机器人路径规划2 Floyd
Floyd算法介绍是解决给定的加权图中顶点间的最短路径的一种算法,可正确处理有向图的最短路径问题是一个基于贪心、动态规划,求一个图中 所有点到所有点 最短路径的算法Floyd算法详解 通俗易懂最短路径问题—Floyd算法详解Floyd.mclcclearclose allt0=cputime;%% 栅格界面、场景定义% 行数和列数rows = 20;cols = 30;[field, cmap]
·
Floyd 算法介绍
是解决给定的加权图中顶点间的最短路径的一种算法,可正确处理有向图的最短路径问题
是一个基于贪心、动态规划,求一个图中 所有点到所有点 最短路径的算法
Floyd算法详解 通俗易懂
最短路径问题—Floyd算法详解
Floyd.m
clc
clear
close all
t0=cputime;
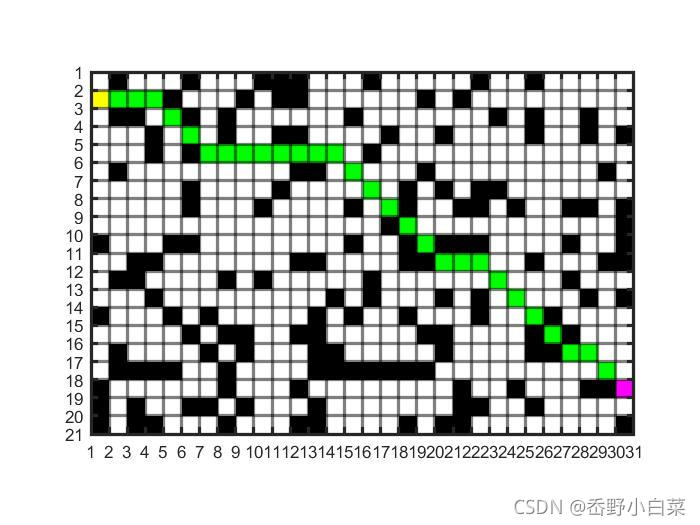
%% 栅格界面、场景定义
% 行数和列数
rows = 20;
cols = 30;
[field, cmap] = defColorMap(rows, cols);
% 起点、终点、障碍物区域
startPos = 2;
goalPos = rows * cols - 2;
field(startPos) = 4;
field(goalPos) = 5;
%% 算法初始化
n = rows * cols; % 栅格节点总个数
map = inf(n, n); % 所有节点间的距离map
path = cell(n ,n); % 存放对应的路径
for startNode = 1 : n
if field(startNode) ~= 2
neighborNodes = getNeighborNodes(rows, cols, startNode, field);
for i = 1 : 8
if ~(isinf(neighborNodes(i, 1)) || isinf(neighborNodes(i, 2)))
neighborNode = neighborNodes(i, 1);
map(startNode, neighborNode) = neighborNodes(i, 2);
path{startNode, neighborNode} = [startNode, neighborNode];
end
end
end
end
for i = 1 : n
for j = 1 : n
if j ~=i
for k = 1 : n
if k ~= i && k ~= j
if map(j, i) + map(i, k) < map(j, k)
map(j, k) = map(j, i) + map(i, k);
path{j, k} = [path{j, i}, path{i, k}(2 : end)];
end
end
end
end
end
end
elapsed_time=cputime-t0
%% 画栅格界面
% 找出目标最优路径
path_opt = path{startPos, goalPos};
field(path_opt(2 : end - 1)) = 6;
% 画栅格图
image(1.5, 1.5, field);
grid on;
set(gca, 'gridline', '-', 'gridcolor', 'k', 'linewidth', 2, 'GridAlpha', 0.5);
set(gca, 'xtick', 1 : cols + 1, 'ytick', 1 : rows + 1);
axis image;

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)