强化学习 # Policy gradient
Policy Gradients:不通过分析奖励值, 直接输出行为的方法。对比起以值为基础的方法, Policy Gradients 直接输出动作的最大好处就是, 它能在一个连续区间内挑选动作, 而基于值的, 比如 Q-learning只能适用于action数量有限的情况。Policy Gradients可以结合神经网络。强化学习里面无标签,所以Policy Gradients没有误差,那要怎么进
前文:深度强化学习 # Deep-Q-Network利用神经网络对Q value function作近似表示。局限性在于其只适用于action有限的情况(神经网络输出层的节点数显然不能是无限的)。
在前文有提到过NN的两种结构,如果是输入State和action来得到Q呢?这里输出只有一个。是不是可以解决连续情况?答案是否定的。(因为我们还需要对所有的action求一个max(Q),虽然此时NN可以build,但是计算max(Q)时的循环次数无限次,导致max(Q)的计算不可行,且这种做法效率极度低下。
那么我们考虑第三种出路:神经网络输入状态直接输出动作,这就是策略梯度的思想了。
Policy Gradients:不通过分析奖励值, 直接输出行为的方法。对比起以值为基础的方法, Policy Gradients 直接输出动作的最大好处就是, 它能在一个连续区间内挑选动作, 而基于值的, 比如 Q-learning只能适用于action数量有限的情况。Policy Gradients可以结合神经网络。
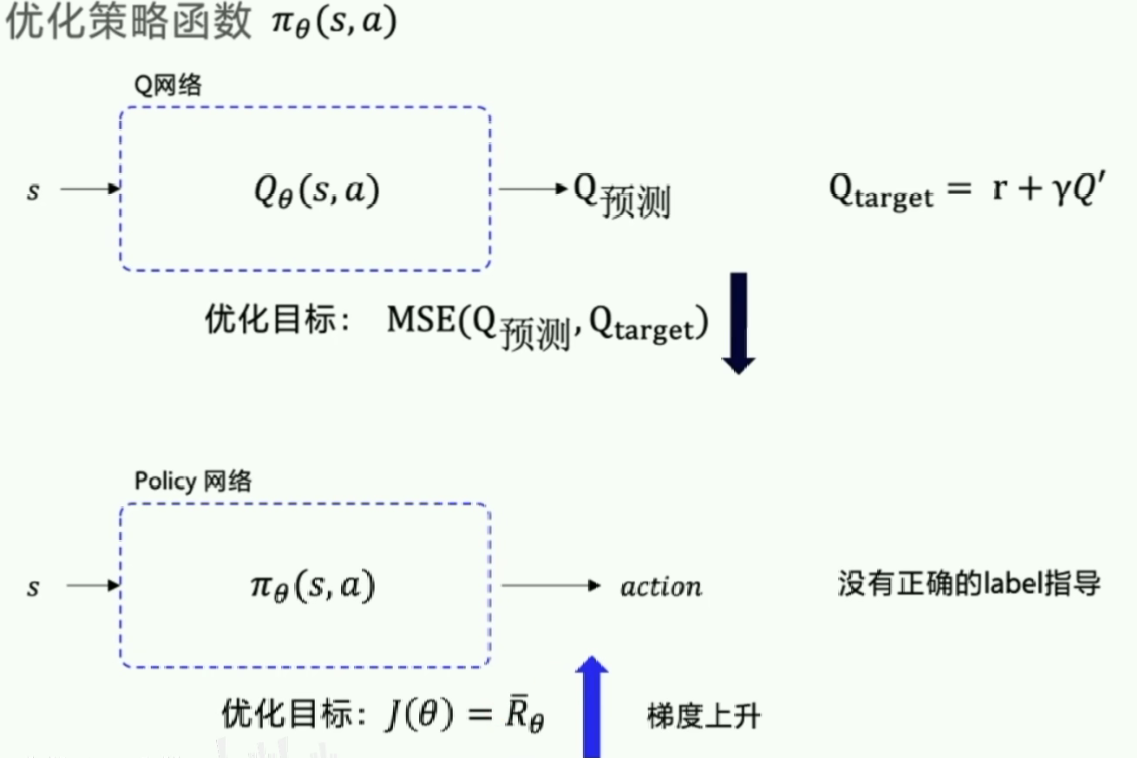
强化学习里面无标签,DQN因为是基于时序差分学习有Q现实和Q估计的差距所以可以作为loss function,但是PG没有Q,所以Policy Gradients没有误差,那要怎么进行神经网络的误差反向传递呢?(因此还是需要充分利用reward的信息)
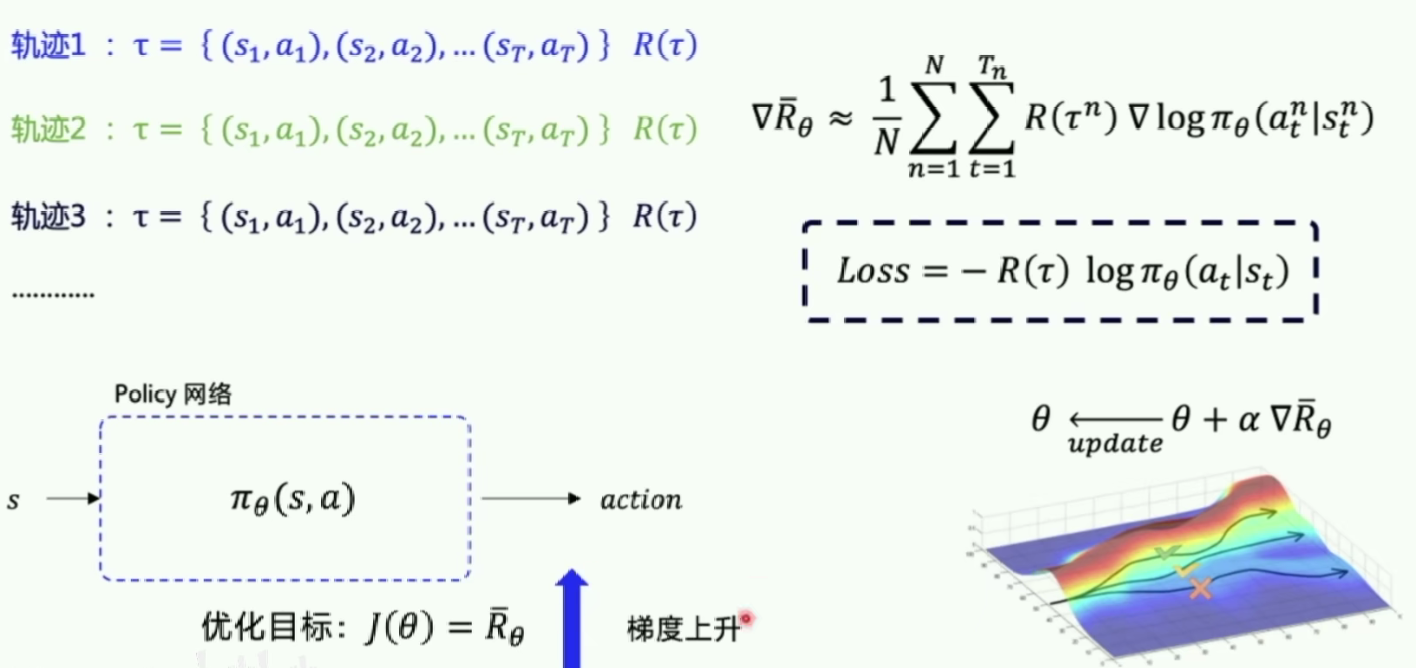
Policy Gradients的核心思想: 观测的信息通过神经网络分析, 选出了左边的行为, 我们直接进行反向传递, 使之下次被选的可能性增加, 但是奖惩信息却告诉我们, 这次的行为是不好的, 那我们的动作可能性增加的幅度随之被减低. 假如这次的观测信息让神经网络选择了右边的行为, 右边的行为随之想要进行反向传递, 使右边的行为下次被多选一点, 这时, 奖惩信息也来了, 告诉我们这是好行为, 那我们就在这次反向传递的时候加大力度(好,请加大力度!~)。这样就能靠奖励来左右我们的神经网络反向传递。即loss function是 − R θ ˉ -\bar{R_{\theta}} −Rθˉ
补充解释一下:为什么policy gradient可以在连续区间选择动作?这里看来动作不是还是离散的吗?而且还是概率选择离散动作。
我们考虑一下:一个连续区间的数值,是否可以通过区间端点和一个比例得到?(定比分点)
所以在输出的概率值(连续值)的基础上乘以一个系数就可以实现获得连续值的输出。
Policy Gradients要输出的不是action对应的value而是action,这样就跳过了 value 这个阶段。最大的一个优势是: 输出的这个 action 可以是一个连续的值, 之前我们说到的 value-based 方法输出的都是不连续的值。
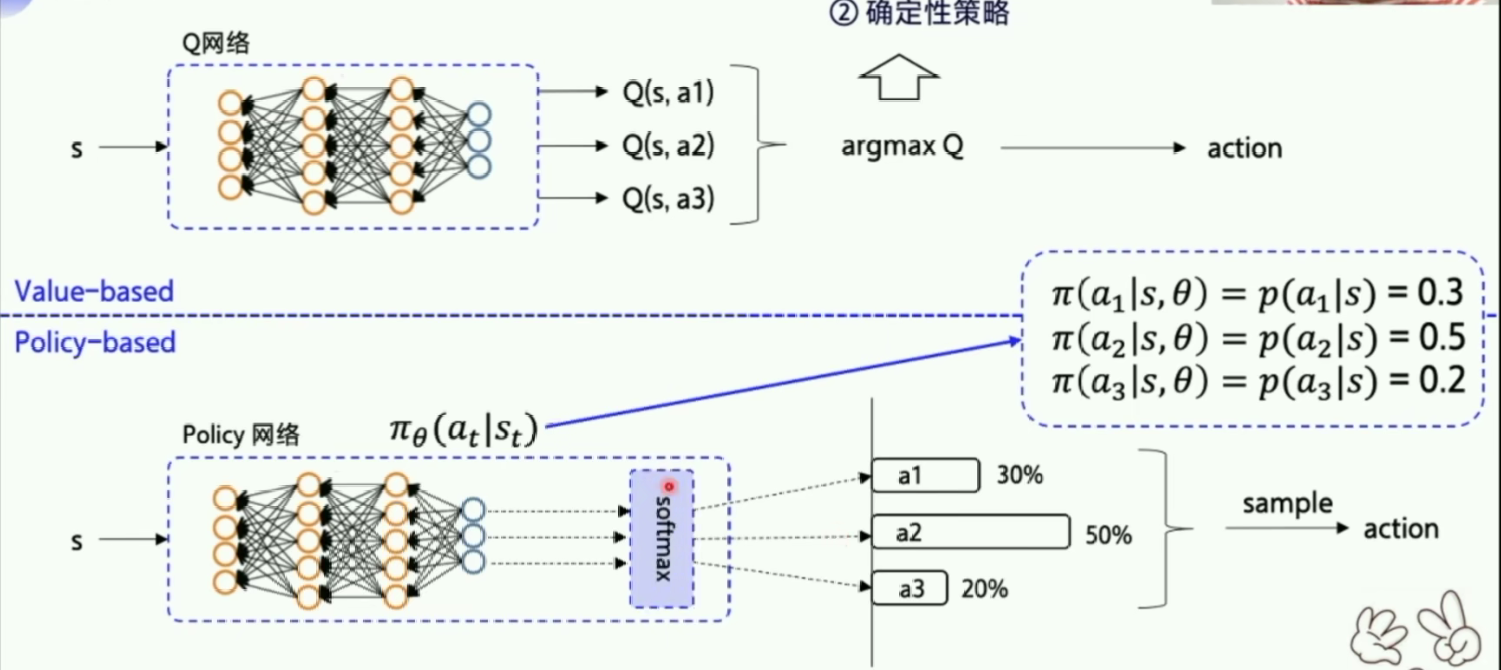
输出概率通过softmax归一化。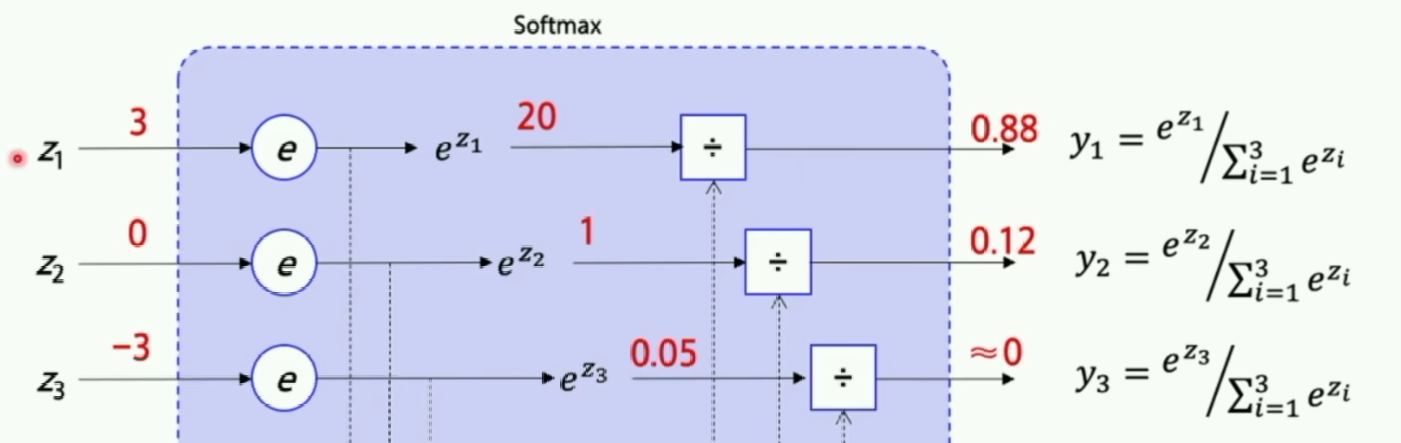
在PG中很多问题是分幕式(Episode)的。优化目标是让每个episode的总reward都尽可能大。
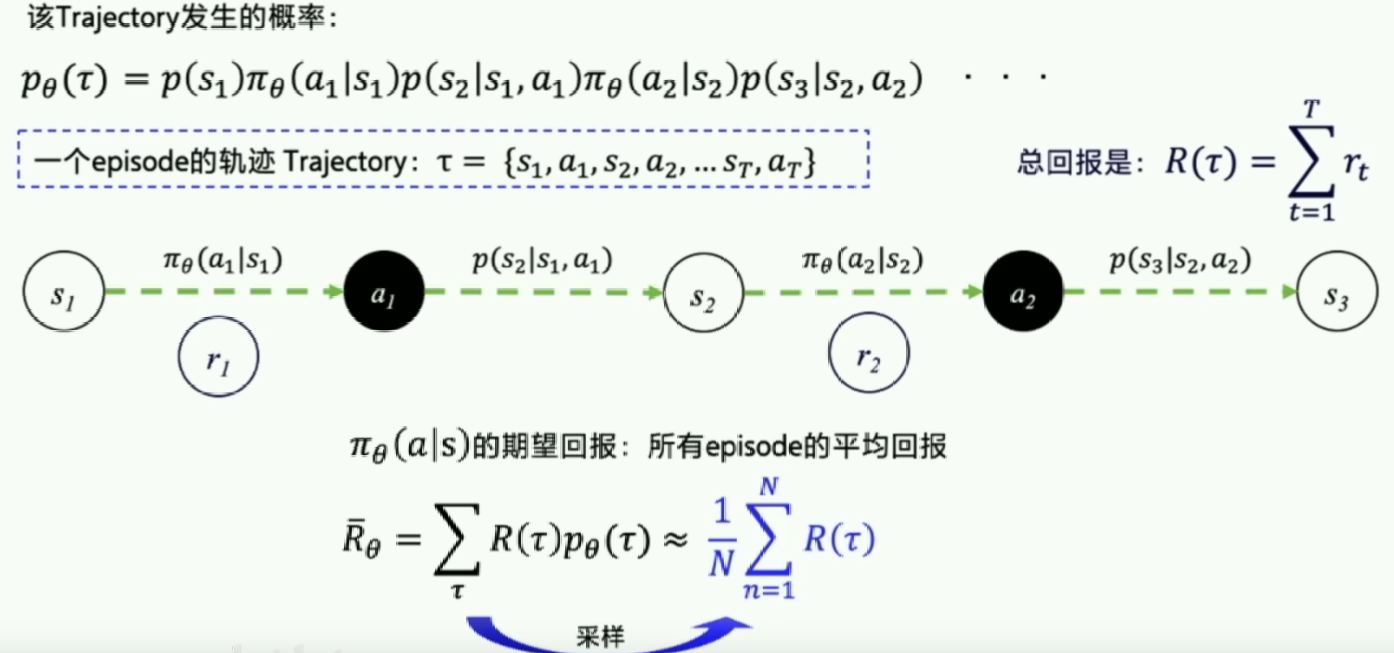 当N足够大时可以近似期望回报(采样)。
当N足够大时可以近似期望回报(采样)。
求解 ∇ R θ ˉ \nabla{\bar{R_\theta}} ∇Rθˉ的具体细节(可以跳过):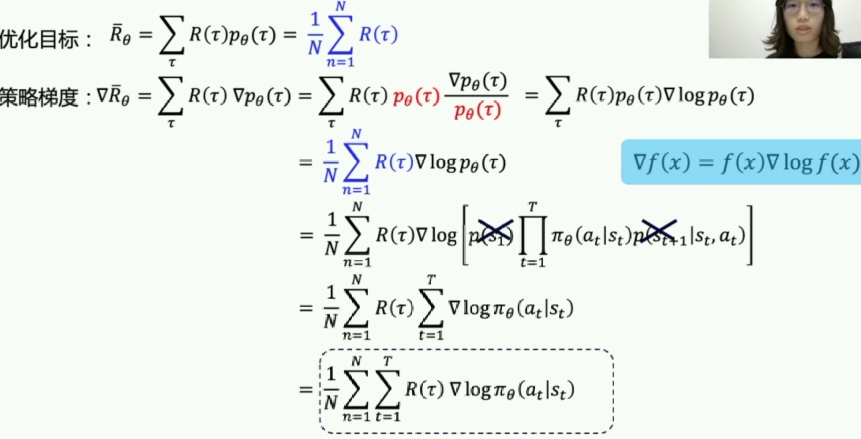
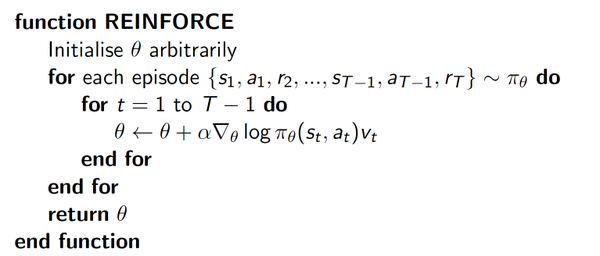
- 蒙特卡洛与时序差分
(这里的MC蒙特卡洛方法实际上就是下面的REINFORCE方法,时序差分TD算法是后面要将到的Actor-Critic算法)
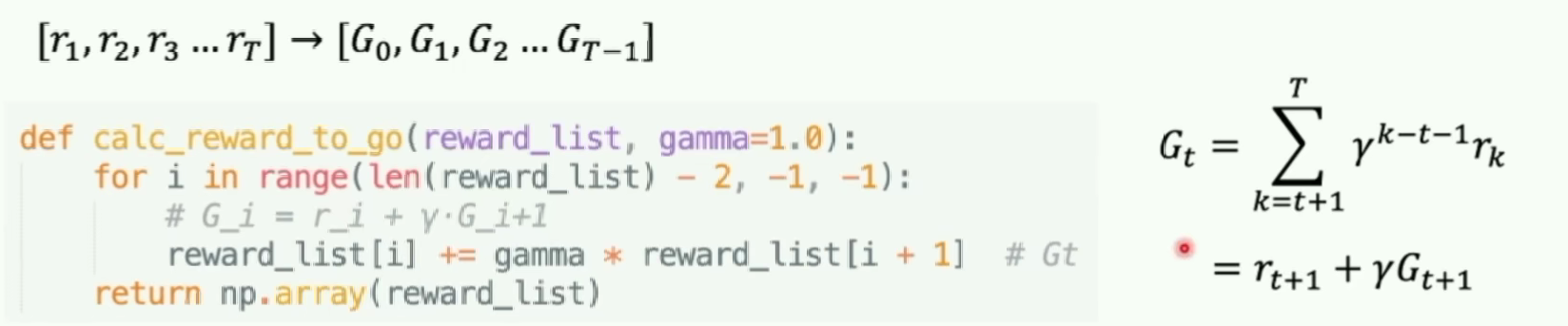
Gt是后面的reward之和。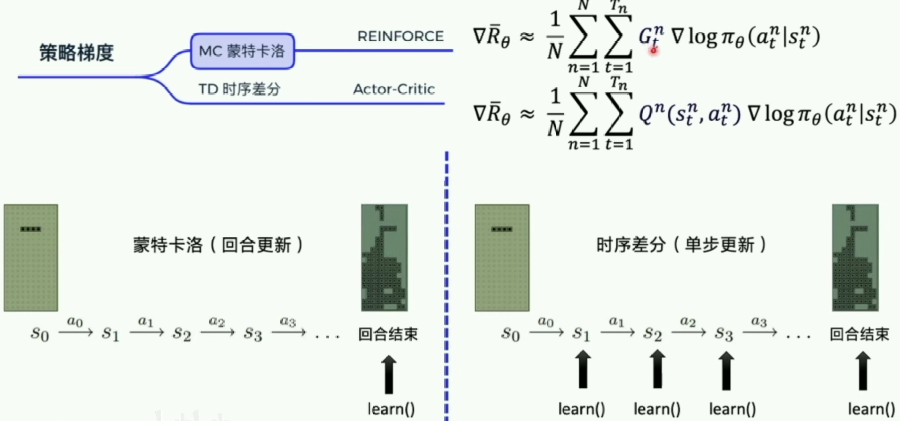
REINFORCE算法因为是一个episode更新,所以在特定的step可以计算后面的reward之和即 G t G_t Gt。而AC方法是用Q近似 G t G_t Gt,所以可以做到单步更新。
计算Gt:
REINFORCE算法:基于 整条回合数据 的更新
Policy gradient的第一个算法是一种基于 整条回合数据 的更新, 也叫 REINFORCE 方法。因为也是NN所以需要梯度下降。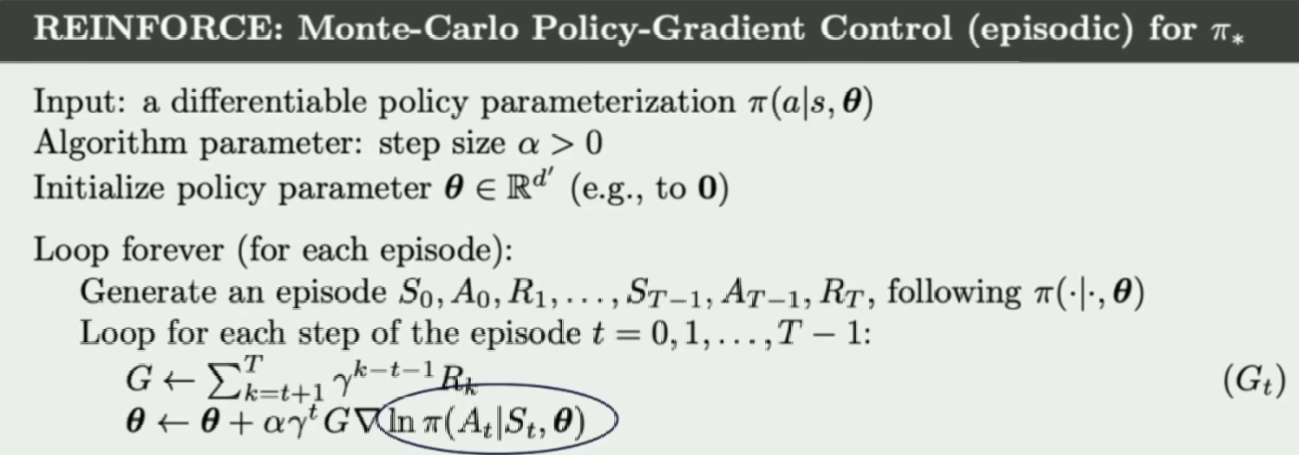
重点:梯度下降里面,希望动作在下一次有机会更多出现, v t v_t vt告诉我们这个更新方向是否正确,如果正确就更新幅度更大,否则更小。log形式的概率会有更好的收敛性。
∇ θ ( log ( p o l i c y ( s t , a t ) ) ∗ V ) \nabla_{\theta}(\log(policy(s_t,a_t))*V) ∇θ(log(policy(st,at))∗V)表示状态S对选择的动作a的吃惊度
代码:github
因为是基于回合的,所以会在回合中的每一次reward进行处理,让reward能更有导向性的引导policy gradient的方向。
for i_episode in range(3000):
observation = env.reset()
while True:
if RENDER: env.render()
action = RL.choose_action(observation)
observation_, reward, done, info = env.step(action)
RL.store_transition(observation, action, reward) # 存储这一回合的 transition
if done:
ep_rs_sum = sum(RL.ep_rs)
if 'running_reward' not in globals():
running_reward = ep_rs_sum
else:
running_reward = running_reward * 0.99 + ep_rs_sum * 0.01
if running_reward > DISPLAY_REWARD_THRESHOLD: RENDER = True # 判断是否显示模拟
print("episode:", i_episode, " reward:", int(running_reward))
vt = RL.learn() # 学习, 输出 vt, 我们下节课讲这个 vt 的作用
if i_episode == 0:
plt.plot(vt) # plot 这个回合的 vt
plt.xlabel('episode steps')
plt.ylabel('normalized state-action value')
plt.show()
break
observation = observation_
class PolicyGradient:
# 初始化 (有改变)
def __init__(self, n_actions, n_features, learning_rate=0.01, reward_decay=0.95, output_graph=False):
# 建立 policy gradient 神经网络 (有改变)
def _build_net(self):
# 选行为 (有改变)
def choose_action(self, observation):
# 存储回合 transition (有改变)
def store_transition(self, s, a, r):
# 学习更新参数 (有改变)
def learn(self, s, a, r, s_):
# 衰减回合的 reward (新内容)
def _discount_and_norm_rewards(self):
class PolicyGradient:
def __init__(self, n_actions, n_features, learning_rate=0.01, reward_decay=0.95, output_graph=False):
self.n_actions = n_actions
self.n_features = n_features
self.lr = learning_rate # 学习率
self.gamma = reward_decay # reward 递减率
self.ep_obs, self.ep_as, self.ep_rs = [], [], [] # 这是我们存储 回合信息的 list
self._build_net() # 建立 policy 神经网络
self.sess = tf.Session()
if output_graph: # 是否输出 tensorboard 文件
# $ tensorboard --logdir=logs
# http://0.0.0.0:6006/
# tf.train.SummaryWriter soon be deprecated, use following
tf.summary.FileWriter("logs/", self.sess.graph)
self.sess.run(tf.global_variables_initializer())
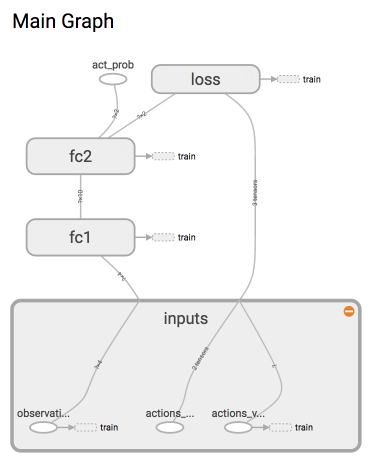
def _build_net(self):
with tf.name_scope('inputs'):
self.tf_obs = tf.placeholder(tf.float32, [None, self.n_features], name="observations") # 接收 observation
self.tf_acts = tf.placeholder(tf.int32, [None, ], name="actions_num") # 接收我们在这个回合中选过的 actions
self.tf_vt = tf.placeholder(tf.float32, [None, ], name="actions_value") # 接收每个 state-action 所对应的 value (通过 reward 计算)
# fc1
layer = tf.layers.dense(
inputs=self.tf_obs,
units=10, # 输出个数
activation=tf.nn.tanh, # 激励函数
kernel_initializer=tf.random_normal_initializer(mean=0, stddev=0.3),
bias_initializer=tf.constant_initializer(0.1),
name='fc1'
)
# fc2
all_act = tf.layers.dense(
inputs=layer,
units=self.n_actions, # 输出个数
activation=None, # 之后再加 Softmax
kernel_initializer=tf.random_normal_initializer(mean=0, stddev=0.3),
bias_initializer=tf.constant_initializer(0.1),
name='fc2'
)
self.all_act_prob = tf.nn.softmax(all_act, name='act_prob') # 激励函数 softmax 出概率
with tf.name_scope('loss'):
# 最大化 总体 reward (log_p * R) 就是在最小化 -(log_p * R), 而 tf 的功能里只有最小化 loss
neg_log_prob = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=all_act, labels=self.tf_acts) # 所选 action 的概率 -log 值
# 下面的方式是一样的:
# neg_log_prob = tf.reduce_sum(-tf.log(self.all_act_prob)*tf.one_hot(self.tf_acts, self.n_actions), axis=1)
loss = tf.reduce_mean(neg_log_prob * self.tf_vt) # (vt = 本reward + 衰减的未来reward) 引导参数的梯度下降
with tf.name_scope('train'):
self.train_op = tf.train.AdamOptimizer(self.lr).minimize(loss)
上面提到了两种形式来计算 neg_log_prob, 这两种形式是一模一样的, 只是第二个是第一个的展开形式. 如果你仔细看第一个形式, 这不就是在神经网络分类问题中的 cross-entropy 吗。
交叉熵计算两个概率分布之间的距离。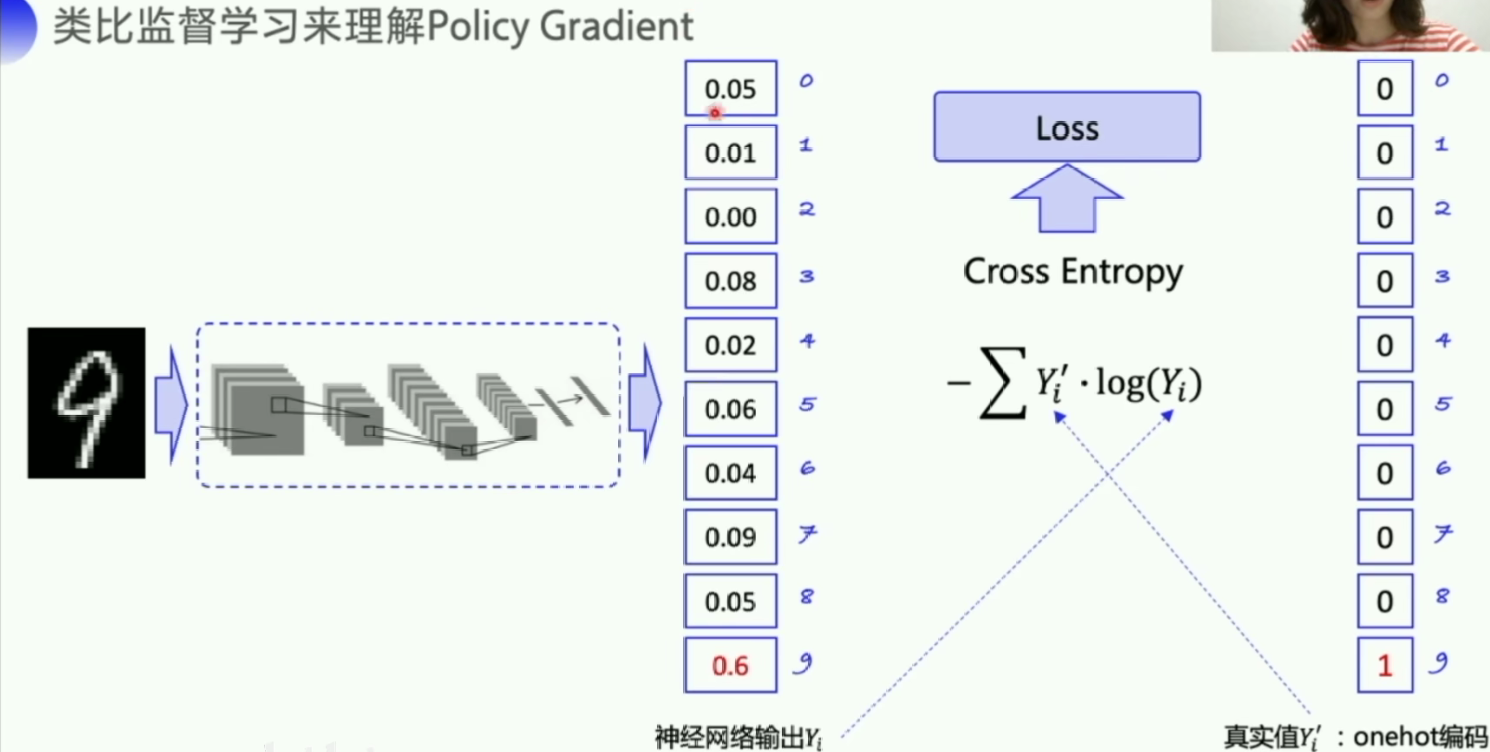
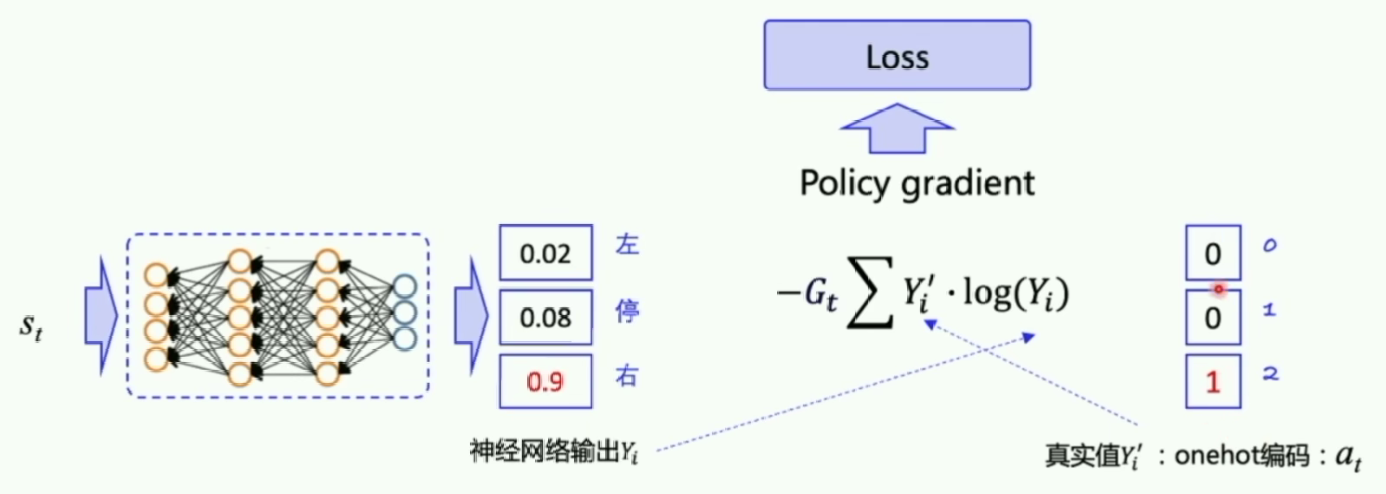
在policy gradient中,真实的action不一定是正确的action,所以还要用上面讲过的reward反馈,因此在外部乘了一个Gt。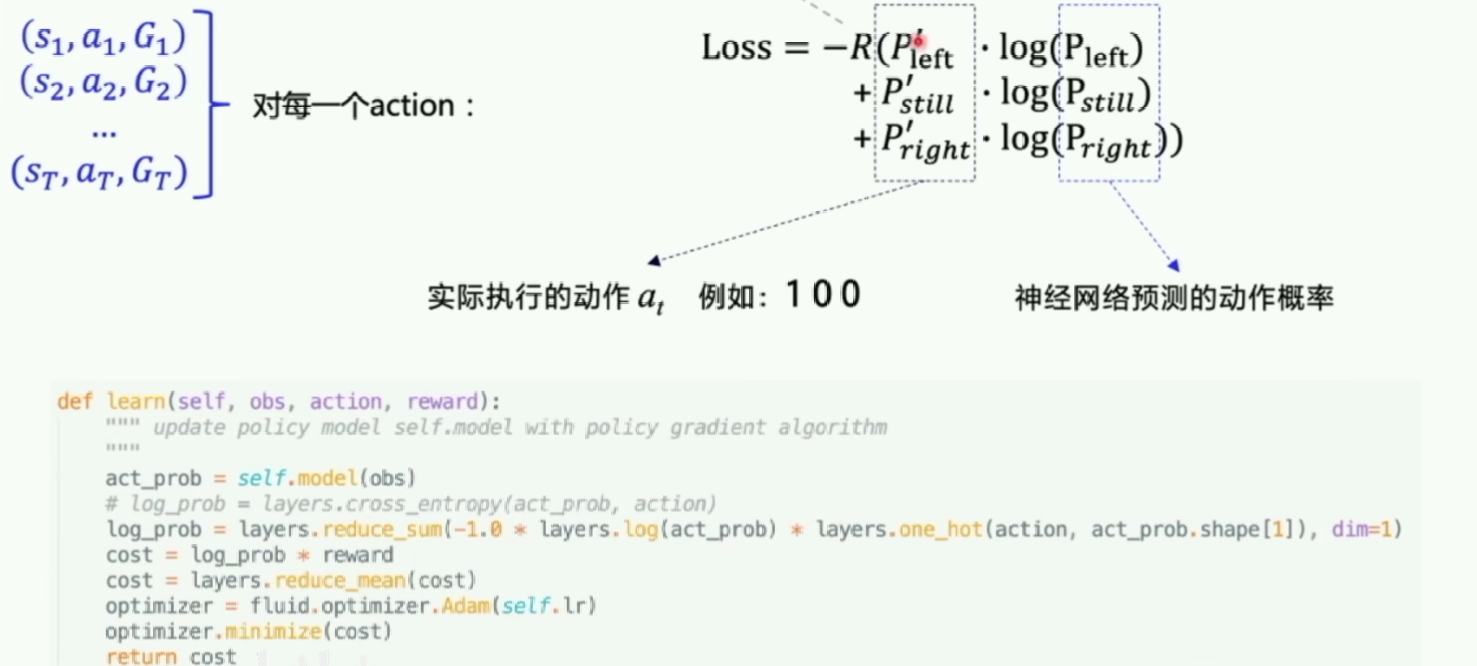
(注:R=Gt)
我们的 loss 在原本的 cross-entropy 形式上乘以 vt, 用 vt 来告诉这个 cross-entropy 算出来的梯度是不是一个值得信任的梯度。如果 vt 小, 或者是负的, 就说明这个梯度下降是一个错误的方向, 我们应该向着另一个方向更新参数, 如果这个 vt 是正的, 或很大, vt 就会称赞 cross-entropy 出来的梯度, 并朝着这个方向梯度下降。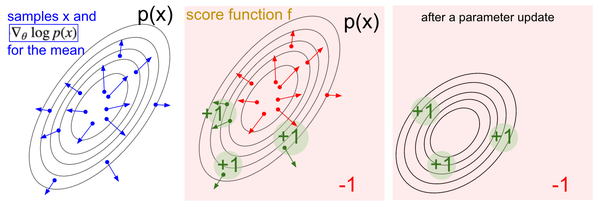
Q:为什么是 loss=-log(prob)vt 而不是 loss=-probvt ?
A:这里的 prob 是从 softmax 出来的, 而计算神经网络里的所有参数梯度, 使用到的就是 cross-entropy, 然后将这个梯度乘以 vt 来控制梯度下降的方向和力度.。
class PolicyGradient:
def __init__(self, n_actions, n_features, learning_rate=0.01, reward_decay=0.95, output_graph=False):
...
def _build_net(self):
...
def choose_action(self, observation):
prob_weights = self.sess.run(self.all_act_prob, feed_dict={self.tf_obs: observation[np.newaxis, :]}) # 所有 action 的概率
action = np.random.choice(range(prob_weights.shape[1]), p=prob_weights.ravel()) # 根据概率来选 action
return action
def store_transition(self, s, a, r):
self.ep_obs.append(s)
self.ep_as.append(a)
self.ep_rs.append(r)
def learn(self):
# 衰减, 并标准化这回合的 reward
discounted_ep_rs_norm = self._discount_and_norm_rewards() # 功能再面
# train on episode
self.sess.run(self.train_op, feed_dict={
self.tf_obs: np.vstack(self.ep_obs), # shape=[None, n_obs]
self.tf_acts: np.array(self.ep_as), # shape=[None, ]
self.tf_vt: discounted_ep_rs_norm, # shape=[None, ]
})
self.ep_obs, self.ep_as, self.ep_rs = [], [], [] # 清空回合 data
return discounted_ep_rs_norm # 返回这一回合的 state-action value
def _discount_and_norm_rewards(self):
# discount episode rewards
discounted_ep_rs = np.zeros_like(self.ep_rs)
running_add = 0
for t in reversed(range(0, len(self.ep_rs))):
running_add = running_add * self.gamma + self.ep_rs[t]
discounted_ep_rs[t] = running_add
# normalize episode rewards
discounted_ep_rs -= np.mean(discounted_ep_rs)
discounted_ep_rs /= np.std(discounted_ep_rs)
return discounted_ep_rs
Reference
- https://mofanpy.com/tutorials/machine-learning/reinforcement-learning/intro-PG/
- 《Policy Gradient Methods for Reinforcement Learning with Function Approximation》NIPS-1999
- paddlepaddle-强化学习
- 强化学习 10 —— Policy Gradient详细推导
- 强化学习 11 —— REINFORCE 算法推导与 tensorflow2.0 代码实现

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 2
2 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)