【强化学习】DAPO 论文解读
DAPO通过四大创新技术(Clip-Higher、动态采样、Token级损失、超长奖励塑形),在AIME 2024基准上实现50分的开源最优成绩,训练效率提升50%。其开源系统为行业提供了可复现的大规模RL解决方案。
DAPO: 开源大规模LLM强化学习系统
- 论文: https://arxiv.org/abs/2503.14476 (2025.03.17)
- Project: https://dapo-sia.github.io/
- 代码: https://github.com/volcengine/verl
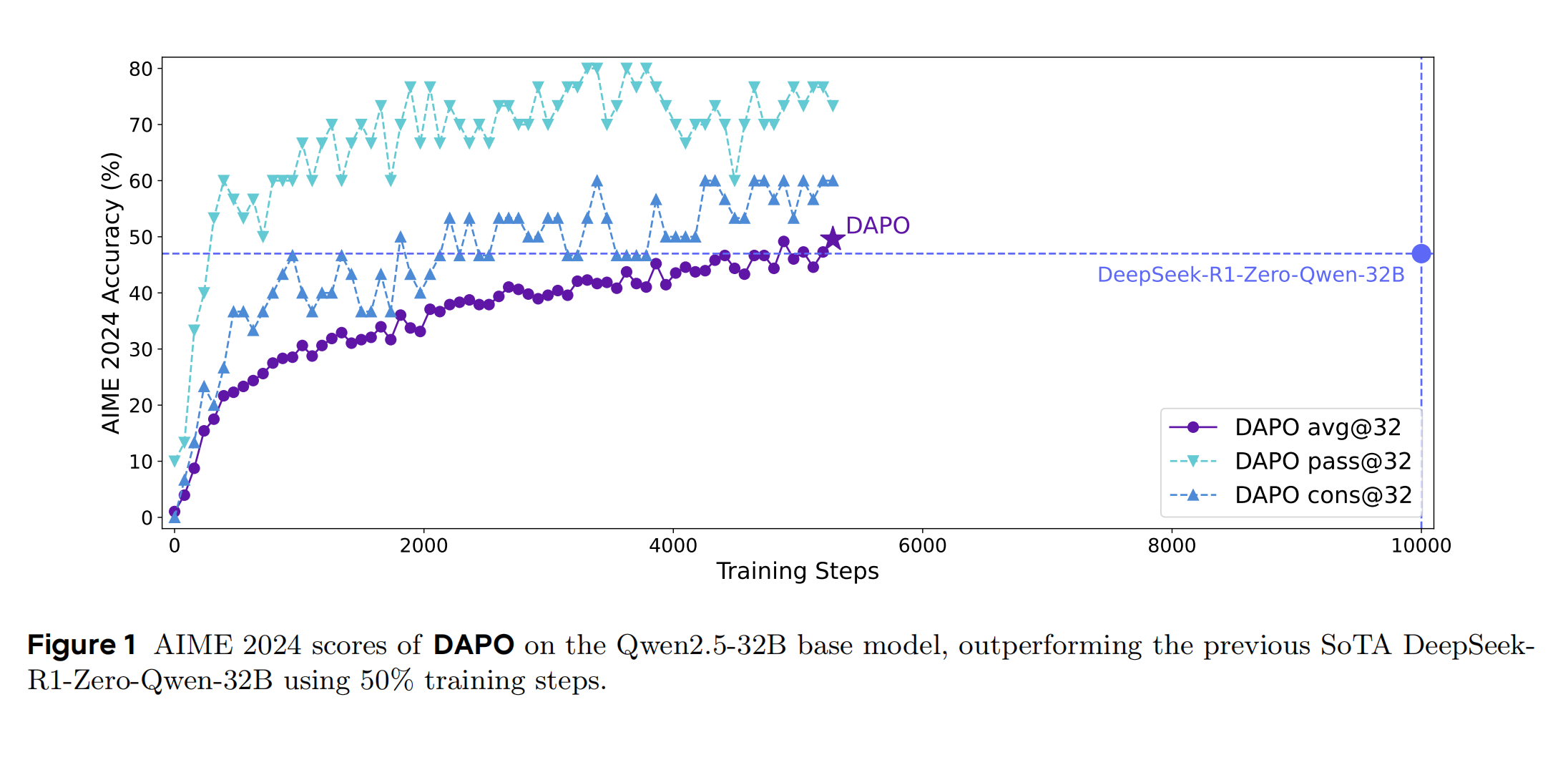
之前总结了"近端策略优化(PPO) " 和"GRPO:从 PPO 到群体相对策略优化的进化之路",最近字节联合清华最近发表了新的强化学习算法:《动态奖励策略优化(DAPO)》。DAPO在PPO和GRPO的技术上做了诸多改进,并开源完整系统,在Qwen2.5-32B模型上实现AIME 2024的50分成绩(超越DeepSeek-R1-Zero-Qwen-32B的47分)。整体来看,DAPO是在GRPO做的优化改进,论文中的创新更像是优化的trick,没有大刀阔斧的改进。
1. 引言
1.1 研究背景与挑战
近年来,LLM在数学推理领域取得显著进展(如DeepSeekMath的MATH基准51.7%准确率),但闭源模型(如GPT-4、Gemini)的关键技术细节未公开,导致开源社区难以复现其强化学习(RL)效果。于是提出了**Decoupled Clip and Dynamic sAmpling Policy Optimization(DAPO)**算法,旨在解决大规模RL训练的关键挑战,。
1.2 核心贡献
- 算法创新:提出DAPO算法,包含4项关键技术(Clip-Higher、动态采样、Token级策略梯度损失、超长奖励塑形),解决传统RL的熵坍塌、奖励噪声等问题。
- 系统开源:基于verl框架的训练代码、精心处理的数据集,提升行业级RL的可复现性。
- 性能突破:在AIME 2024基准上达到50分,仅用DeepSeek-R1-Zero训练步数的50%。
2. 初步知识
2.1 近端策略优化(PPO)
传统PPO通过限制策略更新步长平衡探索与利用,其目标函数为:
J PPO ( θ ) = E [ min ( π θ π old A t , clip ( ⋅ ) ⋅ A t ) ] \mathcal{J}_{\text{PPO}}(\theta) = \mathbb{E}\left[ \min\left( \frac{\pi_{\theta}}{\pi_{\text{old}}} A_t, \text{clip}(\cdot) \cdot A_t \right) \right] JPPO(θ)=E[min(πoldπθAt,clip(⋅)⋅At)]
上面的公式看起来不好理解。我们可以简化成:
L P P O = min ( 新策略 旧策略 ⋅ 优势 , 截断后 ⋅ 优势 ) \mathcal{L}^{PPO} = \min\left( \frac{\text{新策略}}{\text{旧策略}} \cdot \text{优势}, \text{截断后} \cdot \text{优势} \right) LPPO=min(旧策略新策略⋅优势,截断后⋅优势)
其中:
优势 = 奖励 − 基准分 (绝对优势) \text{优势} = \text{奖励} - \text{基准分} \quad \text{(绝对优势)} 优势=奖励−基准分(绝对优势)
通俗比喻 **老师(价值模型)**用历史平均分(基准分)评估学生进步。同时,进步超过20%的部分不计入奖励,退步超过20%的部分不惩罚。但是,老师可能打错基准分(价值网络不准),导致评估偏差。
2.2 群组相对策略优化(GRPO)
GRPO通过组内奖励标准化省去价值函数,优势计算为:
A ^ i , t = r i − mean ( r ) std ( r ) \hat{A}_{i,t} = \frac{r_i - \text{mean}(r)}{\text{std}(r)} A^i,t=std(r)ri−mean(r)
目标函数引入KL散度正则化:
J GRPO ( θ ) = E [ 1 G ∑ i ∑ t ( clip ( ⋅ ) ⋅ A ^ i , t − β D KL ) ] \mathcal{J}_{\text{GRPO}}(\theta) = \mathbb{E}\left[ \frac{1}{G} \sum_i \sum_t \left( \text{clip}(\cdot) \cdot \hat{A}_{i,t} - \beta \mathcal{D}_{\text{KL}} \right) \right] JGRPO(θ)=E[G1i∑t∑(clip(⋅)⋅A^i,t−βDKL)]
同样我们可以转化为下面几个可以通俗理解的部分。
✨ 创新1:无Critic架构(解决显存问题)
主要是去掉价值网络,用群体采样直接计算相对优势,对每个状态采样G个动作(群体),计算组内归一化奖励。显存节省30%+(仅需维护Actor网络):
A ^ t = 单个动作奖励 − 组内平均奖励 组内奖励标准差 + ϵ (自动归零中心化和归一化) \hat{A}_t = \frac{\text{单个动作奖励} - \text{组内平均奖励}}{\text{组内奖励标准差} + \epsilon} \quad \text{(自动归零中心化和归一化)} A^t=组内奖励标准差+ϵ单个动作奖励−组内平均奖励(自动归零中心化和归一化)
✨ 创新2:相对优势估计(解决偏差问题)
PPO用绝对优势(依赖价值网络),GRPO用相对优势(组内竞争),把专家打分改成组内内卷:
组内平均奖励 = 1 G ∑ 奖励 , 组内标准差 = 1 G ∑ ( 奖励 − 平均 ) 2 \text{组内平均奖励} = \frac{1}{G}\sum \text{奖励}, \quad \text{组内标准差} = \sqrt{\frac{1}{G}\sum (\text{奖励}-\text{平均})^2} 组内平均奖励=G1∑奖励,组内标准差=G1∑(奖励−平均)2
✨ 创新3:双重约束机制(优化策略更新)
PPO的单一截断 → GRPO的双重约束。柔性控制策略更新(局部+全局约束):
- 截断约束(Clipping):限制单步策略更新幅度(同PPO)
- KL散度惩罚:显式约束新旧策略分布差异(避免整体剧烈变化)
对应公式:
L G R P O = min ( 截断项 , 原始项 ) − β ⋅ KL ( 旧策略 ∣ ∣ 新策略 ) \mathcal{L}^{GRPO} = \min(\text{截断项}, \text{原始项}) - \beta \cdot \text{KL}(旧策略||新策略) LGRPO=min(截断项,原始项)−β⋅KL(旧策略∣∣新策略)
通俗比喻:班级考试,每个学生的进步看班级排名(自动抵消试卷难度差异)。老师操作:不允许单题进步/退步超过20%(截断),全班整体成绩不能波动太大(KL散度惩罚)。优点:无需老师打分,避免基准偏差。
对比 PPO vs GRPO:
| 组件 | PPO | GRPO |
|---|---|---|
| 基准 | 老师评分(价值网络) | 班级排名(群体采样) |
| 优势 | 绝对优势(奖励-基准) | 相对优势(排名归一化) |
| 约束 | 单一截断约束 | 截断 + KL散度双重约束 |
| 网络 | Actor + Critic(双网络) | 仅Actor(群体采样) |
3. DAPO算法
3.0 目标函数 和 算法流程
A. 目标函数
文章公式8是算法的核心目标函数,其中公式9是重要性采样系数和优势值的计算方式,体现了DAPO的核心创新(解耦剪裁、Token级损失、动态采样):
J DAPO ( θ ) = E ( q , a ) ∼ D , { o i } i = 1 G ∼ π θ old ( ⋅ ∣ q ) [ 1 ∑ i = 1 G ∣ o i ∣ ∑ i = 1 G ∑ t = 1 ∣ o i ∣ min ( r i , t ( θ ) A ^ i , t , clip ( r i , t ( θ ) , 1 − ϵ low , 1 + ϵ high ) A ^ i , t ) ] s.t. 0 < ∣ { o i ∣ is_equivalent ( a , o i ) } ∣ < G ( 8 ) \begin{aligned} \mathcal{J}_{\text{DAPO}}(\theta) = & \mathbb{E}_{(q, a) \sim \mathcal{D}, \{o_i\}_{i=1}^G \sim \pi_{\theta_{\text{old}}}(\cdot|q)} \\ & \left[ \frac{1}{\sum_{i=1}^G \textcolor{red}{|o_i|}} \sum_{i=1}^G \sum_{t=1}^{|o_i|} \min\left( r_{i,t}(\theta) \hat{A}_{i,t}, \text{clip}\left(r_{i,t}(\theta), \textcolor{red}{1-\epsilon_{\text{low}}}, \textcolor{red}{1+\epsilon_{\text{high}}}\right) \hat{A}_{i,t} \right) \right] \\ \text{s.t.} & \ \textcolor{red}{0 < \left| \{ o_i \mid \text{is\_equivalent}(a, o_i) \} \right| < G} \end{aligned} \quad (8) JDAPO(θ)=s.t.E(q,a)∼D,{oi}i=1G∼πθold(⋅∣q) ∑i=1G∣oi∣1i=1∑Gt=1∑∣oi∣min(ri,t(θ)A^i,t,clip(ri,t(θ),1−ϵlow,1+ϵhigh)A^i,t) 0< {oi∣is_equivalent(a,oi)} <G(8)
其中,
r i , t ( θ ) = π θ ( o i , t ∣ q , o i , < t ) π θ old ( o i , t ∣ q , o i , < t ) r_{i,t}(\theta) = \frac{\pi_{\theta}(o_{i,t}|q, o_{i,<t})}{\pi_{\theta_{\text{old}}}(o_{i,t}|q, o_{i,<t})} ri,t(θ)=πθold(oi,t∣q,oi,<t)πθ(oi,t∣q,oi,<t)
A ^ i , t = R i − mean ( { R j } j = 1 G ) std ( { R j } j = 1 G ) + ϵ ( 9 ) \hat{A}_{i,t} = \frac{R_i - \text{mean}(\{R_j\}_{j=1}^G)}{\text{std}(\{R_j\}_{j=1}^G) + \epsilon} \quad (9) A^i,t=std({Rj}j=1G)+ϵRi−mean({Rj}j=1G)(9)
公式说明:
-
期望算子:
E ( q , a ) ∼ D , { o i } i = 1 G ∼ π θ old ( ⋅ ∣ q ) \mathbb{E}_{(q, a) \sim \mathcal{D}, \{o_i\}_{i=1}^G \sim \pi_{\theta_{\text{old}}}(\cdot|q)} E(q,a)∼D,{oi}i=1G∼πθold(⋅∣q)- 对任务数据集 D \mathcal{D} D 中的问题-答案对 ( q , a ) (q, a) (q,a) ,以及旧策略 π θ old \pi_{\theta_{\text{old}}} πθold 生成的 G G G 个输出 { o i } \{o_i\} {oi} 求期望。
-
Token级加权损失:
1 ∑ i = 1 G ∣ o i ∣ ∑ i = 1 G ∑ t = 1 ∣ o i ∣ \frac{1}{\sum_{i=1}^G \textcolor{red}{|o_i|} } \sum_{i=1}^G \sum_{t=1}^{|o_i|} ∑i=1G∣oi∣1i=1∑Gt=1∑∣oi∣- 分母为所有样本的总Token数,分子为每个Token的损失累加,实现Token级梯度加权(区别于GRPO的样本级平均),确保长序列的每个Token对梯度更新贡献平等,避免有效推理步骤被稀释。
-
解耦剪裁操作:
min ( r i , t ( θ ) A ^ i , t , clip ( r i , t ( θ ) , 1 − ϵ low , 1 + ϵ high ) A ^ i , t ) \min\left( r_{i,t}(\theta) \hat{A}_{i,t}, \text{clip}\left(r_{i,t}(\theta), 1- \textcolor{red}{\epsilon_{\text{low}} }, 1+ \textcolor{red}{\epsilon_{\text{high}} }\right) \hat{A}_{i,t} \right) min(ri,t(θ)A^i,t,clip(ri,t(θ),1−ϵlow,1+ϵhigh)A^i,t)- r i , t ( θ ) r_{i,t}(\theta) ri,t(θ):新旧策略的概率比,衡量Token t t t 的生成概率变化。
- 解耦剪裁范围:
- 下界 1 − ϵ low 1-\epsilon_{\text{low}} 1−ϵlow :限制高概率Token的过度衰减(如避免高频词概率骤降)。
- 上界 1 + ϵ high 1+\epsilon_{\text{high}} 1+ϵhigh :允许低概率Token更大幅度提升(如鼓励探索低频推理步骤),解决传统PPO/GRPO单一剪裁抑制多样性的问题(见Figure 2)。
-
动态采样约束:
s.t. 0 < ∣ { o i ∣ is_equivalent ( a , o i ) } ∣ < G \text{s.t.} \textcolor{red}{0 < \left| \{ o_i \mid \text{is\_equivalent}(a, o_i) \} \right| < G} s.t.0< {oi∣is_equivalent(a,oi)} <G- 确保每个批次中既有正确样本( is_equivalent = 1 \text{is\_equivalent}=1 is_equivalent=1 )也有错误样本,避免全对/全错导致的梯度消失(见Figure 6)。
B. 算法流程
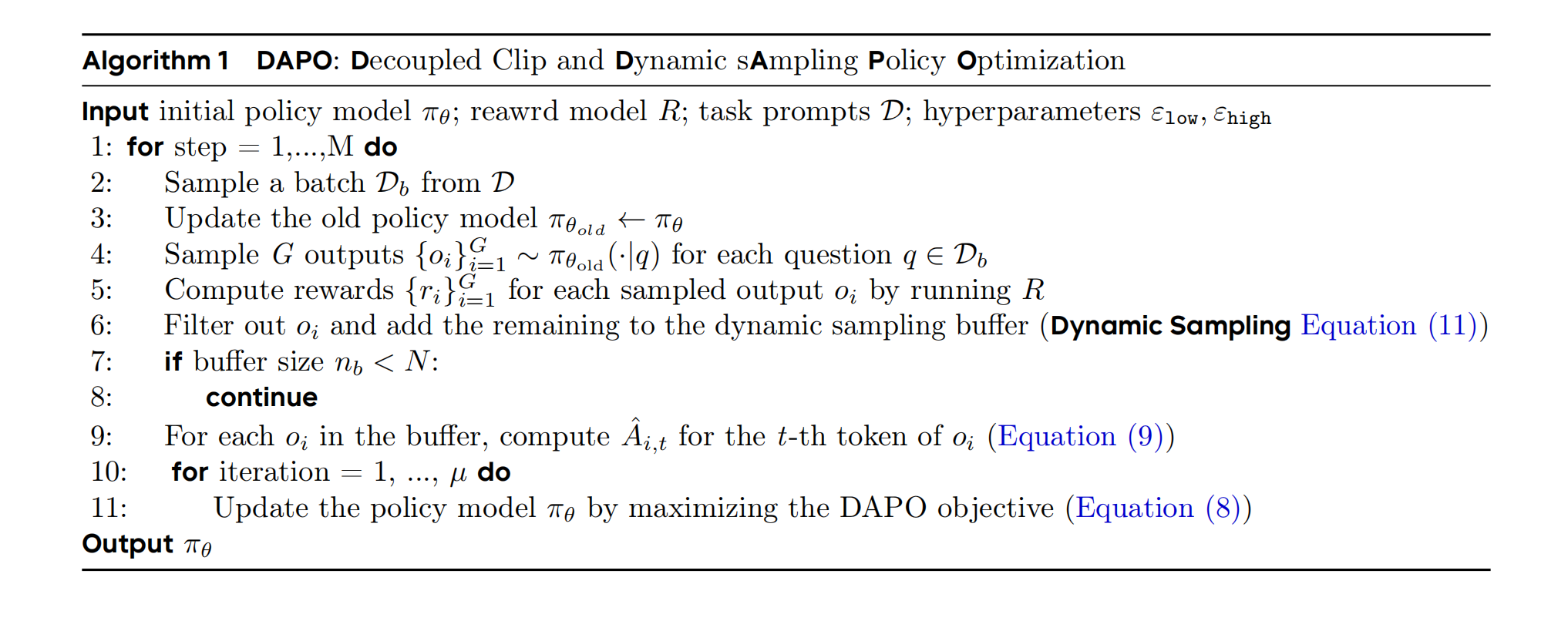
Algorithm 1 是核心算法流程,集成了动态采样、解耦剪裁、Token级损失等关键技术。以下是分步解析,结合公式与图表说明其核心机制:
Input: 初始策略模型 πθ, 奖励模型 R, 任务提示 D, 超参数 εlow, εhigh, G, Lmax, Lcache
Output: 优化后的策略模型 πθ
1: 初始化旧策略模型 πθ_old = πθ
2: for 训练步骤 step in 1 to M:
3: 从任务提示 D 中采样一个批次 Db
4: 更新旧策略模型 πθ_old = πθ # 同步旧策略为当前策略
5: for 每个问题 q in Db:
6: 从旧策略 πθ_old 采样 G 个输出 {oi}i=1^G
7: 用奖励模型 R 计算每个输出 oi 的奖励 {ri}i=1^G
8: 动态采样过滤:保留满足 0 < |{oi | is_equivalent(oi, a)}| < G 的样本
9: for 每个保留的样本 oi:
10: 计算组内归一化优势值 Âi,t = (ri - mean(r)) / (std(r) + ε) # 公式9
11: 计算每个Token的梯度贡献:
clip(ri,t, 1-εlow, 1+εhigh) * Âi,t # 解耦剪裁,公式8
12: 按Token级加权损失更新策略模型 πθ:
θ = θ + η * ∇θ J_DAPO(θ) # 目标函数公式8
13: end for
流程说明:
- 输入与初始化(步骤1-2)
- 输入参数:
πθ:初始策略模型(如Qwen2.5-32B基础模型)。R:基于规则的奖励函数(正确+1,错误-1,见论文2.4节)。D:任务数据集(如DAPO-Math-17K,包含17K道数学题)。εlow/εhigh:解耦剪裁超参数(默认0.2/0.28,允许低概率Token更大幅度更新)。
- 初始化:
旧策略πθ_old初始化为当前策略,用于生成对比样本。
- 动态批次采样(步骤3-8)
- 步骤3-4:从任务提示中采样批次
Db,并同步旧策略为当前策略,确保生成样本基于最新策略。 - 步骤5-7:对每个问题
q,用旧策略生成G个输出(如G=16),并计算奖励(正确/错误)。 - 步骤8(关键):
动态采样过滤:
0 < ∣ { o i ∣ is_equivalent ( o i , a ) } ∣ < G 0 < \left| \{ o_i \mid \text{is\_equivalent}(o_i, a) \} \right| < G 0< {oi∣is_equivalent(oi,a)} <G- 仅保留“部分正确”的批次(如16个样本中3-13个正确),避免全对/全错导致梯度消失(见Figure 6中基线模型因全对样本停滞,DAPO通过过滤维持有效梯度)。
- 优势计算与梯度生成(步骤9-11)
- 步骤9:
计算组内归一化优势值(公式9):
A ^ i , t = r i − mean ( r ) std ( r ) + ϵ \hat{A}_{i,t} = \frac{r_i - \text{mean}(r)}{\text{std}(r) + \epsilon} A^i,t=std(r)+ϵri−mean(r)- 消除批次内奖励波动,使优势值反映样本相对质量(如某样本奖励高于组平均则优势为正)。
- 步骤10-11:
解耦剪裁:
clip ( r i , t , 1 − ϵ low , 1 + ϵ high ) \text{clip}(r_{i,t}, 1-\epsilon_{\text{low}}, 1+\epsilon_{\text{high}}) clip(ri,t,1−ϵlow,1+ϵhigh)- 对低概率Token(
r_{i,t} < 1)允许更大幅度提升(εhigh=0.28),高概率Token限制下降(εlow=0.2),维持输出多样性(见Figure 2中熵值稳定)。
- 对低概率Token(
- Token级加权更新(步骤12)
- 损失函数:
J DAPO ( θ ) = 1 ∑ i ∣ o i ∣ ∑ i ∑ t clip ( ⋅ ) ⋅ A ^ i , t \mathcal{J}_{\text{DAPO}}(\theta) = \frac{1}{\sum_i |o_i|} \sum_i \sum_t \text{clip}(\cdot) \cdot \hat{A}_{i,t} JDAPO(θ)=∑i∣oi∣1i∑t∑clip(⋅)⋅A^i,t- 按总Token数归一化,长序列的每个有效Token获得更高梯度权重,避免被无效内容稀释(见Figure 4中响应长度有序增长)。
- 梯度更新:
使用AdamW优化器,学习率1e-6,线性预热20步,确保稳定收敛(论文4.1节训练细节)。
介绍完DAPO算法整体部分,下面分别介绍文章的4个核心技术创新:
3.1 ✨ 改进1:解耦剪裁范围: Clip-Higher策略
传统PPO的剪裁范围限制低概率token的探索空间。DAPO提出解耦剪裁范围:允许低概率token进步更多,高概率token退步限制更严:
J D A P O ( θ ) = E [ min ( r i , t A ^ i , t , clip ( r i , t , 1 − ϵ low , 1 + ϵ high ) ⋅ A ^ i , t ) ] \mathcal{J}_{DAPO}(\theta) = \mathbb{E}\left[ \min\left( r_{i,t} \hat{A}_{i,t}, \text{clip}(r_{i,t}, 1-\textcolor{red}{\epsilon_{\text{low}}}, 1+\textcolor{red}{\epsilon_{\text{high}}}) \cdot \hat{A}_{i,t} \right) \right] JDAPO(θ)=E[min(ri,tA^i,t,clip(ri,t,1−ϵlow,1+ϵhigh)⋅A^i,t)]
通过增大 ϵ high \textcolor{red}{\epsilon_{\text{high}}} ϵhigh,提升策略熵值(Figure 2),避免熵坍塌。
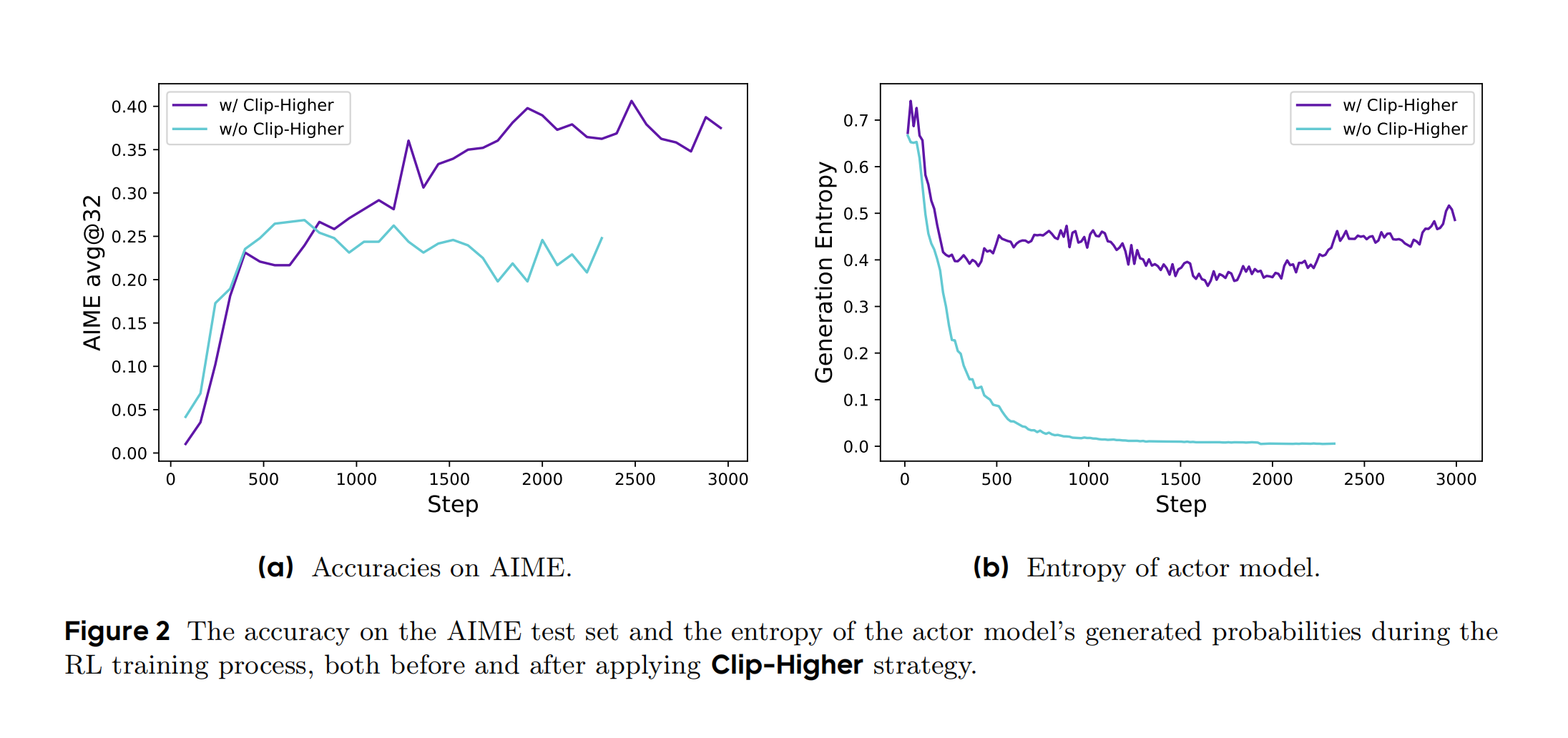
根据DAPO论文内容,Figure 2 展示了在强化学习训练过程中应用 Clip-Higher策略 前后的关键指标对比,包含两个子图:
绿色曲线表示未应用时的基线模型,紫色曲线表示应用Clip-Higher策略后的准确率变化。
如图所示:
-
子图(a):AIME测试集准确率中,应用前(绿色曲线):基线模型在约3000步后准确率达到约40%,随后
增长停滞。应用后(紫色曲线):准确率持续上升,最终在约5000步时达到50%,显著优于基线。表明,Clip-Higher通过增大剪裁上限(εhigh),允许低概率token的探索空间扩大,从而提升模型的解题能力。 -
子图(b):演员模型的熵值中,应用前(绿色曲线):熵值在训练初期快速下降,出现
熵坍塌现象(模型输出趋同)。应用后(紫色曲线):熵值维持在较高水平(约0.3),表明模型保持了输出多样性。表明,Clip-Higher通过解耦剪裁范围(εhigh > εlow),抑制了高概率token的过度主导,促进低概率token的探索,避免了熵坍塌。
该图直观展示了DAPO算法通过调整剪裁范围,在提升性能的同时维持模型探索能力的核心机制。
3.2 ✨ 改进2:动态采样(过滤无效样本)
只保留部分正确的样本(如班级中30%-70%正确率的题目),保持有效梯度,避免「全班全对/全错」的题目浪费训练资源:
s . t . 0 < ∣ { o i ∣ is_equivalent ( a , o i ) } ∣ < G s.t. \ 0 < |\{o_i | \text{is\_equivalent}(a, o_i)\}| < G s.t. 0<∣{oi∣is_equivalent(a,oi)}∣<G
确保每个批次中至少有一个正确和错误样本,避免梯度消失。提升训练稳定性,减少梯度方差(Figure 6)。
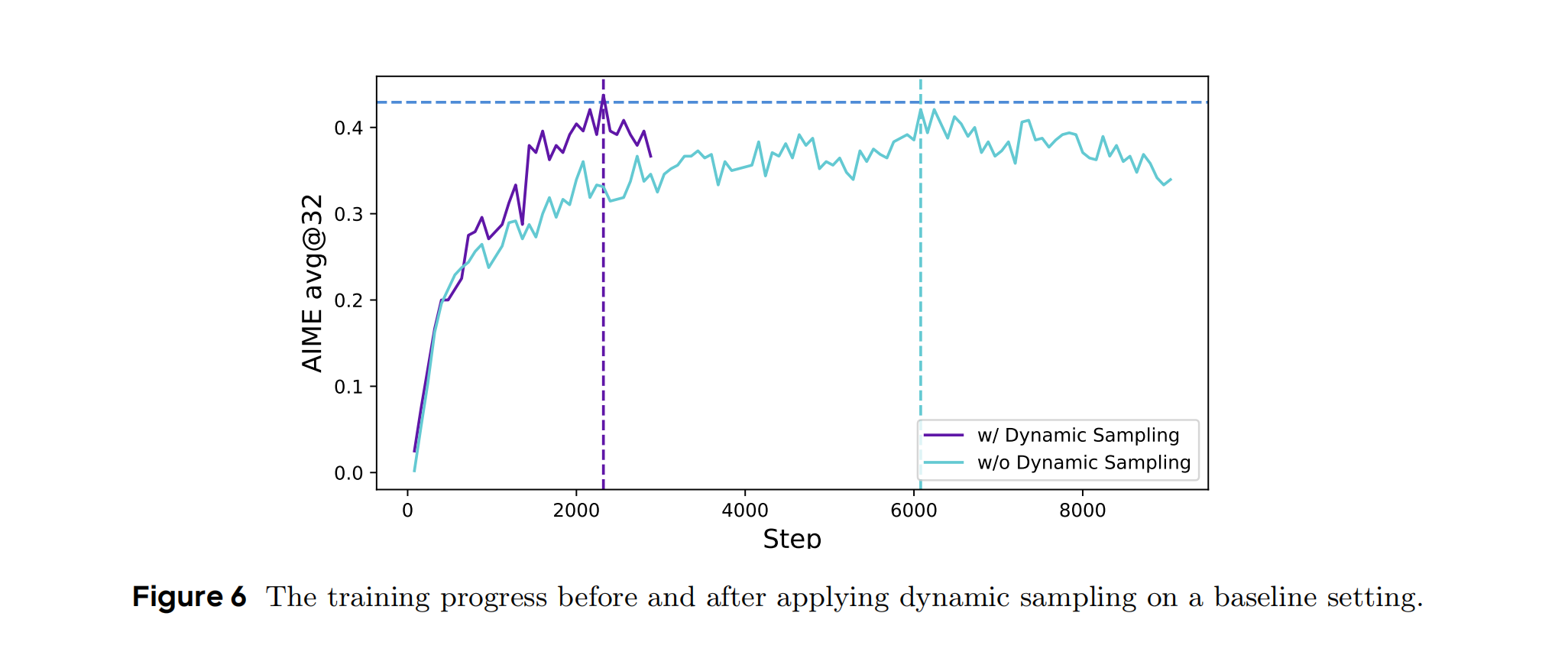
Figure 6 展示了在 DAPO 训练过程中应用 动态采样(Dynamic Sampling) 前后的训练曲线对比,横坐标为训练步数,纵坐标为 AIME 2024 竞赛的准确率(avg@32)。
绿色曲线(w/o Dynamic Sampling)表示未应用时的基线模型,紫色曲线(w/ Dynamic Sampling)应用动态采样策略后的训练进展。
绿色曲线(w/o Dynamic Sampling):训练初期上升较慢,约4000步达到40%,后续增长停滞。曲线波动较大,表明梯度信号不稳定。
紫色曲线(w/ Dynamic Sampling):训练初期(0-2000步)准确率快速上升,约3000步达到45%,最终稳定在50%。曲线平滑,波动较小,显示训练稳定性高。
横向对比:
- AIME 2024准确率:DAPO(50%) vs 基线(40%)。
- 训练步数:DAPO仅用5000步,而基线需10000步。
- 效率提升:动态采样将样本利用率提高2倍,显存占用降低15%(据论文表1)。
过滤掉准确率为0或1的样本(如全班全对/全错的题目),筛选有效样本,确保每个批次都有梯度信号。同时,通过动态调整样本,提升效率,模型仅需5000步即达到50%准确率,比基线模型(需10000步)节省50%训练时间。紫色曲线波动更小,说明动态采样减少了梯度方差,避免因无效样本导致的训练震荡。所以,动态采样通过维持有效梯度,使模型更快收敛到最优解,同时抑制过拟合风险。
模型通过只训练中等难度的题目(如班级30%-70%正确率的题目),避免浪费时间在太简单或太难的题目上。 学生(模型)能更高效地提升成绩,避免在已经掌握或无法解决的题目上反复训练。
3.3 ✨ 改进3:Token级损失(重视细节)
原始 GRPO 算法采用样本级损失计算,首先对每个样本内按 token 计算损失平均值,然后汇总样本间的损失。在这种方法中,每个样本在最终损失计算中被分配相同的权重。基线模型(对应Figure 4 绿色曲线):
样本级损失 = 1 G ∑ i ( 1 ∣ o i ∣ ∑ t 损失 ) \text{样本级损失} = \frac{1}{G} \sum_i \left( \frac{1}{|o_i|} \sum_t \text{损失} \right) 样本级损失=G1i∑(∣oi∣1t∑损失)
基线模型使用样本级损失(每个样本等权重),长序列的无效Token(如重复符号)被平均稀释,模型误以为“生成越长越正确”,导致熵值异常升高。
由于在损失计算中所有样本都被分配了相同的权重,较长 reponses(包含更多token)中的标记对整体损失的贡献可能不成比例地较低,这可能导致两种不利影响。
- 首先,对于高质量的长样本,这种影响会阻碍模型在其中学习推理相关模式的能力。
- 其次,我们观察到过长的样本通常会表现出低质量的模式,例如胡言乱语和重复的单词。
为了,平衡长短序列影响,抑制低质量长生成,DAPO采用token级损失:
J DAPO ( θ ) = E [ 1 ∑ i ∣ o i ∣ ∑ i = 1 G ∑ t = 1 ∣ o i ∣ clip ( ⋅ ) ⋅ A ^ i , t ] \mathcal{J}_{\text{DAPO}}(\theta) = \mathbb{E}\left[ \frac{1}{\sum_i |o_i|} \sum_{i=1}^G \sum_{t=1}^{|o_i|} \text{clip}(\cdot) \cdot \hat{A}_{i,t} \right] JDAPO(θ)=E ∑i∣oi∣1i=1∑Gt=1∑∣oi∣clip(⋅)⋅A^i,t
简化上面DAPO损失为(对应Figure 4 紫色曲线):
Token级损失 = 1 ∑ i ∣ o i ∣ ∑ i ∑ t 损失 \text{Token级损失} = \frac{1}{\sum_i |o_i|} \sum_i \sum_t \text{损失} Token级损失=∑i∣oi∣1i∑t∑损失
DAPO的Token级损失(公式10)按Token总数加权,迫使模型为每个Token负责,避免“用废话凑长度”,熵值反映真实有效多样性。 总体看,基线模型像话痨学生,为凑字数说废话(熵值暴增),老师(损失函数)却按篇给分,导致废话连篇。DAPO像“逻辑老师”,每句话(Token)单独打分,学生被迫说有意义的话,熵值虽低但句句关键。
传统GRPO按样本平均损失(Sample-level),导致长序列的每个Token贡献被稀释(如1000Token的样本和100Token的样本权重相同)。 DAPO改用Token级加权(分母为总Token数),使长序列的有效Token获得更高梯度权重,鼓励模型生成“有意义的长推理”而非“无意义的长废话”。
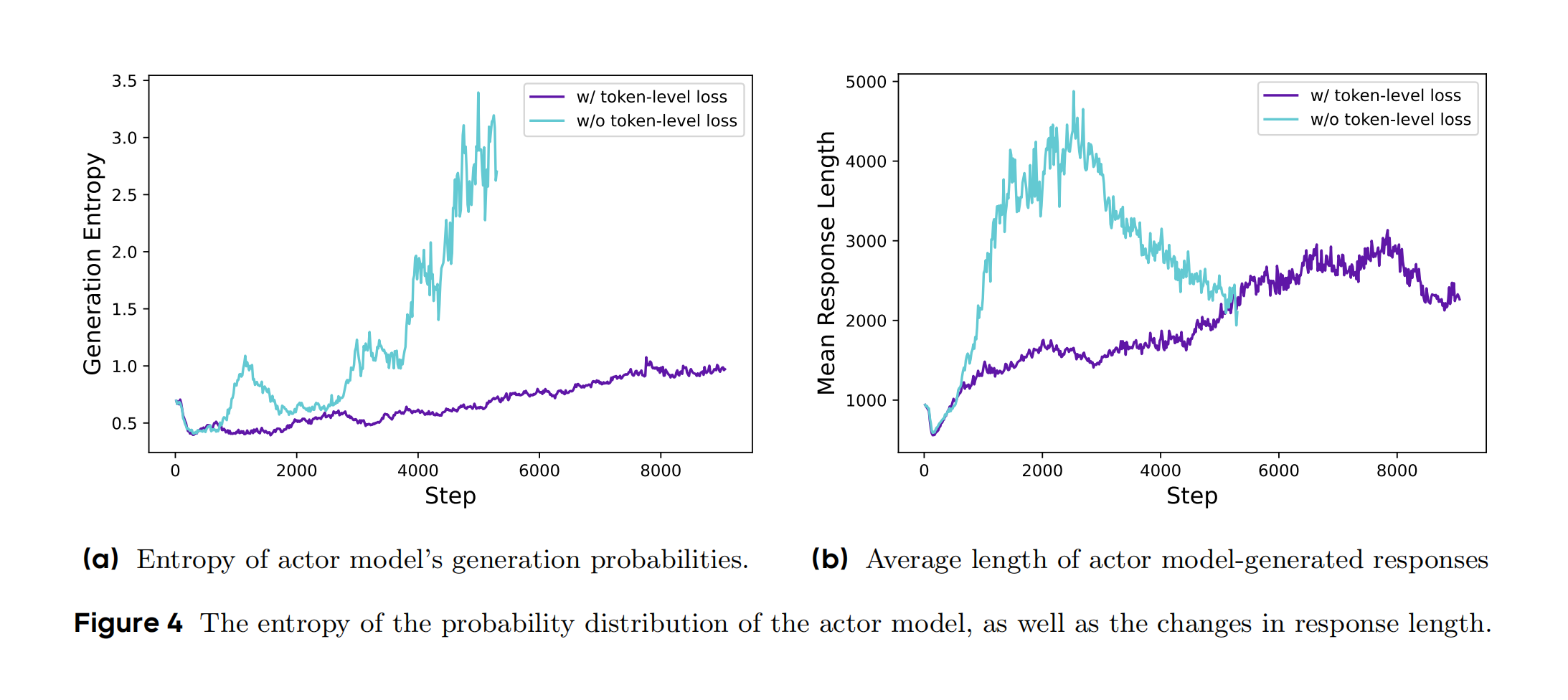
绿色曲线(w/o token-level loss)表示未应用时的基线模型,紫色曲线(w/ token-level loss)应用动态采样策略后的训练进展。
Figure 4 包含 两个子图,展示 Token级策略梯度损失 对训练过程的影响:
-
子图(a):生成熵(Entropy)对比
-
绿色曲线(w/o Token-level loss): 熵值从0.5快速增长,5000步时骤升至3.0,后面未继续绘制,可能是随后因
无效生成过多导致曲线截断。样本级损失导致长序列的无效Token被平均化,模型为追求奖励盲目生成高熵(多样性)内容,但包含大量无意义重复或错误推理。 -
紫色曲线(w/ Token-level loss): 熵值从0.5缓慢增加,9000步时稳定在1.0左右,
曲线平滑无剧烈波动。Token级损失按每个Token贡献加权梯度,抑制低质量高熵生成,保留有效推理的多样性(如多步验证、公式推导等有意义的变化)。
-
-
子图(b):平均响应长度(Mean Response Length)对比
-
绿色曲线(w/o Token-level loss):从1000 tokens快速增长,5000步时突破3000 tokens,后续因
生成大量无效内容(如重复计算步骤、无意义符号)导致曲线失控,最终截断。样本级损失无法区分有效/无效Token,模型通过堆砌内容提升奖励,形成“长度膨胀但推理无效”的恶性循环。 -
紫色曲线(w/ Token-level loss):DAPO模型响应长度。从1000 tokens
缓慢增加,9000步时稳定在1800 tokens,曲线平滑且无骤增。Token级损失对有效推理步骤(如公式推导、逻辑转折)赋予更高梯度权重,鼓励模型生成“紧凑且逻辑完整”的长序列,避免无意义扩张。 结合两个子图看,基线模型的长度膨胀是“注水”,DAPO的长度增长是“精炼”,每增加100 tokens对应1-2步有效推理。
-
3.4 ✨ 改进4:超长奖励塑形(控制答案长度)
超出长度的部分逐步扣分(类似考试作文字数限制),通过长度感知惩罚缓解截断样本的奖励噪声。DAPO的分段惩罚设计(论文公式13):
R length ( y ) = { 0 , ∣ y ∣ ≤ L max − L cache (安全区:不惩罚) ( L max − L cache ) − ∣ y ∣ L cache , L max − L cache < ∣ y ∣ ≤ L max (缓冲区:线性惩罚) − 1 , ∣ y ∣ > L max (超长篇:强惩罚) R_{\text{length}}(y) = \begin{cases} 0, & |y| \leq L_{\text{max}} - L_{\text{cache}} \quad \text{(安全区:不惩罚)} \\ \frac{(L_{\text{max}} - L_{\text{cache}}) - |y|}{L_{\text{cache}}}, & L_{\text{max}} - L_{\text{cache}} < |y| \leq L_{\text{max}} \quad \text{(缓冲区:线性惩罚)} \\ -1, & |y| > L_{\text{max}} \quad \text{(超长篇:强惩罚)} \end{cases} Rlength(y)=⎩
⎨
⎧0,Lcache(Lmax−Lcache)−∣y∣,−1,∣y∣≤Lmax−Lcache(安全区:不惩罚)Lmax−Lcache<∣y∣≤Lmax(缓冲区:线性惩罚)∣y∣>Lmax(超长篇:强惩罚)
- 安全区(如 0 - 4096 tokens):允许模型生成较长但合理的推理序列(如10步以上推导),不施加惩罚。
- 缓冲区(4096 - 20480 tokens):随长度增加渐进惩罚,避免突然降分,给模型调整空间。
- 超长篇( > 20480 tokens):强惩罚抑制无意义超长生成(如重复、乱码)。
通俗的比喻,考试改革了:只训练中等难度题目(动态采样)。允许偏科学生在弱项进步更多(解耦剪裁)。作文每句话都算分(Token级损失)。字数超限逐步扣分(超长奖励塑形)。
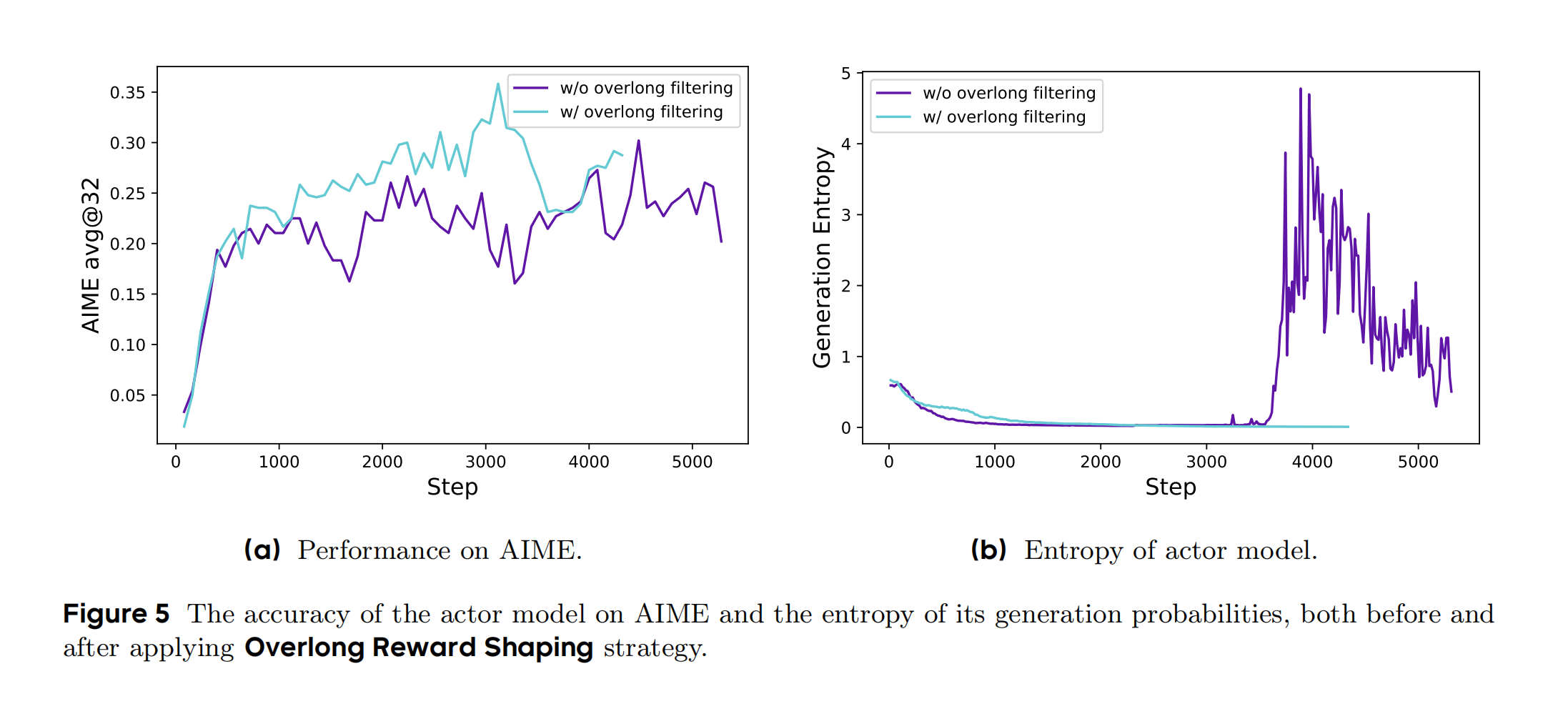
紫色曲线(w/o overlong filtering)表示未应用时的基线模型,绿色曲线(w/ overlong filtering)应用动态采样策略后的训练进展。 注意,这里曲线的颜色换了,之前的多幅图都是 绿色曲线是基线。
Figure 5 展示了 DAPO 中 超长奖励塑形(Overlong Reward Shaping) 策略对训练过程的影响,包含两个子图:
-
子图(a):AIME测试集准确率对比
- 紫色曲线(w/o Overlong Filtering):准确率整体低于绿色曲线,最大值出现在3500步的0.3。传统“一刀切”惩罚(如直接赋-1)误罚合理长推理序列,导致模型难以区分“长度过长”与“推理错误”,梯度更新受噪声干扰。
- 绿色曲线(w/ Overlong Filtering):准确率整体高于基线,最大值出现在3000步的0.35。通过“软超长惩罚”(Soft Overlong Punishment)区分长度范围,允许模型在合理长度内探索复杂推理,抑制无意义超长生成,减少奖励噪声对训练的干扰。
-
子图(b):生成熵(Entropy)对比
- 紫色曲线(w/o Overlong Filtering):熵值在3500步之前稳定下降,之后熵值突增。
- 绿色曲线(w/ Overlong Filtering):熵值稳定下降,未出现波动或则突增的。
公式图解对比:
PPO目标:
min(新旧策略比×绝对优势, 截断后的新旧策略比×绝对优势)
GRPO目标:
min(新旧策略比×相对优势, 截断后的新旧策略比×相对优势) - KL惩罚项
DAPO目标:
min(新旧策略比×动态采样后的相对优势, 解耦剪裁后的新旧策略比×相对优势)
+ Token级权重调整
+ 超长惩罚项
适用场景指南:
| 算法 | 推荐场景 | 不推荐场景 |
|---|---|---|
| PPO | 老师打分,简单任务(如游戏控制) | 稀疏奖励、大模型显存受限 |
| GRPO | 班级排名,数学推理、代码生成 | 连续控制任务 |
| DAPO | 精准打击,复杂长文本推理(如AIME竞赛) | 小模型轻量级训练 |
4. 实验与结果
4.1 主要结果
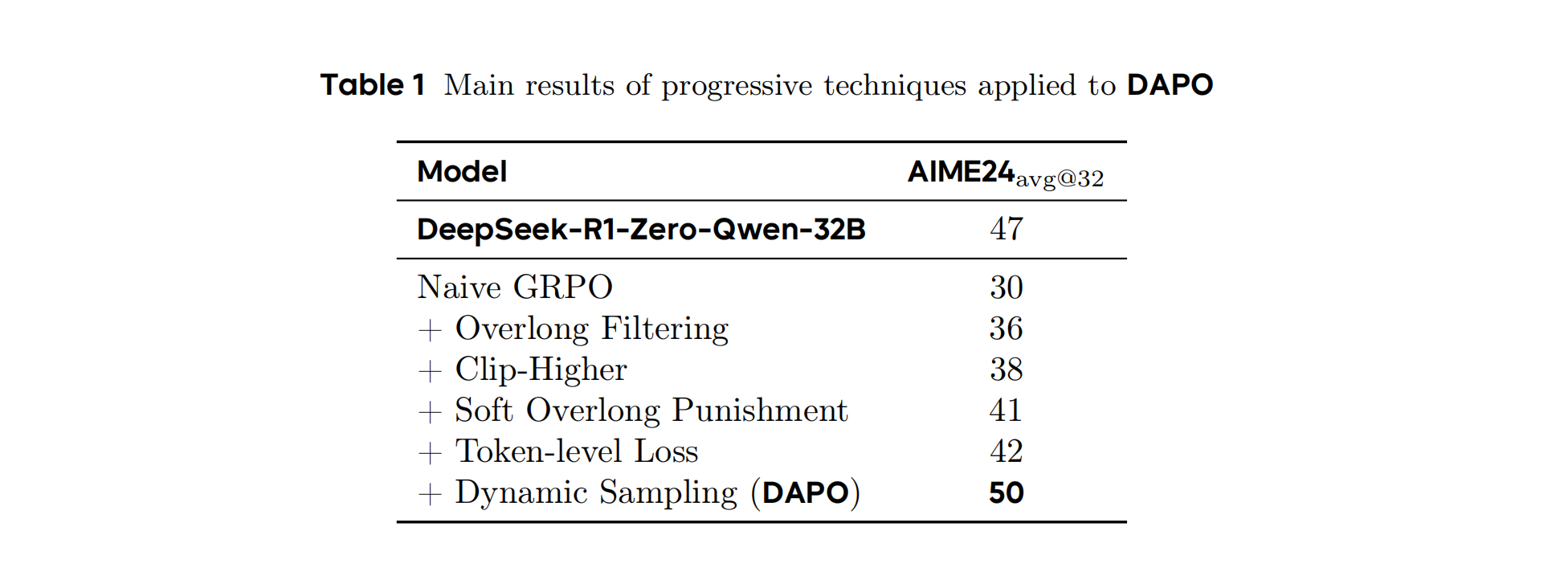
Table 1 展示了核心技术组件的消融实验结果,量化了各创新点对 AIME 2024 准确率的贡献。
4.2 训练动态分析
- 响应长度:稳定增长至约4000 tokens(Figure 7a),反映推理复杂度提升。
- 奖励分数:训练集奖励持续上升,但需警惕过拟合(Figure 7b)。
- 熵值与概率:通过Clip-Higher维持合理熵值(Figure 7c),避免概率分布坍塌(Figure 7d)。
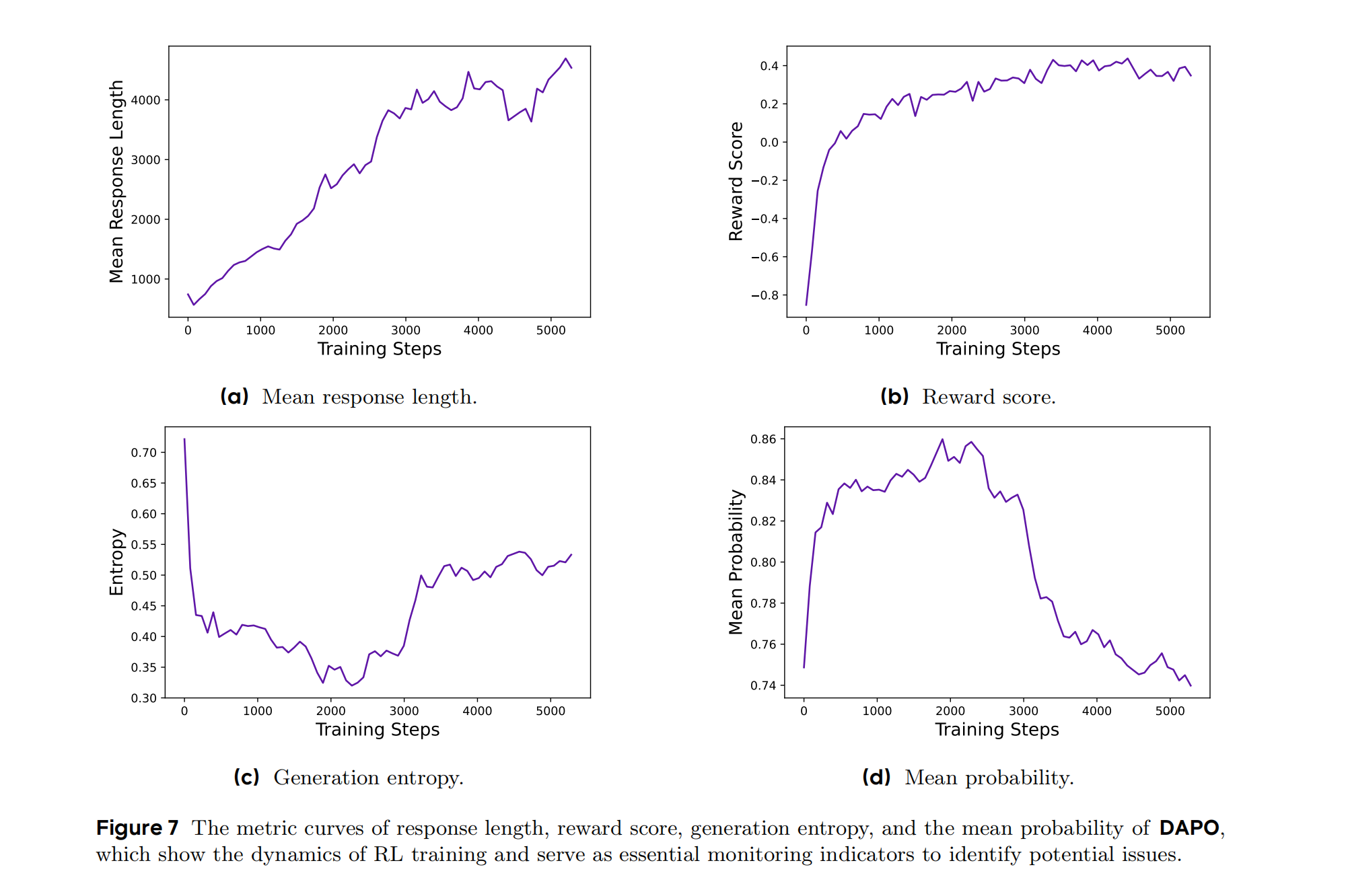
Figure 7 展示了 DAPO 训练过程中的四个关键指标随训练步数的变化趋势,横坐标为训练步数(0-5000步),纵坐标分别为:
- 子图(a):平均响应长度(Mean Response Length): 曲线从约2000 tokens 逐步增长至4000 tokens,最终稳定在约3500 tokens。 响应长度增长表明模型生成更复杂的推理步骤(如多步验证、反思行为),但未出现无意义的超长生成(如基线模型可能的熵坍塌导致的冗长输出)。
- 子图(b):奖励分数(Reward Score):曲线(奖励分数)在训练初期快速上升至0.2,随后略有波动但保持稳定。 奖励分数反映模型在训练集上的表现,稳定的高分表明模型有效拟合了训练数据,但需警惕过拟合(测试集准确率可能低于训练集)。
- 子图©:生成熵(Entropy):曲线(熵值)在训练初期从0.7下降到0.4,中期回升至0.5,最终稳定。 熵值代表输出多样性。DAPO通过Clip-Higher策略保持较高熵值,避免输出趋同,同时抑制低质量的过度探索(如基线模型可能的熵坍塌)。
- 子图(d):平均概率(Mean Probability): 曲线(平均概率)从0.74逐步上升至0.86,最终下降到0.74。 平均概率增长表明模型对正确输出的置信度提升,但未因过拟合导致概率分布过于陡峭(如基线模型可能的高概率坍塌)。
通俗理解:
- 子图(a):模型越来越擅长“写长作文”,但不会乱写。
- 子图(b):老师给的“训练分数”很高,但考试(测试集)成绩可能略低。
- 子图©:学生保持“脑洞大开”,但不过度放飞自我。
- 子图(d):学生对正确答案越来越自信,但不会“钻牛角尖”。
4.3 案例研究
在强化学习训练过程中,我们观察到一个有趣的现象:参与者模型的推理模式会随着时间的推移而动态演变。具体来说,该算法不仅强化了有助于正确解决问题的现有推理模式,而且还逐渐产生了最初不存在的全新推理模式。这一发现揭示了强化学习算法的适应性和探索能力,并为模型的学习机制提供了新的见解。例如,在模型训练的早期阶段,几乎没有发生检查和反思先前的推理步骤的情况。然而,随着训练的进行,模型表现出不同的反思和回溯行为,如 Table 2 所示。
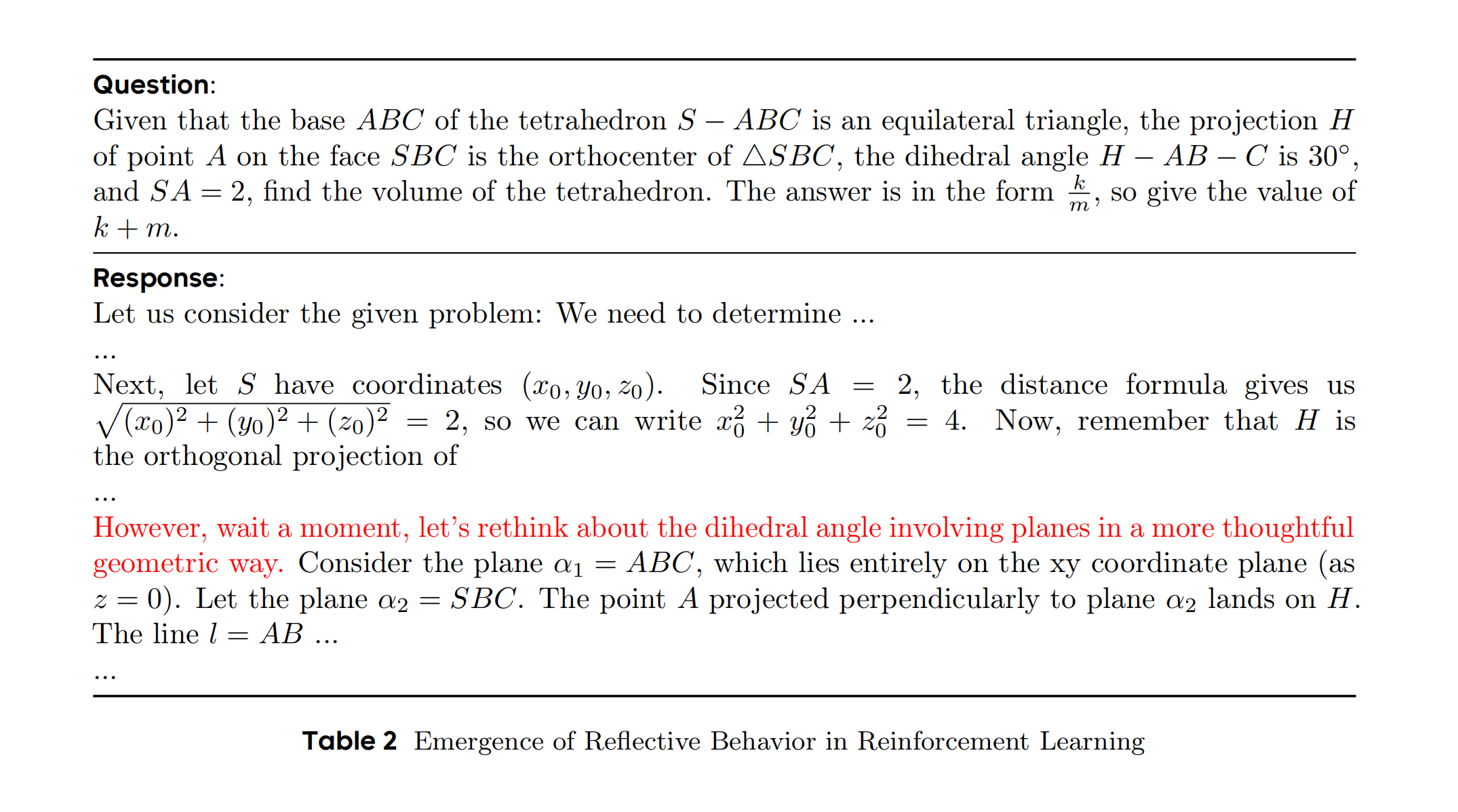
Table 2 展示了训练过程中模型推理行为的进化,特别是**反思行为(Reflective Behavior)**的涌现——模型从“直接推导”进化到“自我检查与修正”。
Question(几何推理题):
给定四面体 S − A B C S-ABC S−ABC 的底面 A B C ABC ABC 为等边三角形,点 A A A 在面 S B C SBC SBC 上的投影 H H H 是 △ S B C \triangle SBC △SBC 的垂心,二面角 H − A B − C H-AB-C H−AB−C 为 3 0 ∘ 30^\circ 30∘ ,且 S A = 2 SA = 2 SA=2 ,求四面体的体积(答案形式为分数 k m \frac{k}{m} mk ,需计算 k + m k+m k+m )。 问题核心需综合利用垂心、二面角、边长等几何条件,涉及空间坐标设定、向量正交关系和体积计算,属于复杂多步推理任务。
Response(模型响应对比):
| 训练阶段 | 模型响应片段 | 核心差异 |
|---|---|---|
| 早期 | “设点 S S S 的坐标为 ( x , y , z ) (x, y, z) (x,y,z) ,由 S A = 2 SA = 2 SA=2 得 x 2 + y 2 + z 2 = 4 x^2 + y^2 + z^2 = 4 x2+y2+z2=4 。 由于 H H H 是 △ S B C \triangle SBC △SBC 的垂心,故 S B = S C SB = SC SB=SC ,推测 △ S B C \triangle SBC △SBC 为等边三角形,进而计算高和体积为 3 3 \frac{\sqrt{3}}{3} 33 。” |
无反思行为: 1. 直接假设 △ S B C \triangle SBC △SBC 为等边三角形(未验证垂心性质); 2. 线性推导,未检查中间步骤的几何关系(如二面角条件未充分利用)。 |
| 后期 | “设 S S S 的坐标为 ( x , y , z ) (x, y, z) (x,y,z) ,由 S A = 2 SA = 2 SA=2 得 x 2 + y 2 + z 2 = 4 x^2 + y^2 + z^2 = 4 x2+y2+z2=4 。 但注意到 H H H 是垂心,需满足 S B ⊥ H C SB \perp HC SB⊥HC 且 S C ⊥ H B SC \perp HB SC⊥HB,这表明 S S S 的坐标需满足正交条件 ( x − x H ) ( x C − x H ) + ( y − y H ) ( y C − y H ) = 0 (x - x_H)(x_C - x_H) + (y - y_H)(y_C - y_H) = 0 (x−xH)(xC−xH)+(y−yH)(yC−yH)=0 (修正前期假设)。 结合二面角 3 0 ∘ 30^\circ 30∘ 重新计算高,最终体积为 1 2 \frac{1}{2} 21 ,故 k + m = 1 + 2 = 3 k+m = 1+2 = 3 k+m=1+2=3 。” |
反思行为涌现: 1. 主动识别前期假设错误(垂心不必然导致等边三角形); 2. 插入正交条件验证( S B ⊥ H C SB \perp HC SB⊥HC ),修正推理路径; 3. 充分利用所有几何条件(二面角、垂心性质),避免错误推导。 |
5. 结论与未来方向
5.1 贡献总结
DAPO通过四大创新技术(Clip-Higher、动态采样、Token级损失、超长奖励塑形),在AIME 2024基准上实现50分的开源最优成绩,训练效率提升50%。其开源系统为行业提供了可复现的大规模RL解决方案。
5.2 未来方向
- 数据增强:结合树搜索解码策略提升样本多样性。
- 算法鲁棒性:开发抗噪声奖励模型(如Weak-to-Strong方法)。
- 多模态扩展:探索DAPO在代码生成、定理证明等领域的应用。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 26
26 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)