数据结构——图的存储结构
无向图中数组array中元素表示两个顶点之间的关系,如果array[ i ] [ j ]=1表示顶点 i 和顶点 j 之间有一条边。有向图中数组array中元素表示两个顶点之间的关系,如果array[ i ] [ j ]=1表示顶点 i 到顶点 j 之间有一条边。如果为0,表示顶点 i 到顶点 j 没有边。如果array[ i ] [ j ]=weight表示顶点 i 到(和)顶点 j 之间有一条
1.邻接矩阵
邻接矩阵采用顺序存储结构,用二维数组表示。
(1)无向图
无向图中数组array中元素表示两个顶点之间的关系,如果array[ i ] [ j ]=1表示顶点 i 和顶点 j 之间有一条边。如果为0,表示没有边将顶点 i 和顶点 j 相连。
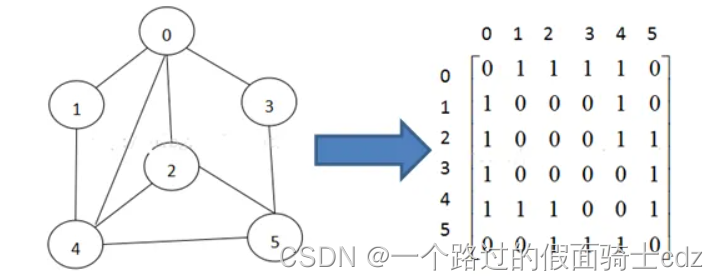 观察矩阵是对称矩阵,可以压缩为n(n-1)/2的一维数组表示。
观察矩阵是对称矩阵,可以压缩为n(n-1)/2的一维数组表示。
且第i行或者第i列中非零元素个数表示顶点i的度。
(2)有向图
有向图中数组array中元素表示两个顶点之间的关系,如果array[ i ] [ j ]=1表示顶点 i 到顶点 j 之间有一条边。如果为0,表示顶点 i 到顶点 j 没有边。
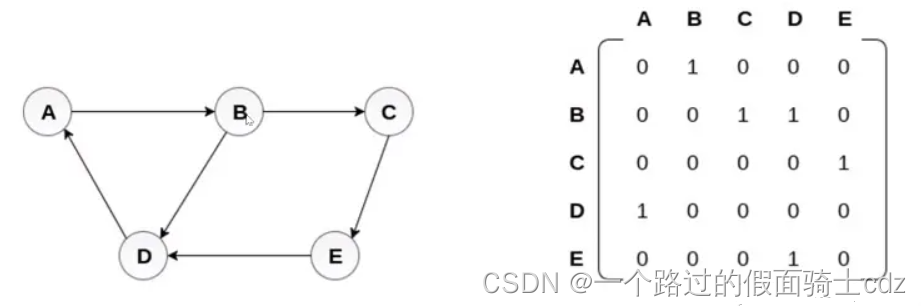
观察到矩阵不一定是对称的。
且第 i 行是顶点 i 的出度,第 i 列是顶点 i 的入度。
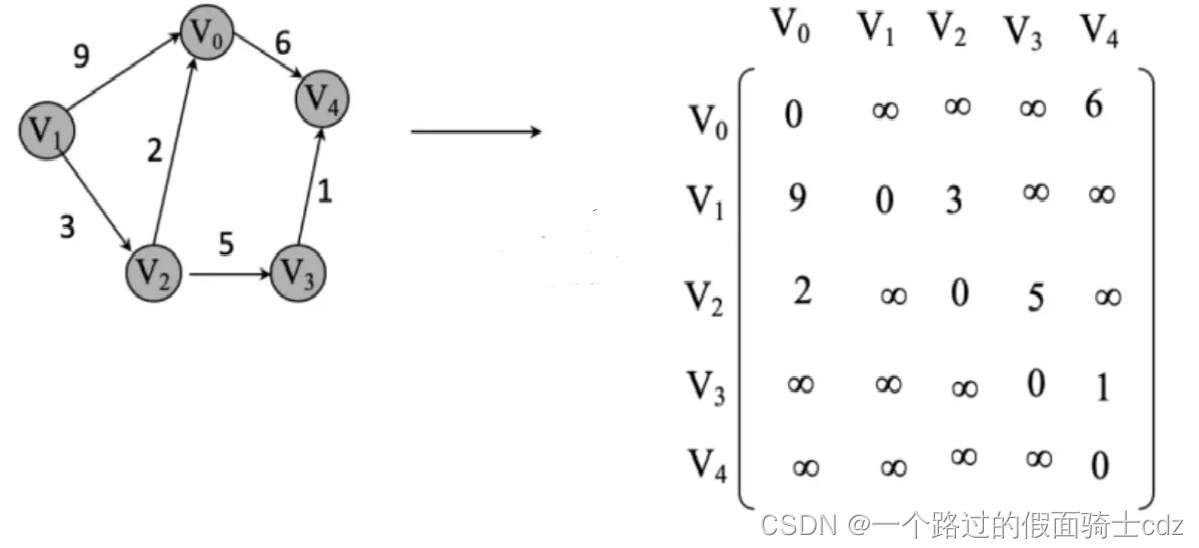
(3)网的邻接矩阵
网即是有权值的图。
网中数组array中元素表示两个顶点之间的关系。
如果array[ i ] [ j ]=weight表示顶点 i 到(和)顶点 j 之间有一条边,其权值为weight。
如果array[ i ] [ j ]=正无穷表示顶点 i 到(和)顶点 j 之间没有边。
如果i和j是同一顶点,array[ i ] [ j ]=0。当然也可以为正无穷,灵活变化。
特点
1.图的邻接表示是惟一的。
2.含有n个顶点,其邻接矩阵的空间代价为O(n),与图顶点有关,而与边无关。
3.当邻接矩阵是稀疏矩阵,可以用三元组形式存储。
#pragma once
template<class e_type>
class adjacency_matrix
{
e_type** matrix;//表示边组
int dot_sum;//表示顶点个数
public:
adjacency_matrix(int init_size);
~adjacency_matrix();
void change(int i, int j,const e_type& data);
bool search(int i, int j)const;
bool add(int i, int j, const e_type& data);
bool remove(int i, int j);
};
template<class e_type>
adjacency_matrix<e_type>::adjacency_matrix(int init_size)
{
dot_sum = init_size;
//申请内存空间,我不想用vector数组,腻了。
matrix = new e_type * [dot_sum];
for (int i = 0; i < dot_sum; i++)
matrix[i] = new e_type[dot_sum];
//输入边情况
for (int i = 0; i < dot_sum; i++)
{
for (int j = 0; j < dot_sum; j++)
{
e_type temp;
cin >> temp;
change(i, j, temp);
}
}
}
template<class e_type>
adjacency_matrix<e_type>::~adjacency_matrix()
{
for (int i = 0; i < dot_sum; i++)
{
e_type* temp = matrix[i];
delete[] temp;
}
}
template<class e_type>
void adjacency_matrix<e_type>::change(int i, int j, const e_type& data)
{
if (i < 0 || j < 0 || i >= dot_sum || j >= dot_sum)
throw("out of range!");
if (search(matrix[i][j]))//有边才能修改
matrix[i][j] = data;
else throw("no edge");
}
template<class e_type>
bool adjacency_matrix<e_type>::search(int i, int j)const
{
if (i < 0 || j < 0 || i >= dot_sum || j >= dot_sum)
throw("out of range!");
return matrix[i][j] != 0;
}
template<class e_type>
bool adjacency_matrix<e_type>::add(int i, int j, const e_type& data)
{
if (i < 0 || j < 0 || i >= dot_sum || j >= dot_sum)
throw("out of range");
if (!search(i, j))//不存在才能添加
matrix[i][j] = data;
else throw("edge has existed!");
}
template<class e_type>
bool adjacency_matrix<e_type>::remove(int i, int j)
{
if (i < 0 || j < 0 || i >= dot_sum || j >= dot_sum)
throw("out of range");
if (search(i, j))//存在才能删除
matrix[i][j] = 0;
//无向图
//if (search(j, i))//存在才能删除
//matrix[j][i] = 0;
else throw("edge has not exist!");
}2.邻接表
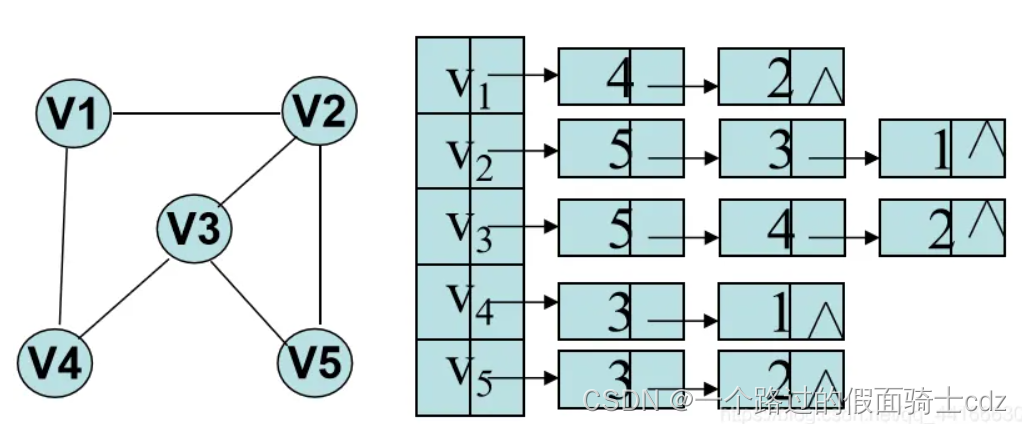
邻接表是顺序存储和链式存储相结合的一种方法。对顶点顺序存储,对其边链式存储。
顶点结点结构中数据域表示一个顶点,其指针域表示与其相关的顶点集合。
如果是网,多加一个数据项存储权值。
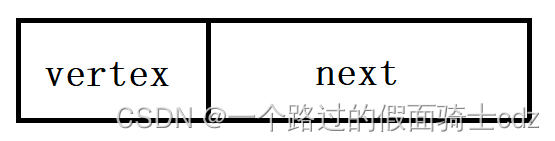
边结点结构数据域表示一个顶点,其指针指向下一个与顶点结点相关的边结点。
(1)无向图
无向图的边结点表示与顶点结点有边相连的关系。
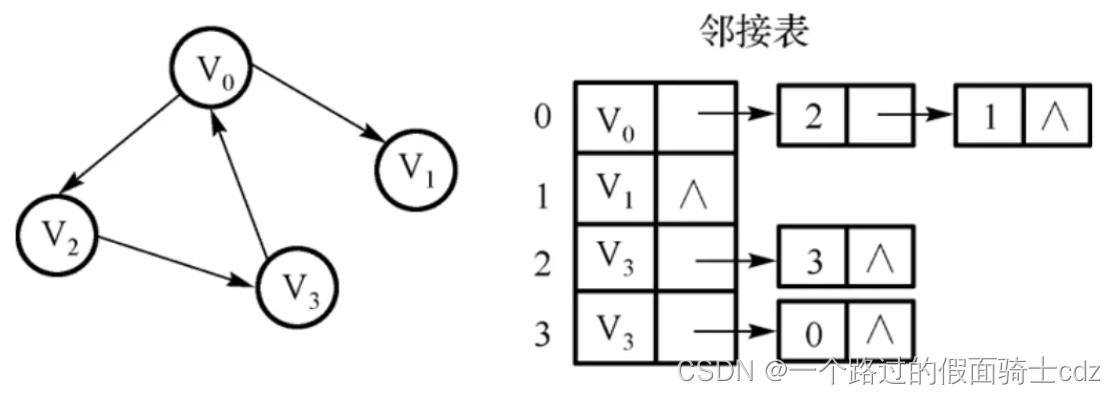
(2)有向图
有向图的边结点表示顶点结点为起点,有以边结点为终点的关系。
特点
1.图的邻接表表示不为1(链表前后元素可以调换)。
2.对于无向图,顶点的度是链表的长度-1。
3.对于有向图,顶点的出度是链表的长度-1。入度需要遍历整个邻接表。
4.存储空间主要与顶点数n和边数e有关,无向图空间复杂度为O(n+2e),有向图为O(n+e)。
5.当边数小于n(n-1)/2即有向图最多边数的一半时,就可以用三元组压缩存储。
//头文件
#pragma once
class adjacency_list
{
struct edge_node
{
int vertex;
edge_node* next;
edge_node(edge_node* h = nullptr) :next(h) {}
};
struct vertex_node
{
int vertex;
edge_node* head;
//int weight//可以加权
vertex_node(edge_node* h=nullptr):head(h){}
};
public:
vertex_node* node;
int cur_size;
adjacency_list(int init_size);
~adjacency_list();
bool search(int i, int j)const;
bool add(int i, int j);
bool remove(int i, int j);
};
//源文件
#include "adjacency_list.h"
adjacency_list::adjacency_list(int init_size)
{
if (init_size <= 0)
throw("error");
cur_size = init_size;
node = new vertex_node[cur_size];
}
adjacency_list::~adjacency_list()
{
for (int i = 0; i < cur_size; i++)
{
while (node[i].head->next)
{
edge_node* p = node[i].head->next;
node[i].head->next = p->next;
delete p;
}
}
delete[]node;
}
bool adjacency_list::search(int i, int j)const
{
if (i < 0 || j < 0 || i >= cur_size || j >= cur_size)
throw("out of range");
edge_node* p = node[i].head->next;
while (p)
{
if (p->vertex == j)
return true;
else p = p->next;
}
return false;
}
bool adjacency_list::add(int i, int j)
{
if (i < 0 || j < 0 || i >= cur_size || j >= cur_size)
throw("out of range");
if (search(i, j))//已经存在
return false;
edge_node* p = new edge_node;
p->vertex = j;
edge_node* q = node[i].head->next;
node[i].head->next = p;
p->next = q;
return true;
}
bool adjacency_list::remove(int i, int j)
{
if (i < 0 || j < 0 || i >= cur_size || j >= cur_size)
throw("out of range");
edge_node* p = node[i].head->next;
edge_node* p_pre = node[i].head;
while (p)
{
if (p->vertex == j)
{
p_pre->next = p->next;
delete p;
return true;
}
else
{
p_pre = p;
p = p->next;
}
}
return false;
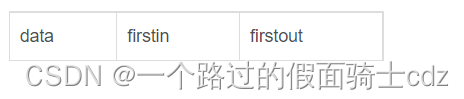
}3.十字链表
十字链表用于有向图,既可以快速查找入度边,也可以快速查出度边。
顶点结构有数据域表示顶点,指针分别表示入边表和出边表。
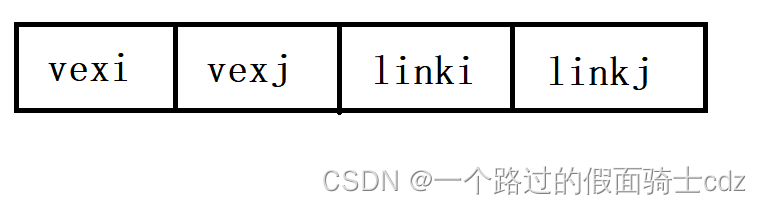
边结点结构 :

这样,十字链表结构类似于下图:
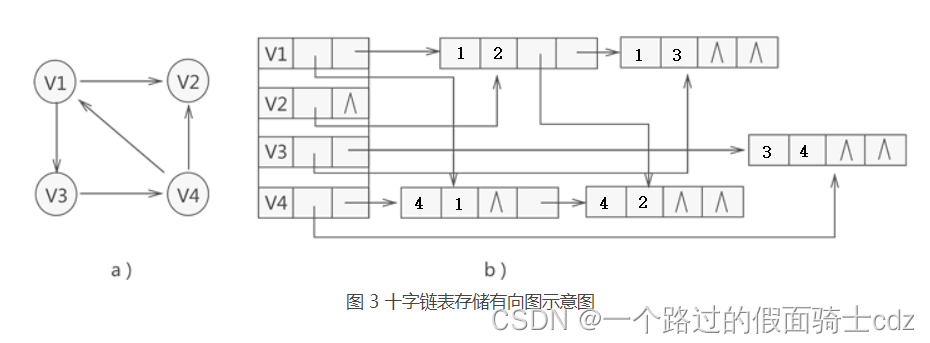
空间复杂度为O(n+e)。
4.邻接多重表
邻接多重表适用于无向图,其相较于邻接矩阵作用是不用对一条边存储两次。
顶点结构如下:
边表结构,vexi表示顶点i,vexj表示顶点j,说明存在i和j之间相连的一条边。
linki是与i相连的下一条边,linkj是与j相连的下一条边。
因此,多重链表结构类似于下图:
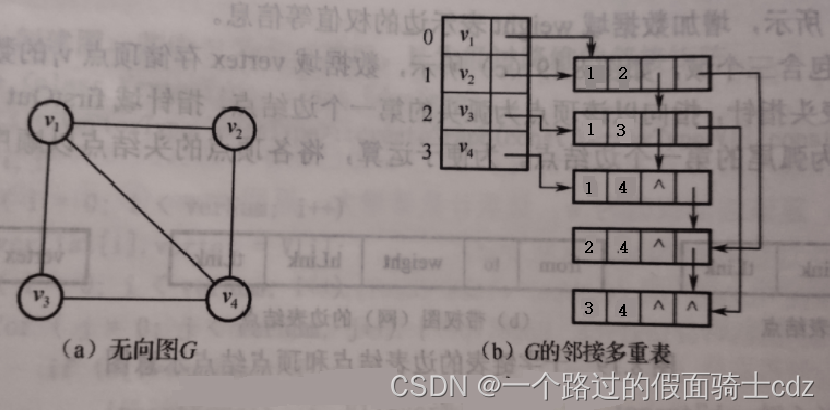
空间复杂度为O(n+e)。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 15
15 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)