模型,推动其向可解释、可对话的认知架构演进。
结语:通往自主决策的“意识”之路
世界模型为自动驾驶提供了一种类人的"想象力"——即在行动前对可能的未来进行推演评估的能力。尽管当前技术仍面临实时性瓶颈与认证挑战,其已在Waymo、特斯拉、小鹏等公司的影子模式验证中展现显著潜力。随着神经渲染与基础模型的爆炸性发展,我们有理由预见:未来三年内,融合多模态世界模型的端到端架构将成为L4级以上自动驾驶的主流方案。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 29
29 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)