【路径规划】自适应人工势场算法(Matlab实现)
2. 无人机飞行控制:帮助无人机在有障碍物的飞行空域内,如城市上空、山区等环境,灵活规划飞行路线,避开建筑物、山峰等障碍,并能在飞行任务中应对突发的环境变化或目标变更。3. 提高路径平滑性:在自适应调整过程中,可优化引力和斥力的作用效果,减少机器人路径中的急剧转向和抖动,使路径更加平滑,有利于机器人稳定运行,尤其对于具有惯性或运动学约束的系统更为重要。另一方面,在多机器人或多智能体协同环境下,如何
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、背景与起源
人工势场算法在机器人路径规划等领域有着广泛应用。然而,传统人工势场算法存在一些局限性,例如容易陷入局部最小值、目标不可达等问题。为克服这些不足,自适应人工势场算法应运而生。它在保留人工势场算法基本框架和理念的基础上,引入自适应机制以提升算法性能。
二、算法原理
该算法同样构建引力势场和斥力势场。引力势场促使运动物体向目标点靠近,其大小与物体到目标点的距离相关,距离越远引力越大。斥力势场则由环境中的障碍物产生,当物体靠近障碍物时,斥力迅速增大以避免碰撞。在自适应方面,主要体现在对势场参数的动态调整。例如,根据机器人与障碍物之间的距离、相对速度以及环境的动态变化等因素,实时改变引力和斥力的系数。当机器人处于较为开阔、障碍物较少的区域时,适当增大引力系数,加快向目标点的行进速度;而在障碍物密集区域,则增大斥力系数的敏感度,更谨慎地避开障碍物。
三、优势特点
1. 有效避免局部最小值:通过自适应地调整势场参数,能够使机器人在陷入局部最小值陷阱时,利用参数变化产生的新合力跳出局部最优,继续寻找全局最优路径。 2. 良好的动态适应性:能适应环境的动态变化,如障碍物的移动、新障碍物的出现或目标点的改变。由于参数可根据实时情况调整,算法可快速对这些变化做出反应,重新规划出合理路径。 3. 提高路径平滑性:在自适应调整过程中,可优化引力和斥力的作用效果,减少机器人路径中的急剧转向和抖动,使路径更加平滑,有利于机器人稳定运行,尤其对于具有惯性或运动学约束的系统更为重要。
四、应用领域
1. 机器人导航:无论是室内服务机器人还是室外移动机器人,如工业巡检机器人、物流搬运机器人等,都可利用自适应人工势场算法在复杂多变的环境中规划出安全高效的路径,实现自主导航任务。 2. 无人机飞行控制:帮助无人机在有障碍物的飞行空域内,如城市上空、山区等环境,灵活规划飞行路线,避开建筑物、山峰等障碍,并能在飞行任务中应对突发的环境变化或目标变更。 3. 自动驾驶车辆:在交通场景中,自适应人工势场算法可让自动驾驶汽车在道路上避开其他车辆、行人以及道路施工等障碍物,同时依据交通状况和目的地变化及时调整行驶路径,保障行驶安全与高效。
五、发展与挑战
尽管自适应人工势场算法取得了显著进展,但仍面临一些挑战。一方面,算法的计算复杂度随着自适应机制的加入有所增加,对于资源受限的系统可能会造成一定的性能压力,需要进一步优化算法结构或采用高效的计算硬件来平衡性能与资源消耗。另一方面,在多机器人或多智能体协同环境下,如何协调各智能体的自适应人工势场参数,以实现高效的群体路径规划与协作,仍然是一个有待深入研究的课题。
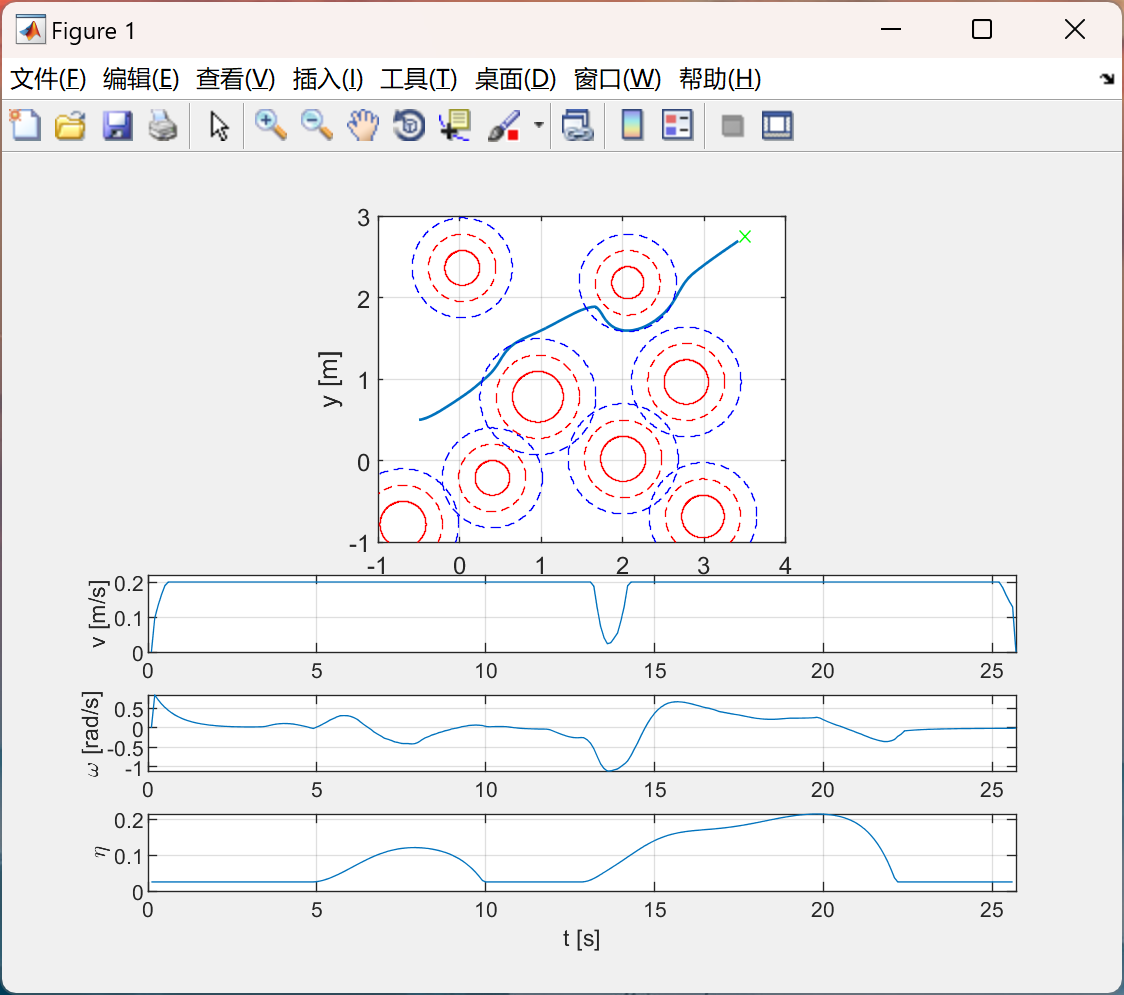
📚2 运行结果
部分函数代码:
function simout = ASAPF_LocalPathPlanning()
% Initial position and orientation
x = -0.5;
y = 0.5;
theta = 0;
% Goal position
x_goal = 3.5;
y_goal = 2.75;
position_accuracy = 0.1;
% Sampling period
dT = 0.1;
% Generate obstacles
Obstacle_count = 8;
angles = linspace(0, 2*pi, 360)';
obstacle = zeros(Obstacle_count, length(angles), 2);
obstacle_02 = zeros(Obstacle_count, length(angles), 2);
obstacle_03 = zeros(Obstacle_count, length(angles), 2);
obstacle_04 = zeros(Obstacle_count, length(angles), 2);
obstacle_05 = zeros(Obstacle_count, length(angles), 2);
c = zeros(Obstacle_count,2);
r = zeros(Obstacle_count,1);
for i=1:Obstacle_count
while 1
c(i,:) = 4*rand(1,2) - 1;
r(i) = 0.25*rand() + 0.15;
if norm([x y] - c(i,:)) > (r(i) + 0.35) && norm([x_goal y_goal] - c(i,:)) > (r(i) + 0.35)
if i == 1, break; end
[idx, dist] = dsearchn([c(1:(i-1),1) c(1:(i-1),2)], c(i,:));
if dist > (r(idx)+r(i)+0.1)
break;
end
end
end
obstacle(i,:,:) = [r(i) * cos(angles)+c(i,1) r(i)*sin(angles)+c(i,2) ];
r(i) = r(i) + 0.2;
obstacle_02(i,:,:) = [r(i) * cos(angles)+c(i,1) r(i)*sin(angles)+c(i,2) ];
r(i) = r(i) + 0.2;
obstacle_04(i,:,:) = [r(i) * cos(angles)+c(i,1) r(i)*sin(angles)+c(i,2) ];
end
% Simulation
simTimeMax = 600;
simout = AdaptiveSafeArtificialPotentialField(0.4, 2e0 *dT, x, y, theta, x_goal, y_goal, position_accuracy, obstacle, dT, simTimeMax);
% Plot it
figure(1); subplot(6,1,1:3);
cla; hold on; grid on; box on;
daspect([1 1 1]);
xlim([-1,4]); ylim([-1 3]); xlabel("x [m]"); ylabel("y [m]");
box on; hold on;
plot(simout.X(1:simout.t), simout.Y(1:simout.t), 'Color',[0 0.4470 0.7410], 'LineWidth', 1); % Plot traveled path
plot(x_goal, y_goal, 'xg');
for i=1:Obstacle_count
plot(obstacle(i,:,1), obstacle(i,:,2), '-r');
plot(obstacle_02(i,:,1), obstacle_02(i,:,2), '--r');
plot(obstacle_04(i,:,1), obstacle_04(i,:,2), '--b');
end
drawnow;🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]唐宇洋,郑恩辉,邱潇.基于优化双向A*与人工势场法的无人机三维航迹规划[J].空军工程大学学报,2024,25(05):69-75.
[2]洪道玉,陈巍,陈国军,等.融合人工势场和RRT算法的水下机械臂自适应路径规划[J].农业装备与车辆工程,2024,62(08):99-103.
🌈4 Matlab代码实现


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 16
16 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)