强化学习_02_贝尔曼方程简单实现
参考: 《用Python动手学强化》一、贝尔曼方程1.1 价值计算在t时刻选择行动的价值Gt=∑k=0T−t−1γkrt+1+kG_t=\sum_{k=0}^{T-t-1}\gamma^kr_{t+1+k}Gt=∑k=0T−t−1γkrt+1+k, 即未来每个时刻的及时奖励乘以折扣率(γ\gammaγ)的累积和。【注:】γ\gammaγ:折扣率rrr: 及时奖励t+1+k: 下标表示未来某一
参考: 《用Python动手学强化》
一、贝尔曼方程
1.1 价值计算
在t时刻选择行动的价值Gt=∑k=0T−t−1γkrt+1+kG_t=\sum_{k=0}^{T-t-1}\gamma^kr_{t+1+k}Gt=∑k=0T−t−1γkrt+1+k, 即未来每个时刻的及时奖励乘以折扣率(γ\gammaγ)的累积和。
【注:】
- γ\gammaγ:折扣率
- rrr: 及时奖励
- t+1+k: 下标表示未来某一时刻
- k: k >= 0 ; k <= T-t-1;
- T:为最终获得奖励的时间
我们可以将这个方程改成递归的形式:
Gt=rt+1+γGt+1G_t=r_{t+1} + \gamma G_{t+1}Gt=rt+1+γGt+1
即我们可以从未来往回逐步估算出GtG_tGt的值。
1.2 增加策略的价值计算
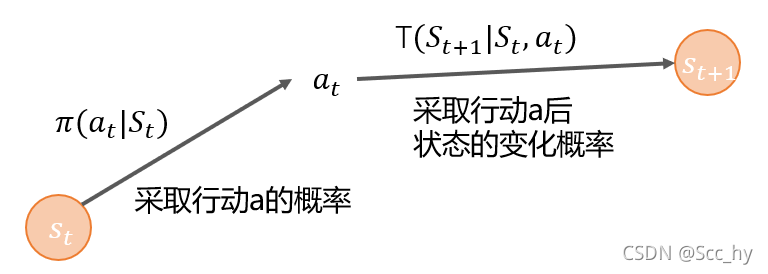
我们已经知道了一个时刻状态下的期望价值计算方法。那么在加上该状态下的不同行动的行动概率π(a∣s)\pi(a|s)π(a∣s),以及采取行动后对应的环境中的状态变化的概率T(s′∣s,a)T(s'|s, a)T(s′∣s,a)
【注:】
- π(a∣s)\pi(a|s)π(a∣s): 状态s下采取行动a的概率
- T(s′∣s,a)T(s'|s, a)T(s′∣s,a): 状态s下采取行动a后下一时刻的状态
- s’: 为下一时刻的状态
这样我们就可以得到当前状态的价值了(以相乘的方式计算期望):
Vπ(s)=∑aπ(a∣s)∑s′T(s′∣s,a)[rt+1+γGt+1]V_\pi(s) = \sum_a\pi(a|s)\sum_{s'}T(s'|s, a)[r_{t+1} + \gamma G_{t+1}]Vπ(s)=a∑π(a∣s)s′∑T(s′∣s,a)[rt+1+γGt+1]
将G统一改为V,t+1用'简化,然后当前的奖励用奖励函数RRR替换,得到最终公式(Bellman Equation):
Vπ(s)=∑aπ(a∣s)∑s′T(s′∣s,a)[R(s,s′)+γV(s′)]V_\pi(s) = \sum_a\pi(a|s)\sum_{s'}T(s'|s, a)[R(s, s') + \gamma V(s')]Vπ(s)=a∑π(a∣s)s′∑T(s′∣s,a)[R(s,s′)+γV(s′)]
当基于价值最大化选择行动的情况下,我们可以对方程修改为下式:
V(s)=maxa∑s′T(s′∣s,a)[R(s,s′)+γV(s′)]V(s) = max_a \sum_{s'}T(s'|s, a)[R(s, s') + \gamma V(s')]V(s)=maxas′∑T(s′∣s,a)[R(s,s′)+γV(s′)]
如果奖励函数只与当前状态相关,那么可以进一步简化。(下面的脚本主要也是基于这个公式来写的)
V(s)=R(s)+γmaxa∑s′T(s′∣s,a)V(s′) ......... 公式(1)V(s) = R(s) + \gamma max_a \sum_{s'}T(s'|s, a)V(s') \ \ \ \ ......... \ \ \ 公式(1)V(s)=R(s)+γmaxas′∑T(s′∣s,a)V(s′) ......... 公式(1)
二、基于价值的贝尔曼方程实现
主要方程
V(s)=R(s)+γmaxa∑s′T(s′∣s,a)V(s′) ......... 公式(1)V(s) = R(s) + \gamma max_a \sum_{s'}T(s'|s, a)V(s') \ \ \ \ ......... \ \ \ 公式(1)V(s)=R(s)+γmaxas′∑T(s′∣s,a)V(s′) ......... 公式(1)
计算不同状态链路的递归的时候会对一些状态进行重复计算,所以我们用lru_cache做简单优化。
from functools import lru_cache
@lru_cache(maxsize=128)
def V(s, gamma=0.99): # 递归
# 等价于 公式(1)
return R(s) + gamma * max_V_on_next_state(s)
奖励函数
def R(s):
if s == 'happy_end':
return 1
elif s == 'bad_end':
return -1
else:
return 0
行动概率与状态转移函数
为了简单示意,我们仅仅定义
- 两个行动
- UP, DOWN
- 状态转移概率
- 和行动一致的转移概率90%,和相反行动的转移概率为10%
最终结束条件
- 最多行动5次
- 当行动少于5次 则返回
{下一状态(s, UP):概率, 下一状态(s, DOWN):概率}
- 当行动少于5次 则返回
- up >= 4次为happy_end, 否则为bad_end
def max_V_on_next_state(s):
# 如果游戏结束,则期望为0
if s in ['happy_end', 'bad_end']:
return 0
actions = ['up', 'down']
values = []
for a in actions:
trainsition_probs = transit_func(s, a)
v = 0
for next_state, prob in trainsition_probs.items():
v += prob * V(next_state) # 递归
values.append(v)
# 拿取行动中最大效益的值
return max(values)
def transit_func(s, a):
"""
param s: 状态: 定义成 初始_行动_行动... 如: state_up_down_up | state | state_up 等
param a: 行动: {'up', 'down'}
"""
actions = s.split('_')[1:]
LIMIT_GAME_COUNT = 5
HAPPY_END_BORDER = 4
MOVE_PROB = 0.9
def next_state(state, action):
return "_".join([state, action])
# 结束条件
if len(actions) == LIMIT_GAME_COUNT:
up_count = sum([1 if a == 'up' else 0 for a in actions])
state = 'happy_end' if up_count >= HAPPY_END_BORDER else 'bad_end'
prob = 1.0
return {state: prob}
else:
# 状态转移函数
opposite = 'up' if a == 'down' else 'down'
return {
next_state(s, a): MOVE_PROB,
next_state(s, opposite): 1- MOVE_PROB
}
简单示例
从所有可能的未来逐步计算到当前。
if __name__ == "__main__":
# 固定上下走动, 状态叠加在后面
# state_up_up_up_up_up_up -> 1 + 0 = 1
# state_up_up_up_up_up -> 0 + 0.99 * (0.9*1 + 0.1*1) = 0.99
# state_up_up_up_up -> 0 + 0.99 * (0.9*0.99 + 0.1*0.99) = 0.9801
print(V('state_up_up_up_up'))
print(V('state_up_down_up_up'))
print(V('state_down_up_up_up'))
"""
0.9801
0.78408
0.78408
"""

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 1
1 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)