深蓝路径规划-L6
mini snap可以获得一个经过路径的点,但是可能会超调(在其他点触碰障碍)主要有两种解决思路:软约束、硬约束;软约束是将约束加在目标函数里,让目标远离边界条件。硬约束是要求全局满足。
·
mini snap可以获得一个经过路径的点,但是可能会“超调”(在其他点触碰障碍)
主要有两种解决思路:软约束、硬约束;
软约束是将约束加在目标函数里,让目标远离边界条件。硬约束是要求全局满足。
一、硬约束
硬约束:飞行走廊;基本用凸的进行表示,比如方块。
约束两段轨迹连接点在重叠的飞行走廊内,但是这并不能保障轨迹不跑出飞行走廊。只能通过后验性迭代检查进行约束,还有动力学约束。
一般是通过检查极值去重新迭代约束条件。四次以内用求根公式,四次以外用伴随矩阵的特征值,matlab里面函数名为root。
方法:贝塞尔曲线、找很多点和框、混合整数优化、
二、Bezier Curve Optimization
普通多项式可以通过矩阵M一一对应到贝赛尔曲线;
特点:
①只通过第一个和最后一个,不通过中间几个控制点。
②总是被外面的凸包所包围。由凸包定义的贝塞尔曲线一定被限制在凸包里面。
③求导后仍然是贝塞尔曲线,并可以用线性表示。
④贝塞尔曲线的时间都是定义在[0,1]上的。
好处是可以直接求解,不需要迭代。
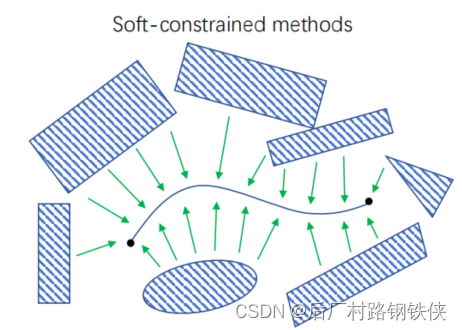
三、软约束
用一种虚拟的力将轨迹“推”至安全区域。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 1
1 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)