[3D数学基础:图形与游戏开发]读书笔记 第8章(矩阵和线性变换、旋转、缩放、投影、镜像、切变、变换组合、变换分类)
第8章 矩阵和线性变换线性变换 重要的性质就是不包括平移,线性变换可以使用3x3矩阵表示,包含平移的叫做仿射变换考虑一下3x3的矩阵到底可以变换什么?变换一个物体的坐标和变换坐标系这两个其实是等价的2D中的旋转围绕点旋转3D旋转 围绕轴旋转,可以由上面的2D延伸出来,假设z轴方向向里,那么其实上面的公式就是沿着z轴旋转,那么公式如下,并且绕x、y都可以由此推导出来3D中任意轴旋转上面的3D是按照标
·
第8章 矩阵和线性变换
线性变换 重要的性质就是不包括平移,线性变换可以使用3x3矩阵表示,包含平移的叫做仿射变换- 考虑一下3x3的矩阵到底可以变换什么?
- 变换一个物体的坐标和变换坐标系这两个其实是等价的
2D中的旋转围绕点旋转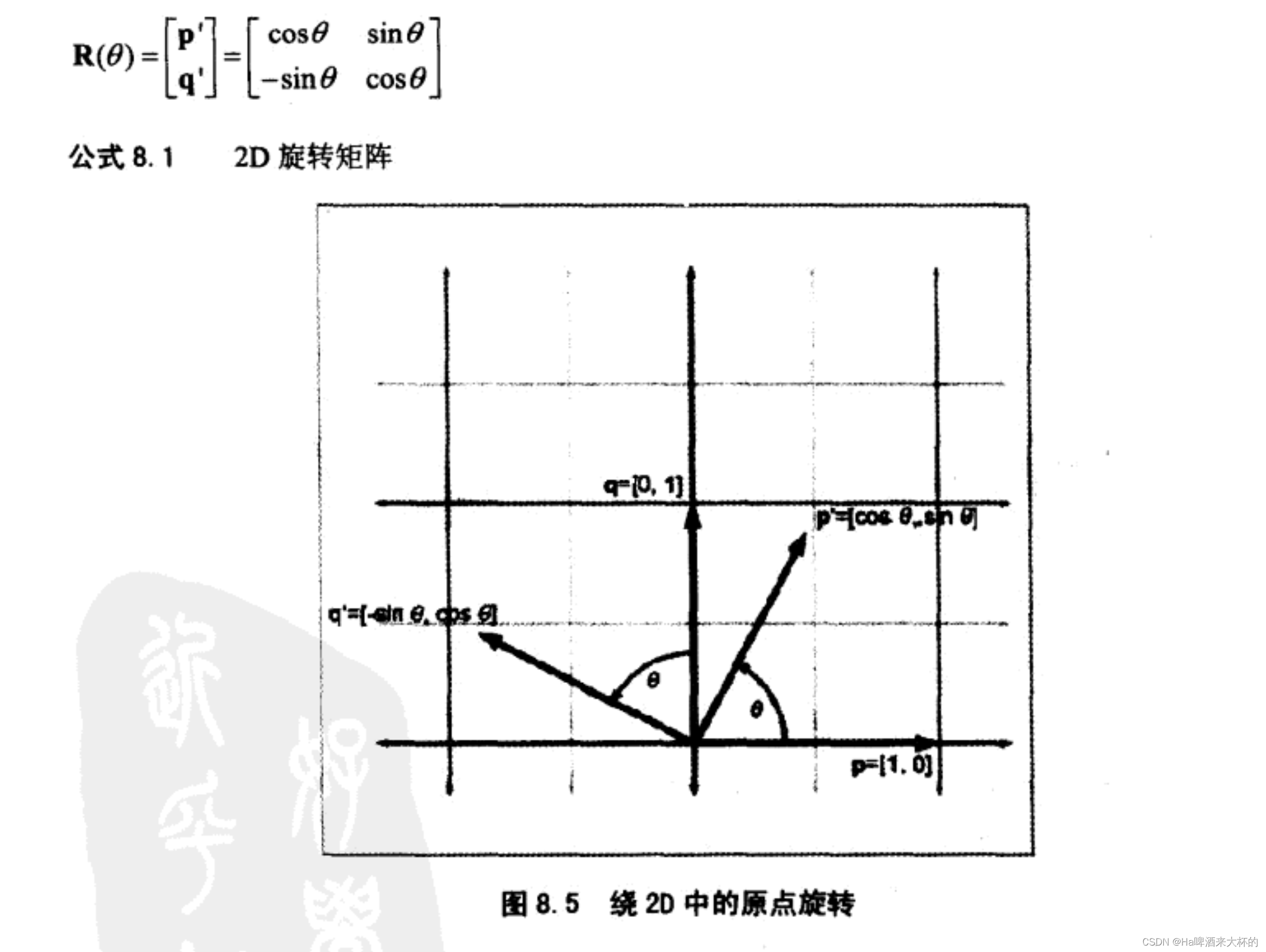
3D旋转围绕轴旋转,可以由上面的2D延伸出来,假设z轴方向向里,那么其实上面的公式就是沿着z轴旋转,那么公式如下,并且绕x、y都可以由此推导出来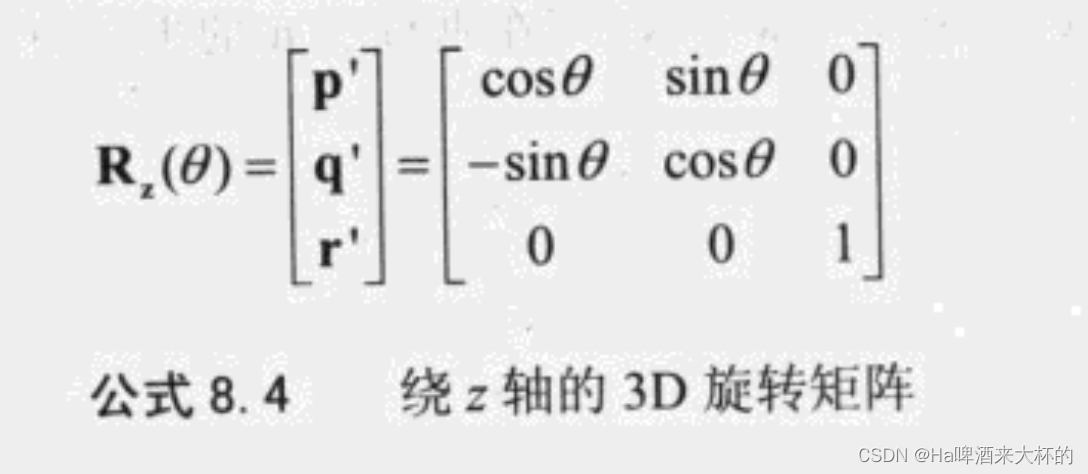
3D中任意轴旋转
- 上面的3D是按照标准轴旋转的,如何延伸出围绕任意轴旋转的矩阵呢?
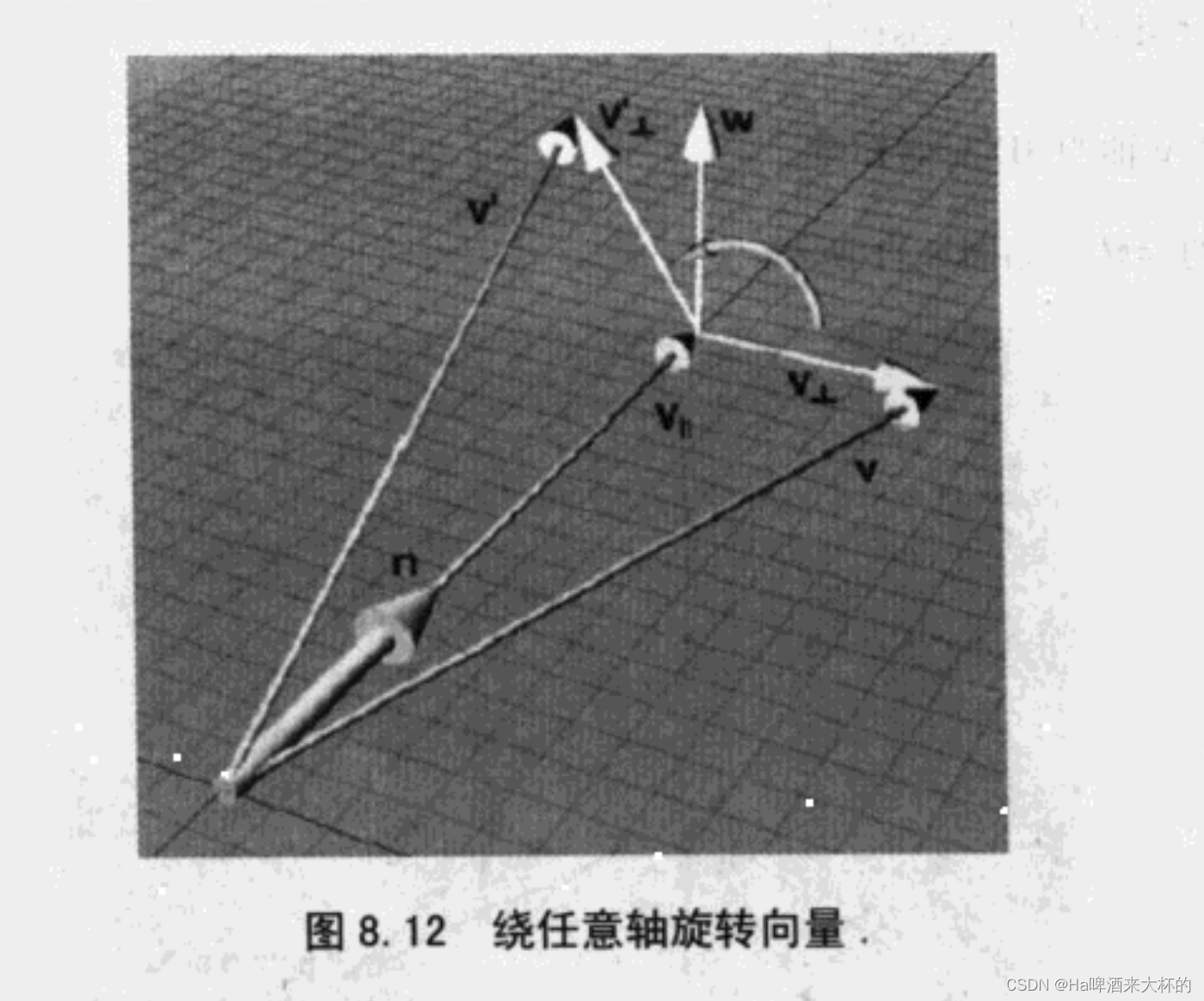
- 上图是v向量绕n(单位向量)旋转,需要求出v’向量
- 首先将向量
v'分解为平行于n的向量v∥',和垂直于n的向量v⟂'v∥平行于n所以不受影响,我们只要算出v⟂’就可以通过向量加法获得v’ v∥是v在n向量上的投影,根据之前学的投影公式可以算出来,进而根据向量减法得出v⟂- 辅助向量
w,通过v⟂和n的叉乘算出,方向根据左手法则(向量首尾相连为顺时针)得知如图向上,w向量的长度v⟂和n向量组合成的平行四边形面积,因为n为单位向量,所以w和v⟂向量长度相同 - 计算向量都有了,怎样表示
v⟂'向量,上面我们知道w和v⟂向量垂直并且长度相同,所以可以视为一个2维的坐标轴,那么v⟂'向量在这个坐标上,并且角度也知道,就可以根据2D的表示方式,如下公式(这个可以好好想一下,书上没有解释这个公式怎么来的)v⊥′=v⊥cosθ+wsinθv⟂' = v⟂cos\theta + wsin\thetav⊥′=v⊥cosθ+wsinθ - 最后只需要把步骤2、3的向量代入就可以计算出来
v⟂',然后根据向量加法算出v',算出来很长一坨,就不写在这了,想看的去看书。
缩放
- 缩放分为
均匀缩放和非均匀缩放 - 缩放将会导致
变长、变短、正交投影、镜像 - 沿轴进行缩放的正好就是对角矩阵
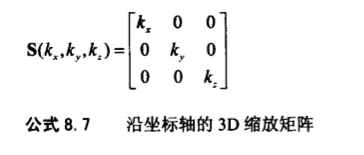
沿任意轴缩放
- 求
v沿着n进行缩放
- 首先将
v分解为平行n的向量v∥和垂直于n的向量v⟂,根据2D缩放情况,垂直于缩放方向的向量不受缩放影响,所以需要算出v∥',然后和v⟂向量加法就行 v∥' = kv∥,v∥就是投影可以根据投影公式求出,下面图是怎么根据v的等式求得变化矩阵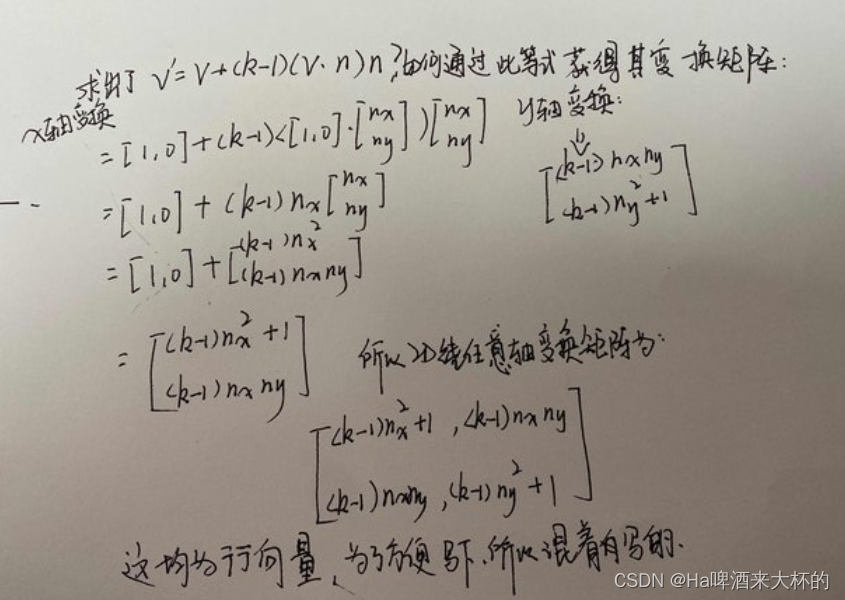
正交投影(平移投影)
向坐标轴或平面投影下图可以看到这个矩阵会将z轴的长度变为0,xy轴的不变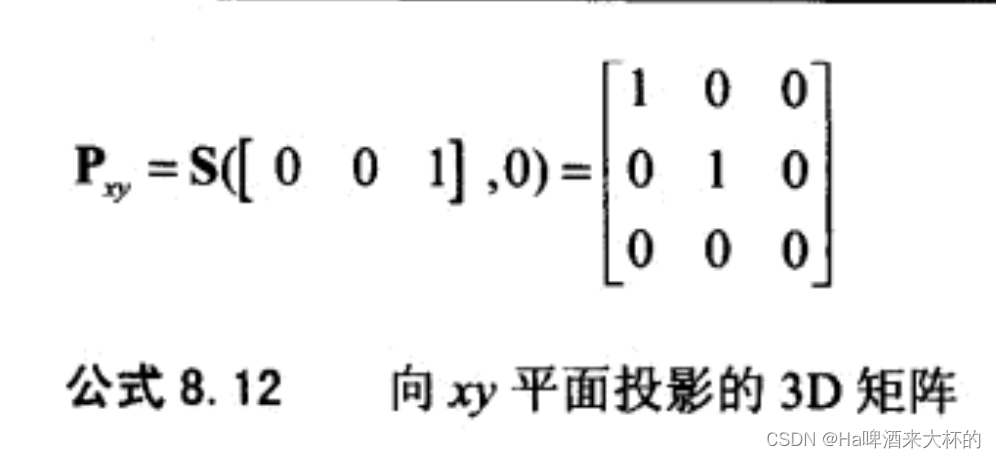
向任意直线(轴)或平面投影
- 上面求沿任意轴缩放,那么只需要将缩放因子
k=0就可以得到沿任意轴的投影,3D沿平面投影同理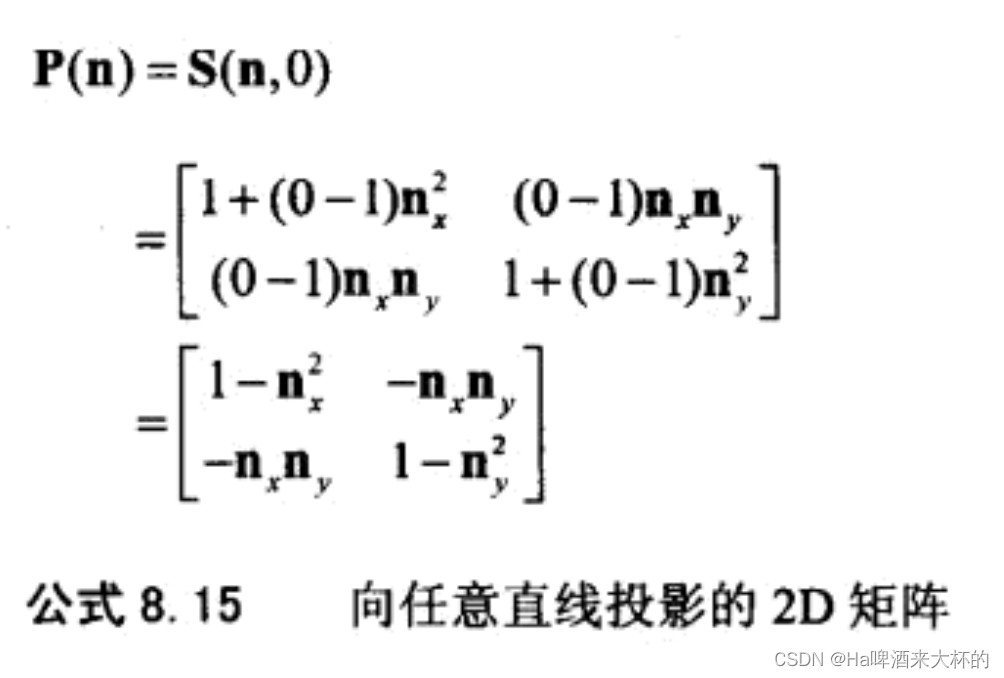
镜像
- 沿直线或者平面进行
翻折 - 上面求沿任意轴缩放,那么只需要将缩放因子
k=-1就可以得到沿任意轴的投影,3D沿平面投影同理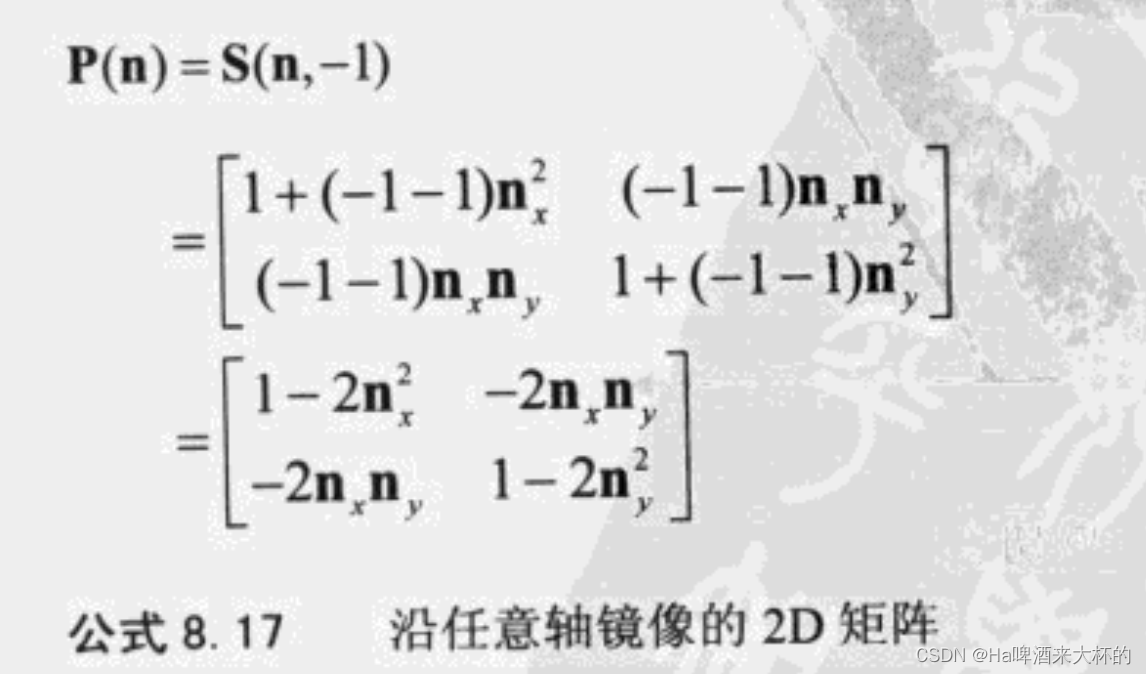
切变
- 切变是一种坐标系扭曲变换,
面积和体积保持不变,这个比较抽象看图吧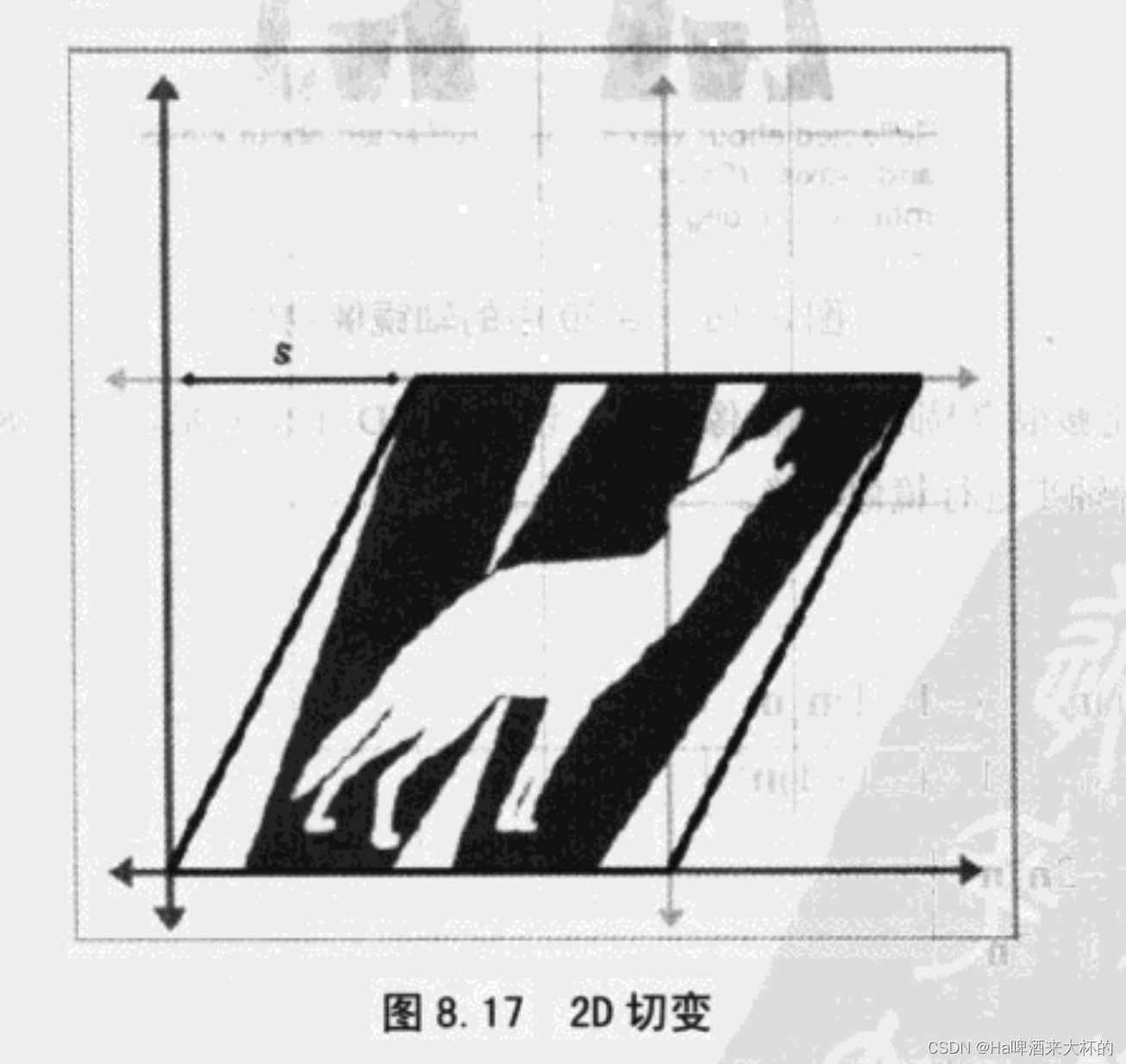
上面的变换矩阵为
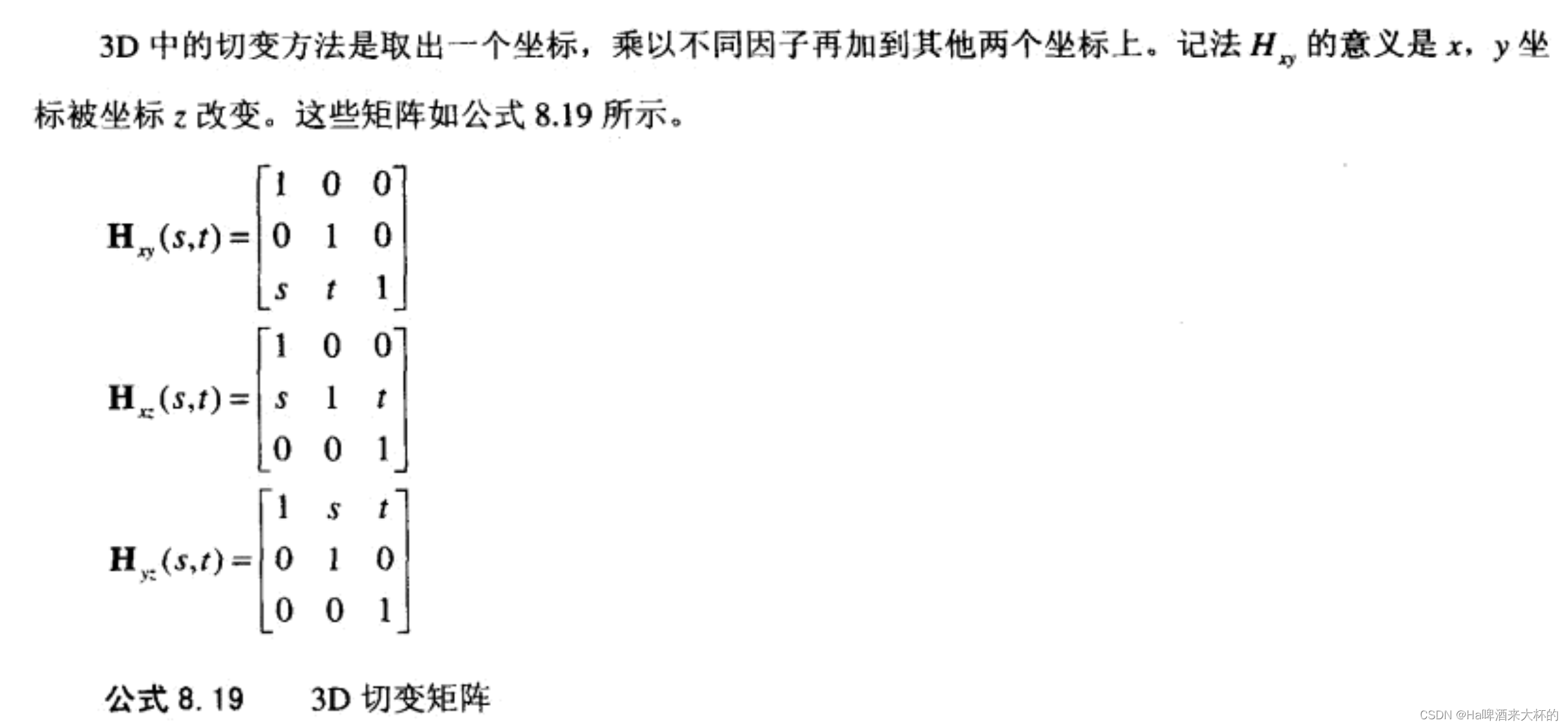
上面那个矩阵比如拿[0,1]也就是y轴单位向量乘这个矩阵得到的向量就是[s, 1],x轴单位向量[1,0]乘矩阵还是[1,0] - 下面是3D的切变矩阵
变换的组合
首先带着疑问,有一个任意方向位置的物体,渲染到任意方向任意位置的摄像机中,怎么渲染?具体就是先将物体变换到世界坐标系,然后从世界坐标系变换到摄像机坐标系,公式如下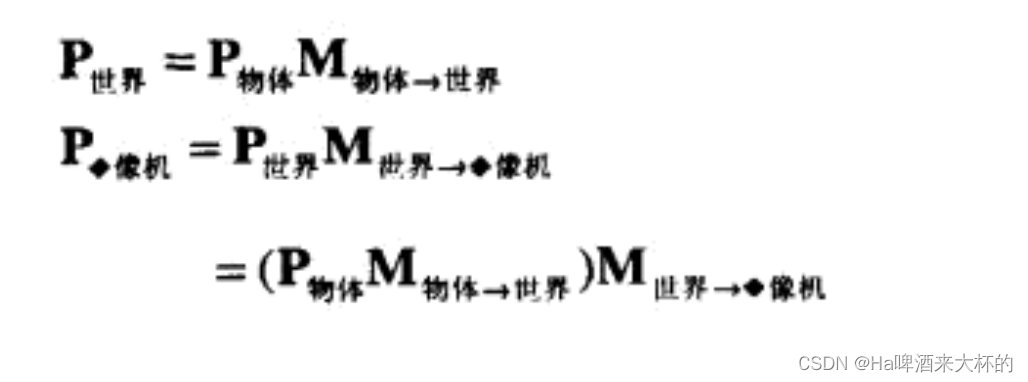
第7章得到的一个重要结论:矩阵的行向量就是矩阵变换后的基向量,可以看下图,并且可以单独以A的行向量于B相乘得到的就是B的行向量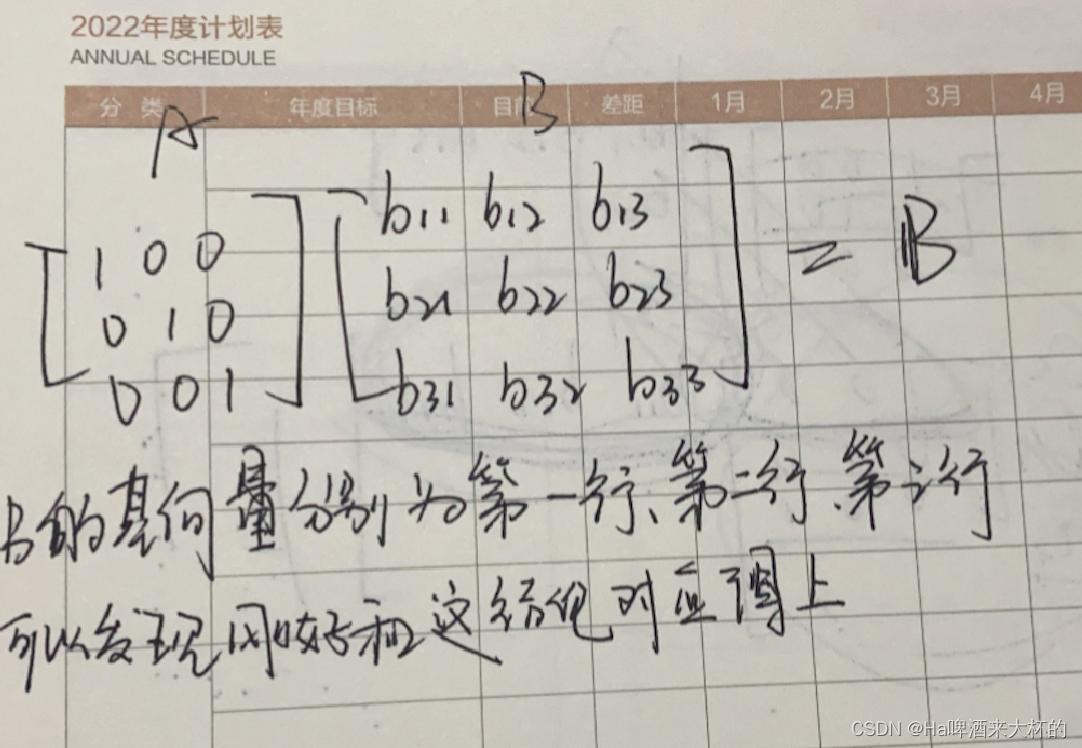
变换的分类
线性变换的重要引理
- 这个定义很像我们在操作矩阵基向量情况
F(a) = aM M为任意方阵 a为向量
F(a + b) = (a + b)M
F(a + b) = aM + bM
F(a + b) = F(a) + F(b) - F(ka) = kaM
F(ka) = kF(a) - 零向量变换的结构仍然为零向量
仿射变换是指进行线性变换然后进行平移,所以仿射变换是线性变换的超集,所有线性变换都是仿射变换,但是所有仿射变换不一定是线性变换任何具有v' = vM + b形式的都是仿射变换可逆变换存在一个逆变换,可以取消原变换
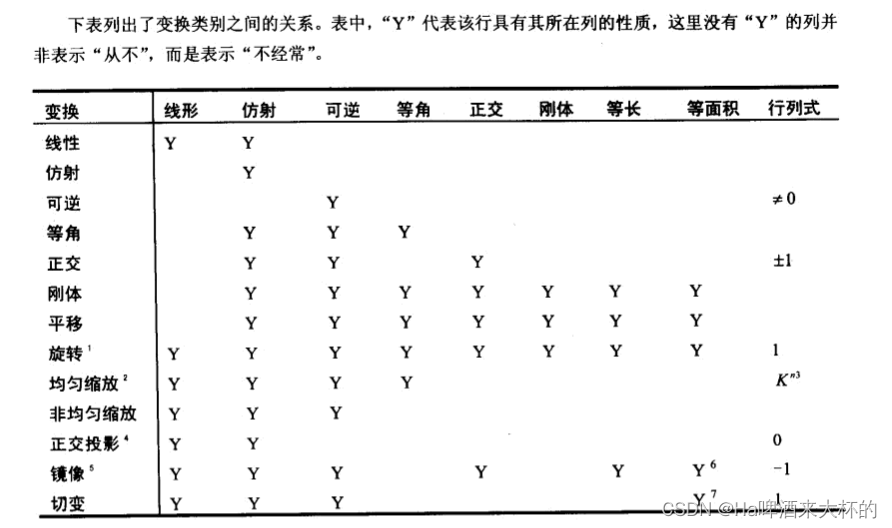
– 投影无法取消,投影放弃了某个维度的信息,无法复原,这个可以自己用矩阵乘一下等角变换如果两个向量变换后的角度不变则为等角变换,所有平移旋转和均匀缩放都是等角变换,镜像不是等角变换,因为方向发生了变化。正交变换的基本思想是轴保持互相垂直,并且不进行缩放变换,并且正交变换非常容易求出逆,平移、旋转、镜像是仅有的正交变换刚体变换只改变位置与方向,镜像不是刚体变换- 下面是变换总结表

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 0
0 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)