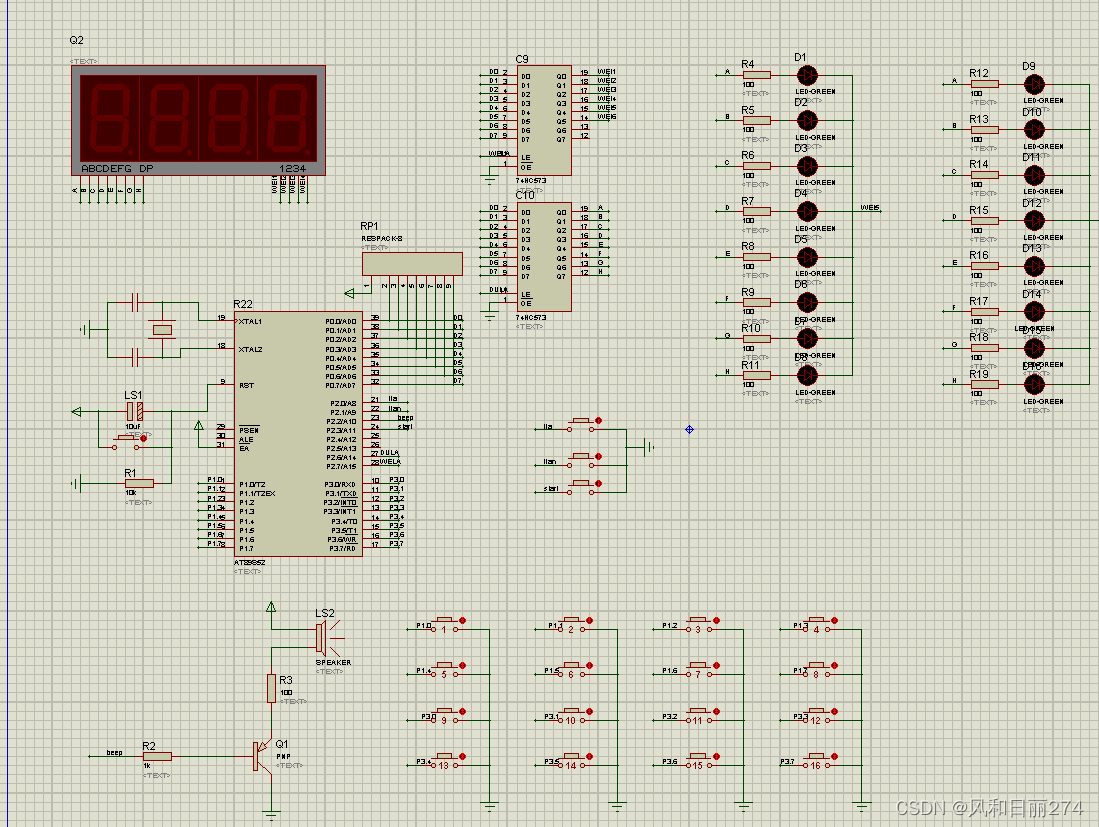
259 基于单片机16路多路抢答器仿真系统设计
抢答器具有数据锁存和显示功能.当某一路抢答成功时.发光二极管立即点亮.并在该电路上显示该路的号数.直到主持人按复位开关为止.此时其他人抢答无效。抢答器具有定时抢答功能.且抢答时间可以由主持人设定(如97s).当主持人按下“开始”按钮后.要求定时器立即倒计时.并在显示器上显示时间.同时发出“滴”的声响。在设定的时间内抢答.则抢答有效.定时器停止工作.显示器上显示选手的编号和抢答时刻的时间.并保持到主
·
抢答器具有数据锁存和显示功能.当某一路抢答成功时.发光二极管立即点亮.并在该电路上显示该路的号数.直到主持人按复位开关为止.此时其他人抢答无效。
抢答器具有定时抢答功能.且抢答时间可以由主持人设定(如97s).当主持人按下“开始”按钮后.要求定时器立即倒计时.并在显示器上显示时间.同时发出“滴”的声响。
在设定的时间内抢答.则抢答有效.定时器停止工作.显示器上显示选手的编号和抢答时刻的时间.并保持到主持人将系统清零
如果定时器的时间已到.却没有选手抢答.则本次抢答无效.系统会短暂的报警.并且封锁输入电路禁止选手超时抢答.时间显示器上显示00.
完整版 电路图和程序代码 下载地址
https://pan.baidu.com/s/1Br8NR0uop_mHvSC6kf7vbQ?pwd=8888
部分代码展示
#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义
#define DataPort P0 //定义数据端口 程序中遇到DataPort 则用P0 替换
#define uchar unsigned char; //定义数据类型 程序中遇到unsigned char 则用uchar替换
#define uint unsigned int; //定义数据类型 程序中遇到unsigned int 则用uint替换
sbit add=P2^0;
sbit jian=P2^1;
sbit beep=P2^2; //定义报警输入端口
sbit start=P2^3;
sbit WEI=P2^7; //定义锁存使能端口 位锁存
sbit DUAN=P2^6; //定义锁存使能端口 段锁存
sbit key1=P1^0;
sbit key2=P1^1;
sbit key3=P1^2;
sbit key4=P1^3;
sbit key5=P1^4;
sbit key6=P1^5;
sbit key7=P1^6;
sbit key8=P1^7;
sbit key9=P3^0;
sbit key10=P3^1;
sbit key11=P3^2;
sbit key12=P3^3;
sbit key13=P3^4;
sbit key14=P3^5;
sbit key15=P3^6;
sbit key16=P3^7;
uchar code dofly_DuanMa[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};// 显示段码值0~9
uchar code dofly_WeiMa[10]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};//分别对应相应的数码管点亮,即位码
uchar code table[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
uchar TempData[8]; //存储显示值的全局变量
//函数声明
void DelayUs2x(unsigned char t);
void DelayMs(unsigned char t);
void Delay(unsigned char t);
void Display(unsigned char FirstBit,unsigned char Num);
void check1();
void check2();
void keyscan();
uchar n,m,num,t,time;
bit flag;
/*---------------------------------------------------
主函数
---------------------------------------------------*/
void main (void)
{
EA=1;
TMOD=0x11;
TH0=(65536-50000)/256;//这是50ms的
TL0=(65536-50000)%256;
ET0=1;
TR0=0;
TH1=(65536-50000)/256;//这是50ms的
TL1=(65536-50000)%256;
ET1=1;
TR1=1;
time=97;
num=0;
flag=0;
while (1) //主循环
{
TempData[2]=dofly_DuanMa[time/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[3]=dofly_DuanMa[time%10];
if(num!=0)
m=1;
if(start==0)
{
DelayMs(10);
if(start==0)
{
flag=1;
while(!start);
}
}
if(add==0)
{
DelayMs(10);
if(add==0)
{
time++;
while(!add);
}
}
if(jian==0)
{
DelayMs(10);
if(jian==0)
{
time--;
while(!jian);
}
}
if(time>=99)
time=99;
if(flag==0)
{
if(num!=0)
m=1;
keyscan();
check2();
}
if(flag==1)
{
TR0=1;
if(num!=0)
m=1;
keyscan();
check1();
}
//主循环中添加其他需要一直工作的程序
}
}
void timer_t0() interrupt 1
{
TH0=(65536-50000)/256;//这是50ms的
TL0=(65536-50000)%256;
t++;
beep=0;
if(t==20)//设置为20,就是1s为高1s为低
{
beep=1;
t=0;
time--;
TempData[2]=dofly_DuanMa[time/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[3]=dofly_DuanMa[time%10];
if(time<=0)
{
time=0;
}
}
}
void timer_t1() interrupt 3
{
TH1=(65536-50000)/256;//这是50ms的
TL1=(65536-50000)%256;
Display(0,8); //数码管显示函数
}
void check1()
{
if(num==1)
{
TempData[0]=dofly_DuanMa[num/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[1]=dofly_DuanMa[num%10];
TempData[4]=table[0];
beep=1;
Display(0,8); //数码管显示函数
TR0=0;
while(m);
}
if(num==2)
{
TempData[0]=dofly_DuanMa[num/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[1]=dofly_DuanMa[num%10];
TempData[4]=table[1];
beep=1;
Display(0,8); //数码管显示函数
TR0=0;
while(m);
}
if(num==3)
{
TempData[0]=dofly_DuanMa[num/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[1]=dofly_DuanMa[num%10];
TempData[4]=table[2];
beep=1;
Display(0,8); //数码管显示函数
TR0=0;
while(m);
}
if(num==4)
{
TempData[0]=dofly_DuanMa[num/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[1]=dofly_DuanMa[num%10];
TempData[4]=table[3];
beep=1;
Display(0,8); //数码管显示函数
TR0=0;
while(m);
}
if(num==5)
{
TempData[0]=dofly_DuanMa[num/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[1]=dofly_DuanMa[num%10];
TempData[4]=table[4];
beep=1;
Display(0,8); //数码管显示函数
TR0=0;
while(m);
}
if(num==6)
{
TempData[0]=dofly_DuanMa[num/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[1]=dofly_DuanMa[num%10];
TempData[4]=table[5];
beep=1;
Display(0,8); //数码管显示函数
TR0=0;
while(m);
}
if(num==7)
{
TempData[0]=dofly_DuanMa[num/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[1]=dofly_DuanMa[num%10];
TempData[4]=table[6];
beep=1;
Display(0,8); //数码管显示函数
TR0=0;
while(m);
}
if(num==8)
{
TempData[0]=dofly_DuanMa[num/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[1]=dofly_DuanMa[num%10];
TempData[4]=table[7];
beep=1;
Display(0,8); //数码管显示函数
TR0=0;
while(m);
}
if(num==9)
{
TempData[0]=dofly_DuanMa[num/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[1]=dofly_DuanMa[num%10];
TempData[5]=table[0];
beep=1;
Display(0,8); //数码管显示函数
TR0=0;
while(m);
}
if(num==10)
{
TempData[0]=dofly_DuanMa[num/10];//分解显示信息,如要显示68,则68/10=6 68%10=8
TempData[1]=dofly_DuanMa[num%10];
TempData[5]=table[1];
beep=1;
Display(0,8); //数码管显示函数
TR0=0;
while(m);
}
魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 10
10 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)