图像分割技术全景:语义分割、实例分割与全景分割详解
全景分割是Kirillov等人于2018年提出的新任务,旨在统一语义分割和实例分割。其目标是为图像中的每个像素分配一个唯一的标签:如果是"可数物体"(thing),则标签包含实例ID;如果是"不可数区域"(stuff),则只包含类别标签。全景分割的特点包括:每个像素有且只有一个标签没有重叠区域或未定义区域同时处理thing和stuff类别从语义分割到实例分割再到全景分割,图像分割技术不断向着更精细
引言:图像分割的重要性
在计算机视觉领域,图像分割是一项基础而关键的任务,它旨在将数字图像划分为多个有意义的区域或对象。随着深度学习技术的发展,图像分割已经取得了革命性进展,并在自动驾驶、医学影像分析、遥感图像处理、工业检测等领域展现出巨大价值。
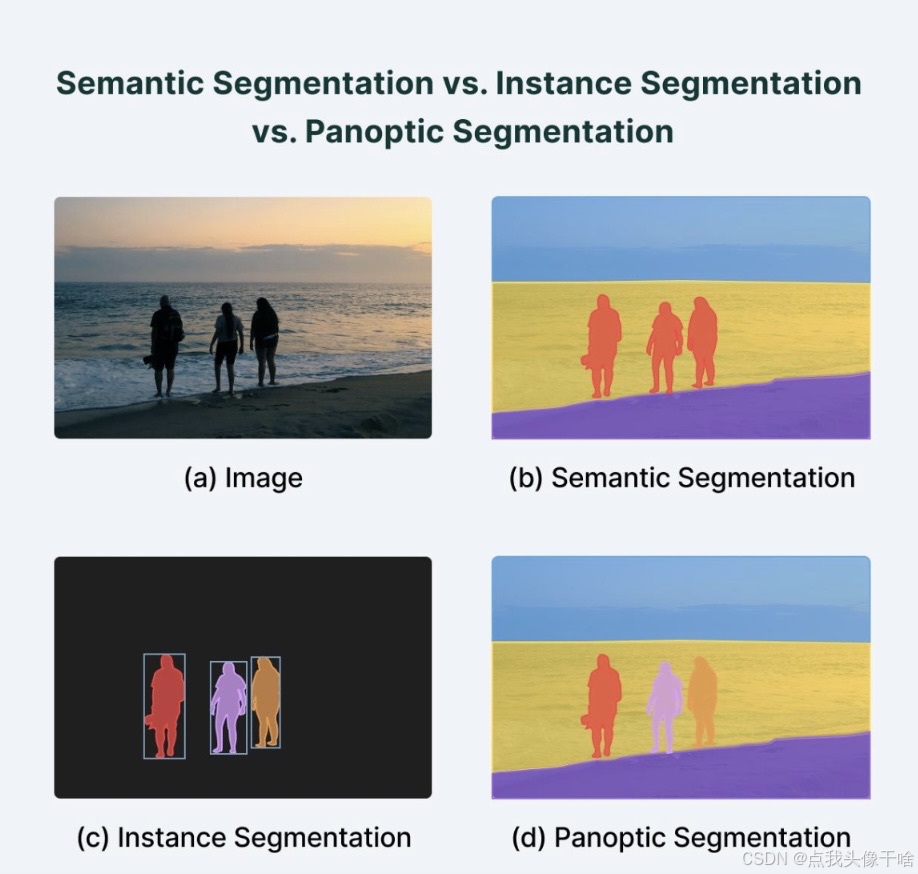
图像分割可以细分为三种主要类型:语义分割(Semantic Segmentation)、实例分割(Instance Segmentation)和全景分割(Panoptic Segmentation)。这三种技术各有特点和应用场景,共同构成了现代图像分割技术的完整体系。本文将深入探讨这三种分割技术的原理、方法、应用及最新进展。
一、语义分割:像素级别的分类
1.1 语义分割基本概念
语义分割是最基础的图像分割任务,其目标是为图像中的每个像素分配一个类别标签,而不区分同一类别中的不同实例。例如,在一张街景图片中,所有"汽车"类别的像素都会被标记为相同的类别,而不关心这是多辆不同的汽车。
语义分割的核心特点是:
像素级别的密集预测
只关注"是什么"而不关心"有几个"
输出是每个像素的类别标签
1.2 经典语义分割网络架构
全卷积网络(FCN)是语义分割领域的里程碑式工作,它首次证明了卷积神经网络可以端到端地解决分割问题。FCN的关键创新包括:
1. 用卷积层替换全连接层,使网络可以接受任意尺寸的输入
2. 使用转置卷积(反卷积)进行上采样,恢复空间分辨率
3. 引入跳跃连接(skip connection)融合不同层次的特征
随后,U-Net在医学图像分割领域大放异彩,其对称的编码器-解码器结构和跨层连接成为许多后续工作的基础。DeepLab系列则通过空洞卷积(Atrous Convolution)和ASPP(Atrous Spatial Pyramid Pooling)模块扩大了感受野而不损失分辨率。
1.3 语义分割的挑战与解决方案
语义分割面临的主要挑战包括:
1. 类别不平衡问题:某些类别(如背景)可能占据图像的绝大部分区域。解决方案包括加权损失函数、在线难例挖掘等。
2. 细节信息丢失:多次下采样导致小物体和边界信息丢失。金字塔池化模块(PPM)和特征金字塔网络(FPN)被提出以解决这一问题。
3. 实时性要求:许多应用需要实时分割。轻量级网络如ENet、ICNet等通过设计高效的网络结构来满足实时需求。
1.4 语义分割的应用场景
语义分割广泛应用于:
自动驾驶中的道路场景理解
医学图像中的器官或病变区域分割
遥感图像中的土地利用分类
视频监控中的人物/物体分割
二、实例分割:区分同类别的不同个体
2.1 实例分割基本概念
实例分割在语义分割的基础上更进一步,不仅需要识别每个像素的类别,还要区分同一类别中的不同实例。例如,在一群人中,实例分割需要明确标出每个人的轮廓并区分这是不同的人。
实例分割结合了目标检测(定位和区分个体)和语义分割(像素级分类)的特点,是更为复杂的任务。
2.2 主流实例分割方法
实例分割方法大致可分为两类:
基于检测的方法:
Mask R-CNN:Faster R-CNN的扩展,添加了一个并行的掩码预测分支
Cascade Mask R-CNN:通过级联结构逐步优化检测和分割结果
TensorMask:类似于滑动窗口的密集预测方法
基于分割的方法:
Deep Watershed Transform:将分割问题转化为能量最小化问题
PolarMask:将实例表示为中心到边界的极坐标距离
SOLO/SOLOv2:将实例分割视为分类问题,直接预测实例掩码
2.3 实例分割的关键技术
1. RoIAlign:Mask R-CNN中提出的区域特征对齐方法,解决了RoIPooling的量化误差问题
2. 掩码表示:如何高效表示和预测掩码是关键。二值掩码、轮廓参数化(如多边形、样条曲线)和距离变换等都是常用方法
3. 后处理:许多方法需要后处理步骤(如NMS)来合并重叠预测,这往往成为计算瓶颈
2.4 实例分割的应用价值
实例分割在以下场景中不可或缺:
人群分析:统计人数、追踪个体
生物医学:细胞实例分割与分析
零售:货架商品识别与计数
机器人:抓取物体的精确定位
三、全景分割:统一语义与实例
3.1 全景分割的定义
全景分割是Kirillov等人于2018年提出的新任务,旨在统一语义分割和实例分割。其目标是为图像中的每个像素分配一个唯一的标签:如果是"可数物体"(thing),则标签包含实例ID;如果是"不可数区域"(stuff),则只包含类别标签。
全景分割的特点包括:
每个像素有且只有一个标签
没有重叠区域或未定义区域
同时处理thing和stuff类别
3.2 全景分割的评价指标
全景质量(Panoptic Quality, PQ)是全景分割的标准评价指标,定义为:
PQ = ∑(p,g)∈TP IoU(p,g)/|TP| × |TP|/(|TP| + 1/2|FP| + 1/2|FN|)
其中TP、FP、FN分别表示真正例、假正例和假反例。PQ可以分解为识别质量(SQ)和分割质量(RQ)的乘积。
3.3 全景分割的实现方法
全景分割的实现策略主要有三种:
1. 独立方法:分别运行语义分割和实例分割,然后通过启发式规则合并结果
如Panoptic FPN在Mask R-CNN基础上添加语义分割分支
2. 统一方法:设计单一网络直接输出全景分割结果
UPSNet:统一的全景分割网络,共享特征提取
DETR:基于Transformer的端到端方法
3. 转换方法:将一种分割结果转换为另一种
如将实例分割结果作为语义分割的约束条件
3.4 全景分割的挑战与前景
全景分割面临的主要挑战包括:
处理thing和stuff类别的不同特性
大规模标注数据的获取
实时全景分割的实现
随着自动驾驶等应用对场景理解的全面性要求越来越高,全景分割的重要性将日益凸显。
四、技术对比与选择指南
4.1 三种分割技术的对比
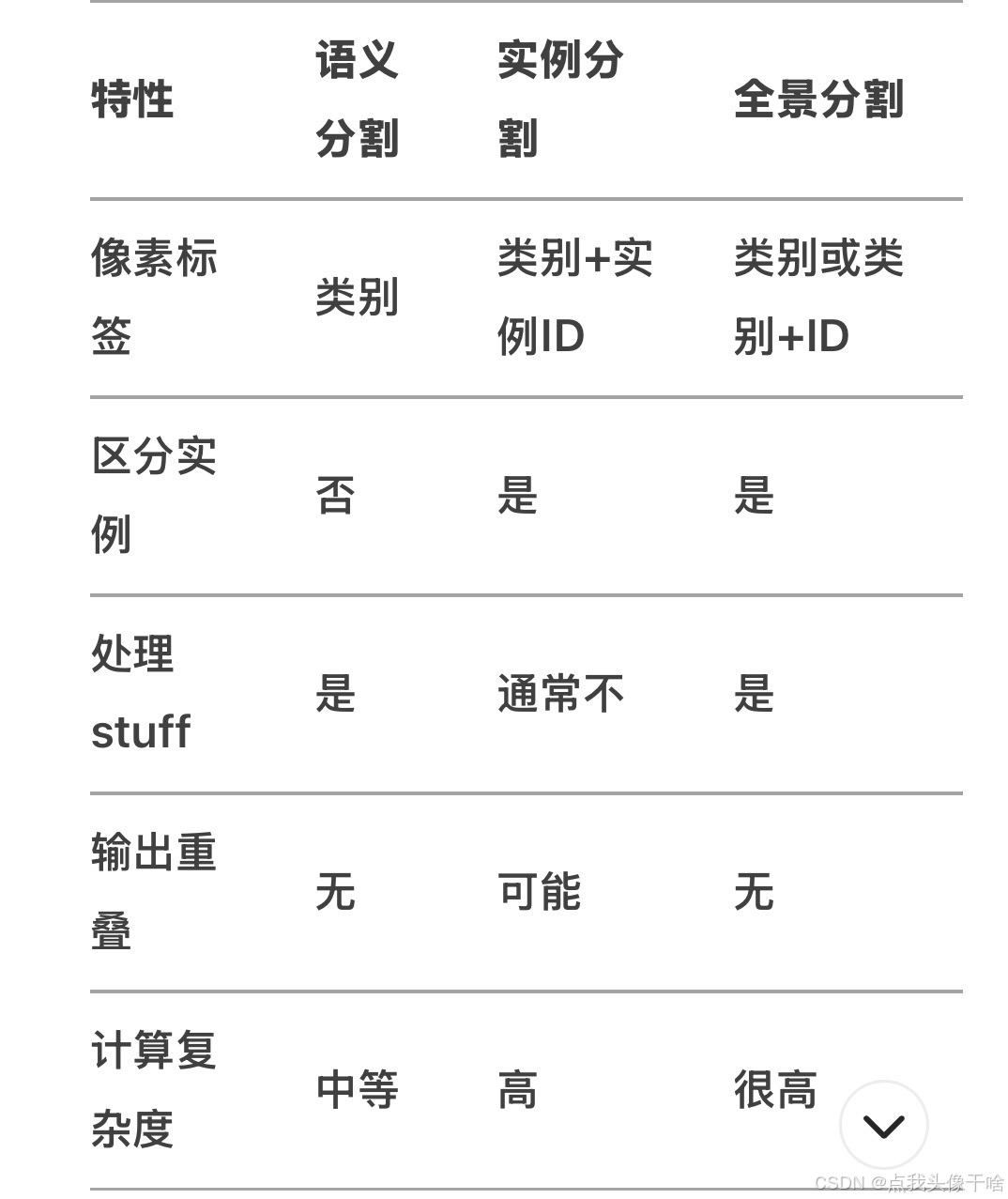
4.2 如何选择合适的分割方法
选择分割方法时应考虑以下因素:
1. 应用需求:
只需要知道"是什么"→语义分割
需要区分个体→实例分割
全面场景理解→全景分割
2. 实时性要求:
实时应用可能需要轻量级语义分割
离线分析可以考虑更精确的实例或全景分割
3. 数据特性:
大量stuff类别→语义或全景分割
密集小物体→实例分割可能更适合
4. 硬件资源:
受限设备优先考虑语义分割
强大GPU可以考虑复杂模型
五、未来发展趋势
图像分割技术仍在快速发展,以下几个方向值得关注:
1. 更高效的架构:神经架构搜索(NAS)和轻量化设计将推动分割模型在边缘设备上的部署
2. 弱监督/自监督学习:减少对昂贵标注数据的依赖,如通过对比学习等方法
3. 多模态融合:结合RGB、深度、热成像等多源数据提升分割性能
4. 视频分割:利用时间连续性提高分割一致性和效率
5. Transformer架构:如Swin Transformer、Segmenter等模型展现出了巨大潜力
6. 3D分割:扩展到点云和体素数据的3D分割将成为自动驾驶和AR/VR的关键技术
结语
从语义分割到实例分割再到全景分割,图像分割技术不断向着更精细、更全面的方向发展。这三种技术各有优势和适用场景,共同构成了计算机视觉理解视觉世界的基础工具链。随着技术的进步,图像分割必将在更多领域发挥关键作用,推动人工智能更好地理解和交互于我们的物理世界。
对于研究者和开发者而言,理解这些技术的原理、特点和适用场景,将有助于在实际问题中选择合适的解决方案。未来,我们期待看到更多创新性的分割方法出现,进一步突破现有技术的局限,开启计算机视觉新的可能性。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 29
29 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)