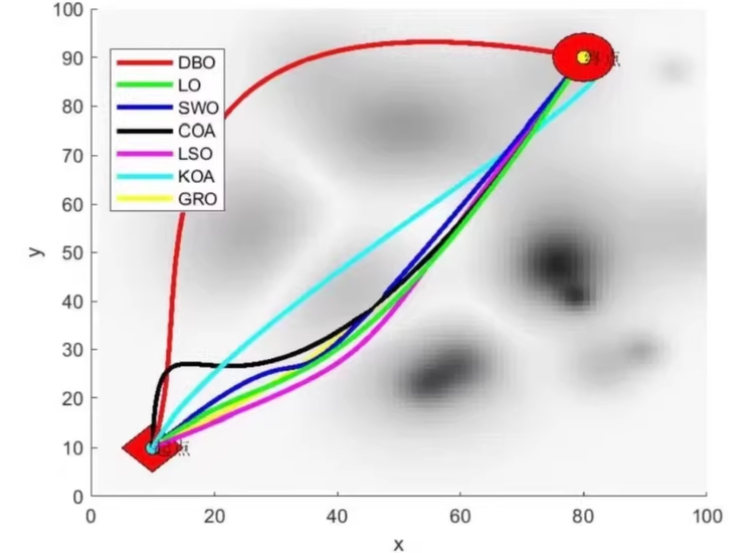
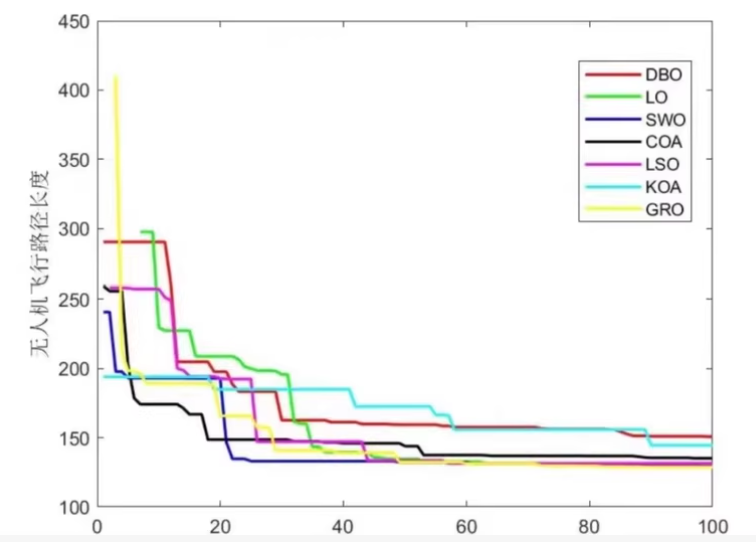
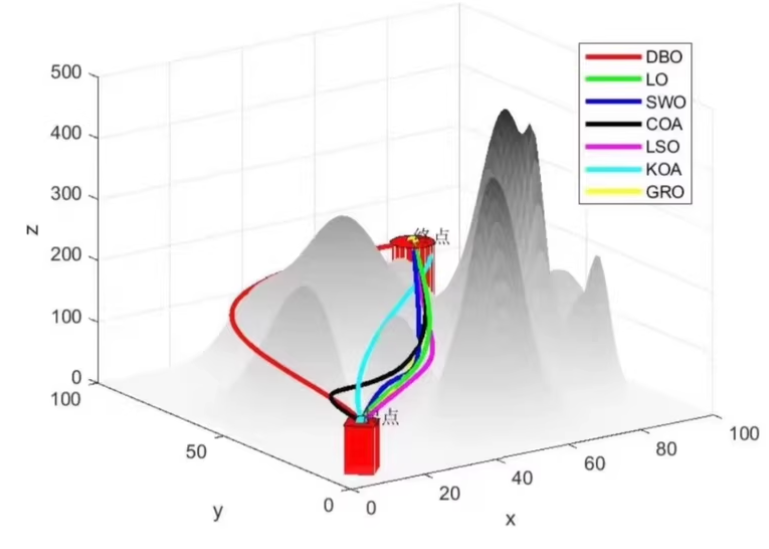
无人机多编队路径规划,自主避障
无人机多编队路径规划,自主避障三维空间无人机集群编队控制,避障,目标追踪无人机开发matlab仿真,支持多旋翼飞行器(包含四轴和六轴)、Ros无人机仿真,具有Slam导航、定位、路径规划、自主避障等功能。ROS,Gazebo,PX4无人机仿真环境Ubuntu18.04,实现圆轨迹、8轨迹飞行无人机、无人车路径规划,避障,无人机集群飞行① 四旋翼编队控制:包括目标分配、全局和局部路径规划② 无多人机
无人机多编队路径规划,自主避障
三维空间无人机集群编队控制,避障,目标追踪
无人机开发matlab仿真,支持多旋翼飞行器(包含四轴和六轴)、Ros无人机仿真,具有Slam导航、定位、路径规划、自主避障等功能。
ROS,Gazebo,PX4无人机仿真环境
Ubuntu18.04,实现圆轨迹、8轨迹飞行
无人机、无人车路径规划,避障,无人机集群飞行
① 四旋翼编队控制:包括目标分配、全局和局部路径规划
② 无多人机模拟复杂机制和动态行为
③ 单机模拟,路径跟随、规划;无人机群仿真控制
以下示例代码仅供参考
无人机多编队路径规划和自主避障是一个复杂的问题,涉及路径规划算法、避障策略以及编队控制。以下是一个简化的代码示例,使用 Python 和 ROS(Robot Operating System)环境来实现无人机的路径规划与避障功能。
使用以下技术:
- 路径规划:A* 算法或 RRT(快速随机树)算法。
- 避障:基于激光雷达或深度相机的动态避障。
- 编队控制:简单的领导者-跟随者模型。
环境准备
确保你已经安装了 ROS 和相关依赖库(如 rospy 和 tf)。以下代码是一个简化的示例,假设我们使用 Gazebo 模拟器进行仿真。
—
代码实现
1. 路径规划 - A* 算法
以下是基于网格地图的 A* 算法实现:
import heapq
class Node:
def __init__(self, position, parent=None):
self.position = position
self.parent = parent
self.g = 0 # Cost from start to current node
self.h = 0 # Heuristic cost to goal
self.f = 0 # Total cost (g + h)
def __lt__(self, other):
return self.f < other.f
def astar(grid, start, goal):
open_list = []
closed_set = set()
start_node = Node(start)
goal_node = Node(goal)
heapq.heappush(open_list, start_node)
while open_list:
current_node = heapq.heappop(open_list)
closed_set.add(current_node.position)
if current_node.position == goal_node.position:
path = []
while current_node:
path.append(current_node.position)
current_node = current_node.parent
return path[::-1]
neighbors = [(0, 1), (1, 0), (0, -1), (-1, 0)] # 4-connected grid
for dx, dy in neighbors:
neighbor_pos = (current_node.position[0] + dx, current_node.position[1] + dy)
if (
neighbor_pos[0] < 0 or neighbor_pos[0] >= len(grid) or
neighbor_pos[1] < 0 or neighbor_pos[1] >= len(grid[0]) or
grid[neighbor_pos[0]][neighbor_pos[1]] == 1 or
neighbor_pos in closed_set
):
continue
neighbor_node = Node(neighbor_pos, current_node)
neighbor_node.g = current_node.g + 1
neighbor_node.h = abs(neighbor_pos[0] - goal_node.position[0]) + abs(neighbor_pos[1] - goal_node.position[1])
neighbor_node.f = neighbor_node.g + neighbor_node.h
if any(neighbor_pos == n.position and neighbor_node.g >= n.g for n in open_list):
continue
heapq.heappush(open_list, neighbor_node)
return None
2. 避障 - 动态窗口法(DWA)
动态窗口法是一种常用的局部避障算法:
def dwa_control(x, goal, obstacles):
# 参数设置
max_speed = 1.0
max_yaw_rate = 1.57
dt = 0.1
speed_resolution = 0.1
yaw_rate_resolution = 0.1
predict_time = 3.0
def calc_dynamic_window(x):
Vs = [0, max_speed, -max_yaw_rate, max_yaw_rate]
Vd = [x[3] - speed_resolution, x[3] + speed_resolution,
x[4] - yaw_rate_resolution, x[4] + yaw_rate_resolution]
return [max(Vs[0], Vd[0]), min(Vs[1], Vd[1]),
max(Vs[2], Vd[2]), min(Vs[3], Vd[3])]
def motion(x, u, dt):
x[0] += u[0] * np.cos(x[2]) * dt
x[1] += u[0] * np.sin(x[2]) * dt
x[2] += u[1] * dt
x[3] = u[0]
x[4] = u[1]
return x
def calc_trajectory(x_init, v, w):
x = np.array(x_init)
trajectory = np.array(x)
time = 0
while time <= predict_time:
x = motion(x, [v, w], dt)
trajectory = np.vstack((trajectory, x))
time += dt
return trajectory
def calc_obstacle_cost(trajectory, obstacles):
for ox, oy in obstacles:
dx = trajectory[:, 0] - ox
dy = trajectory[:, 1] - oy
dist = np.sqrt(dx**2 + dy**2)
if np.min(dist) < 0.5: # 安全距离
return float('inf')
return 0
dw = calc_dynamic_window(x)
best_u = [0, 0]
best_trajectory = None
min_cost = float('inf')
for v in np.arange(dw[0], dw[1], speed_resolution):
for w in np.arange(dw[2], dw[3], yaw_rate_resolution):
trajectory = calc_trajectory(x, v, w)
to_goal_cost = np.linalg.norm(trajectory[-1, :2] - goal[:2])
ob_cost = calc_obstacle_cost(trajectory, obstacles)
final_cost = to_goal_cost + ob_cost
if final_cost < min_cost:
min_cost = final_cost
best_u = [v, w]
best_trajectory = trajectory
return best_u, best_trajectory
3. 编队控制 - 领导者-跟随者模型
以下是一个简单的编队控制逻辑:
def formation_control(leader_position, follower_positions, desired_distances):
control_commands = []
for i, follower_pos in enumerate(follower_positions):
desired_pos = leader_position + desired_distances[i]
error = desired_pos - follower_pos
velocity = error * 0.5 # 比例控制器
control_commands.append(velocity)
return control_commands
整合到 ROS 中
将上述模块整合到 ROS 的节点中,并通过 rospy 发布控制命令和接收传感器数据。
import rospy
from geometry_msgs.msg import Twist, PoseStamped
def drone_controller():
rospy.init_node('drone_controller', anonymous=True)
pub = rospy.Publisher('/cmd_vel', Twist, queue_size=10)
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 获取传感器数据并更新路径规划
path = astar(grid_map, start, goal)
velocity_command = dwa_control(current_state, goal, obstacles)
# 发布控制命令
cmd = Twist()
cmd.linear.x = velocity_command[0]
cmd.angular.z = velocity_command[1]
pub.publish(cmd)
rate.sleep()
总结
以上代码展示了无人机多编队路径规划与自主避障的基本框架,包括路径规划(A*)、避障(DWA)和编队控制(领导者-跟随者模型)。在实际应用中,还需要结合具体硬件平台和传感器数据进行优化。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 4
4 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)