Python 数据分析必备:NumPy 基础教程(含代码示例)
NumPy是Python中强大的数值计算库,核心数据结构是ndarray多维数组。本文介绍了NumPy的创建方法(如arange、ones、随机数组等)、数组属性(shape、dtype等)和操作(类型转换、形状变换、拼接分割等)。重点讲解了索引切片技巧和增删改查操作,包括一维/二维数组的位置索引、布尔索引等。这些功能使NumPy成为科学计算和数据处理的高效工具。
NumPy 背景与核心概念
矩阵与数组
矩阵是数学中按长方阵列排列的复数或实数集合,NumPy 中矩阵是二维数组的特殊形式,但通常直接使用更通用的 ndarray(N维数组)。ndarray 是 NumPy 的核心数据结构,支持高效的多维数据操作。
性能优势
NumPy 的底层由 C 语言实现,相比纯 Python 代码,其数组操作速度显著更快,尤其适合大规模数值计算。
数据类型
NumPy 仅有一种核心数据类型 ndarray,但支持多种元素类型(如 int32、float64 等),通过 dtype 属性指定。
1.创建 ndarray 的方法
通过 Python 序列
(1) 通过 Python 序列创建
# 一维数组
arr1 = np.array([1, 2, 3]) # 列表
arr2 = np.array((4, 5, 6)) # 元组
输出结果:
[1 2 3]
[4 5 6]
# 二维数组
arr3 = np.array([[1, 2], [3, 4]]) # 嵌套列表
arr4 = np.array([(1, 2), (3, 4)]) # 嵌套元组
arr5 = np.array([[1, 2], (3, 4)]) # 混合嵌套
输出结果:
[[1 2]
[3 4]]
[[1 2]
[3 4]]
[[1 2]
[3 4]]
# 多维数组
arr6 = np.array([[[1, 2], [3, 4]], [[5, 6], [7, 8]]]) # 3D数组
print(arr6)
输出结果:
[[[1 2]
[3 4]]
[[5 6]
[7 8]]]
NumPy 内置函数
① np.arange()
# np.arange(stop): [0, stop)左闭右开区间
arr = np.arange(5) # [0, 1, 2, 3, 4]
# np.arange(start, stop): [start, stop)左闭右开区间
arr = np.arange(2, 6) # [2, 3, 4, 5]
# np.arange(start, stop, step) step为步长
arr = np.arange(1, 10, 2) # [1, 3, 5, 7, 9]
② np.ones() 全 1 数组
# 默认 float64
arr = np.ones((2, 3)) #创建2行3列的值全为1数组
# [[1., 1., 1.],
# [1., 1., 1.]]
# 指定数据类型
arr = np.ones((2, 2), dtype='int32') # [[1, 1], [1, 1]]
③ np.zeros() 全 0 数组
#创建3行2列的值全为0数组
arr = np.zeros((3, 2)) # [[0., 0.], [0., 0.], [0., 0.]]
arr_str = np.zeros(3, dtype=str) # ['', '', '']转换成字符串格式
④ np.eye() 单位数组
arr = np.eye(3) # 3x3 单位矩阵(对角线元素都为1)
# [[1., 0., 0.],
# [0., 1., 0.],
# [0., 0., 1.]]
⑤ 随机数组
# 0-1 随机小数
arr = np.random.random((2, 2))
# [[0.123, 0.456],
# [0.789, 0.321]]
# 随机整数 [low, high)
arr = np.random.randint(0, 10, size=(2, 3)) # size=(2, 3)指定形状为2行3列的数组
# [[3, 7, 2],
# [8, 1, 9]]
# 均匀分布随机小数
arr = np.random.uniform(1.0, 5.0, size=3) # [2.34, 4.56, 1.23] 生成3个1-5之间的随机小数
⑥ 等差数组 np.linspace()
# 生成 5 个从 0 到 10 的等差数列(包含端点)
arr = np.linspace(0, 10, 5) # [ 0. , 2.5, 5. , 7.5, 10. ]
# 不包含端点
arr = np.linspace(0, 10, 5, endpoint=False) # [0., 2., 4., 6., 8.]
# 返回步长
arr, step = np.linspace(0, 10, 5, retstep=True) # step=2.5
2.数组属性与操作
常用属性
arr = np.array([[1, 2, 3], [4, 5, 6]])
print(arr.shape) # (2, 3) # 形状(行数,列数)
print(arr.ndim) # 2 # 维度
print(arr.size) # 6 # 元素总数
print(arr.dtype) # int32 # 数据类型
类型转换
arr = np.array([1.5, 2.7, 3.2])#将浮点型改变为'int32'整数型数组
arr_int = arr.astype('int32') # [1, 2, 3]
形状操作
arr = np.arange(12).reshape(3, 4)#reshape形状为3行4列
# [[ 0, 1, 2, 3],
# [ 4, 5, 6, 7],
# [ 8, 9, 10, 11]]
# 打乱数组
np.random.shuffle(arr) # 行顺序随机打乱
输出结果:
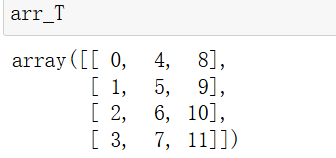
# 转置
arr_T = arr.T # 行列互换
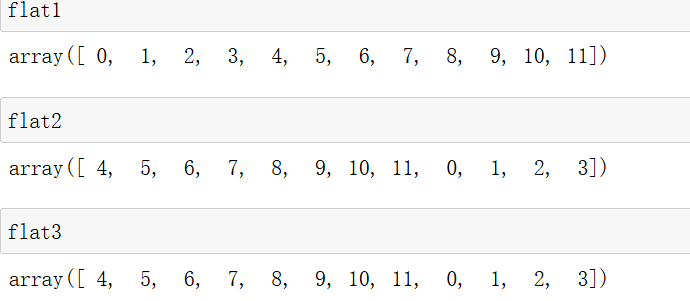
# 打平为一维数组
flat1 = arr.flatten() # 返回副本
flat2 = arr.ravel() # 返回视图(修改会影响原数组)
flat3 = arr.reshape(-1) # 同 ravel()
数组拼接与分割
- (1)拼接:
a = np.array([[1, 2], [3, 4]])
b = np.array([[5, 6]])
# 垂直拼接(列数相同)
v_stack = np.vstack((a, b))
# [[1, 2],
# [3, 4],
# [5, 6]]
# 水平拼接(行数相同)
h_stack = np.hstack((a, b.T))
#b.T=[[5],
# [6]]
# [[1, 2, 5],
# [3, 4, 6]]
# 按维度拼接(升维)
stack = np.stack((a, b), axis=0) # shape=(2, 3, 2)
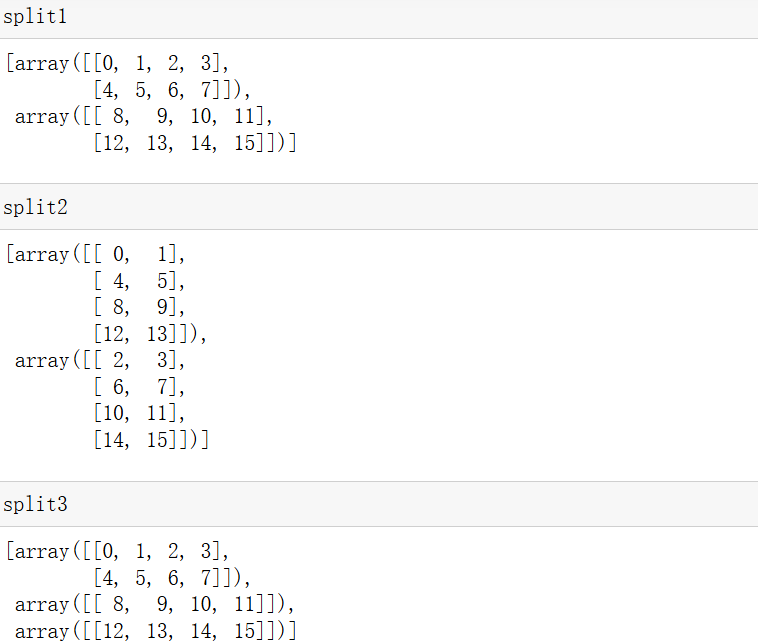
- (2)分割:
arr = np.arange(16).reshape(4, 4)
# 按行均分
split1 = np.vsplit(arr, 2) # 分成两个 2x4 数组
# 按列均分
split2 = np.hsplit(arr, 2) # 分成两个 4x2 数组
# 不均等分割
split3 = np.array_split(arr, 3, axis=0) # 分成 3 组(前多后少)
3.索引与切片
基础操作
位置索引:0,1,2,3,4…(从0开始)
(1)一维数组
arr = np.array([0, 1, 2, 3, 4, 5, 6, 7, 8, 9])
# 基本切片
print(arr[2:5]) # 输出: [2 3 4] (索引2到4)
print(arr[:4]) # 输出: [0 1 2 3] (从开始到索引3)
print(arr[5:]) # 输出: [5 6 7 8 9] (索引5到结束)
print(arr[::2]) # 输出: [0 2 4 6 8] (步长为2)
print(arr[::-1]) # 输出: [9 8 7 6 5 4 3 2 1 0] (反转数组)
(2)二维数组
arr = np.array([[1, 2, 3], [4, 5, 6], [7, 8, 9]])
# 索引
print(arr[0, 1]) # 2 # 第0行第1列
# 切片
print(arr[1, :]) # [4, 5, 6] # 第1行所有列
print(arr[:, 2]) # [3, 6, 9] # 所有行第2列
print(arr[0:2, 0:2]) # [[1, 2], [4, 5]] # 左上角2x2区域
# 不连续索引
print(arr[[0, 2], [1, 2]]) # [2, 9] # (0,1)和(2,2)位置的元素
# 布尔索引
mask = arr > 5
print(arr[mask]) # [6, 7, 8, 9] # 所有大于5的元素
4.增删改查与统计
增删操作
arr = np.array([[1, 2], [3, 4]])
# 增(添加行)
new_row = np.array([[5, 6]])
arr = np.vstack((arr, new_row)) # [[1,2], [3,4], [5,6]]
# 删(删除第0行)
arr = np.delete(arr, 0, axis=0) # [[3,4], [5,6]]
# 查(定位值)
print(arr[1, 1]) # 6
# 改(修改值)
arr[0, 0] = 10 # [[10,4], [5,6]]
统计函数
对于二维数组:
axis=0:表示沿着垂直方向(即按列)进行操作,即对每一列进行统计。
axis=1:表示沿着水平方向(即按行)进行操作,即对每一行进行统计。
arr = np.array([[1, 2, 3], [4, 5, 6]])
# 全局统计
print(np.sum(arr)) # 21
print(np.mean(arr)) # 3.5
print(np.std(arr)) # 1.7078 # 标准差
print(np.var(arr)) # 2.9167 # 方差
# 按行/列统计
print(np.sum(arr, axis=1)) # [ 6, 15] # 每行求和
print(np.max(arr, axis=0)) # [4, 5, 6] # 每列最大值
# 累计操作
print(np.cumsum(arr)) # [ 1, 3, 6, 10, 15, 21]
print(np.cumprod(arr)) # [ 1, 2, 6, 24, 120, 720]
5.特殊值与运算
NaN 与 Inf
1.nan (Not a Number)
nan 是一个特殊的浮点值,表示“不是一个数字”。它通常出现在以下情况:
(1)0 除以 0
(2)nan 参与的任何运算
(3)读取的外部数据中有缺失值
(4)负数的平方根(在实数范围内)
(5) 对负数取对数 使用 np.isnan() 函数可以检测数组中的 nan 值。
# 0 除以 0
result = 0 / 0.0 # 在 NumPy 中会得到 nan
print(result) # nan
# 无穷大减去无穷大
inf = np.inf
result = inf - inf
print(result) # nan
# 负数的平方根
result = np.sqrt(-1)
print(result) # nan (并会给出警告)
# 任何涉及 nan 的运算
result = np.nan + 10
print(result) # nan
arr = np.array([1, np.nan, 3, np.nan])
print(np.isnan(arr))
# 输出: [False True False True]
在数据分析中,我们通常需要填充或删除 nan 值。 常见方法:
- 用均值、中位数等填充
- 删除包含 nan 的行或列
arr = np.array([1, np.nan, 3, np.nan])
mean_val = np.nanmean(arr) # 计算均值时忽略 nan
print(mean_val) # 2.0
arr[np.isnan(arr)] = mean_val # 将 nan 替换为均值
print(arr) # [1. 2. 3. 2.]
2.inf (Infinity)
inf 表示无穷大,分为正无穷(np.inf)和负无穷(-np.inf)。它通常出现在以下情况:
(1)非零数除以 0
(2)超出浮点数表示范围的上限(溢出)
(3)对 0 取对数(负无穷)
# 正数除以0
result = 1.0 / 0.0
print(result) # inf
# 负数除以0
result = -1.0 / 0.0
print(result) # -inf
# 超出浮点数表示范围
result = 1e308 * 10 # 1e308 已经接近浮点数最大值,乘以10溢出
print(result) # inf
# 对0取对数
result = np.log(0)
print(result) # -inf
#使用 np.isinf() 函数可以检测数组中的无穷大值(包括正无穷和负无穷)。
arr = np.array([1, np.inf, -np.inf, 3])
print(np.isinf(arr))
# 输出: [False True True False]
注意事项:
nan 和 inf 都是浮点数类型,因此整数数组中不会出现它们(除非转换为浮点数)。
nan 与任何值(包括自身)比较都返回 False,因此检测 nan 必须使用 np.isnan()。
print(np.nan == np.nan) # False
算术与广播
(1)算术函数
arr = np.array([1.2, -2.7, 3.5])
# 向上/向下取整
print(np.ceil(arr)) # [ 2., -2., 4.]
print(np.floor(arr)) # [ 1., -3., 3.]
# 四舍五入
print(np.rint(arr)) # [ 1., -3., 4.]
# 绝对值
print(np.abs(arr)) # [1.2, 2.7, 3.5]
# 条件选择
print(np.where(arr > 0, arr, 0)) # [1.2, 0., 3.5] # 正数保留,负数变0
(2)广播机制
广播(Broadcasting)是 NumPy 的核心特性之一,它允许不同形状的数组进行算术运算,而无需显式复制数据。以下是广播机制的详细解释和示例:
广播核心规则
- 1.维度对齐:从最右边的维度开始向左比较
- 2.尺寸匹配: 满足以下任一条件即可广播
维度尺寸相等
其中一个维度尺寸为 1
其中一个维度不存在(自动补 1) - 3.扩展方式:尺寸为 1 的维度会自动复制扩展
示例 1:一维数组与二维数组
a = np.array([[1, 2, 3], [4, 5, 6]]) # shape (2,3)
b = np.array([10, 20, 30]) # shape (3,) → 视为 (1,3)
# 广播过程:
# b 的形状 (1,3) → 扩展为 (2,3)
# [[10, 20, 30],
# [10, 20, 30]]
print(a + b)
# 输出:
# [[11, 22, 33],
# [14, 25, 36]]
示例 2:列向量与二维数组
c = np.array([[100], [200]]) # shape (2,1)
# 广播过程:
# c 的形状 (2,1) → 扩展为 (2,3)
# [[100, 100, 100],
# [200, 200, 200]]
print(a * c)
# 输出:
# [[100, 200, 300],
# [400, 500, 600]]
- 广播本质:自动扩展维度以匹配形状
- 核心规则:从右向左比较维度,尺寸为1或缺失的维度可扩展
- 应用场景:
向量与矩阵运算
标量与数组运算
数据归一化
条件筛选
6.字符串处理
数组操作
arr = np.array(['hello', 'world'])
# 拼接
print(np.char.add(arr, '!')) # ['hello!', 'world!']
# 重复
print(np.char.multiply(arr, 2)) # ['hellohello', 'worldworld']
# 大小写转换
print(np.char.upper(arr)) # ['HELLO', 'WORLD']
print(np.char.capitalize(arr)) # ['Hello', 'World']
# 分割
print(np.char.split(arr[0], sep='l')) # [['he', '', 'o']]
# 替换
print(np.char.replace(arr[0], 'l', 'x')) # 'hexxo'
总结
以上内容涵盖 NumPy 的核心功能,适用于科学计算、数据分析等领域。NumPy 是数据分析的基石,掌握其核心操作(数组创建、索引、广播、统计函数)是高效处理数据的关键。通过上述示例,初学者可系统理解 NumPy 的功能并应用于实际场景。建议结合 Jupyter Notebook 逐步运行代码,观察输出结果加深理解。通过灵活组合这些操作,可高效处理多维数据。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 13
13 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)