深蓝学院第四章路径规划——满足动力学约束(kinodynamic)的路径规划算法
深蓝学院第四章路径规划——满足动力学约束(kinodynamic)的路径规划算法个人开发学习总结
·
State Lattice Search
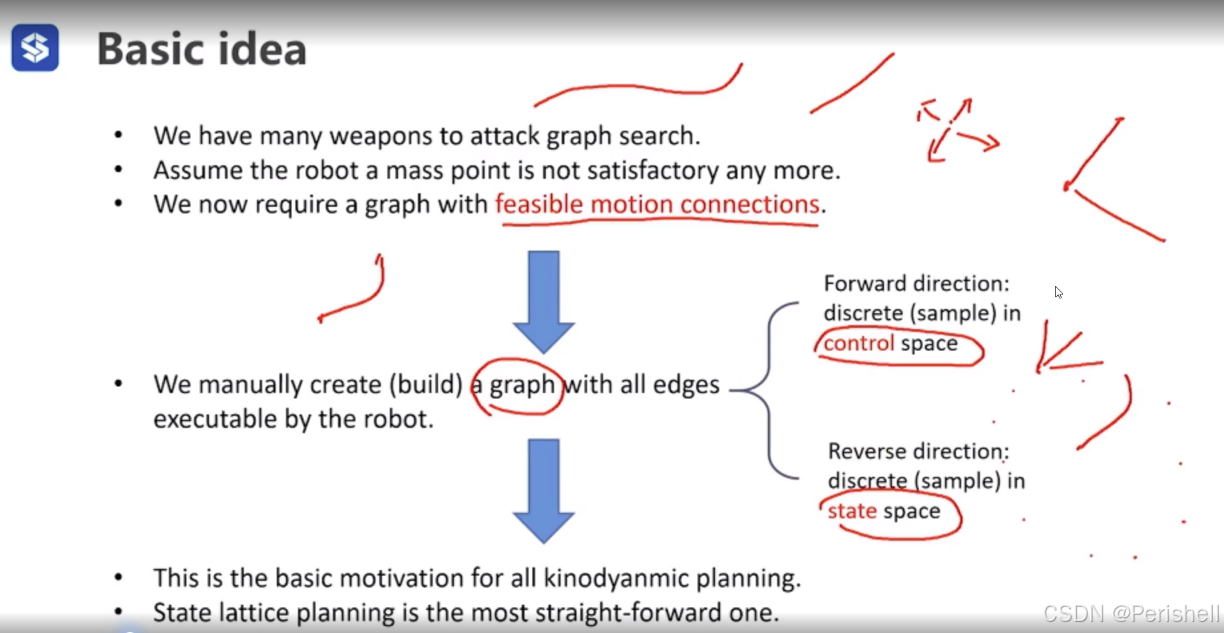
两个角度:控制空间的角度正向的去找到离散的空间,状态空间的角度逆向的去找离散的状态
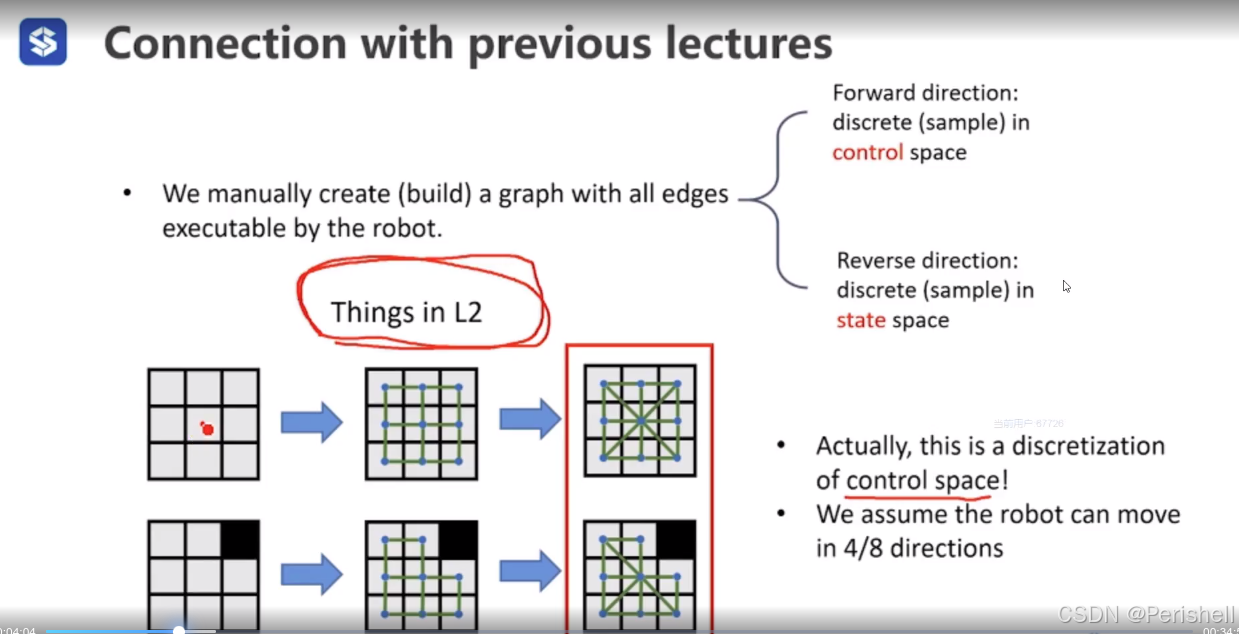
栅格是控制空间的离散化:
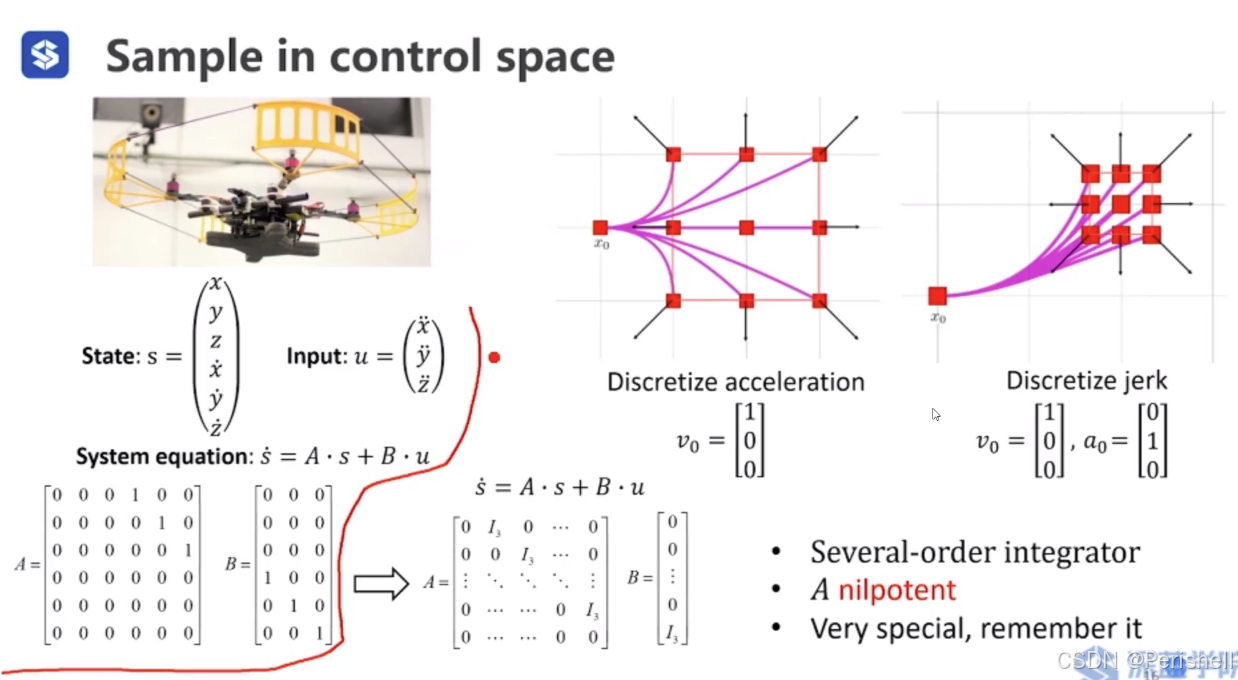
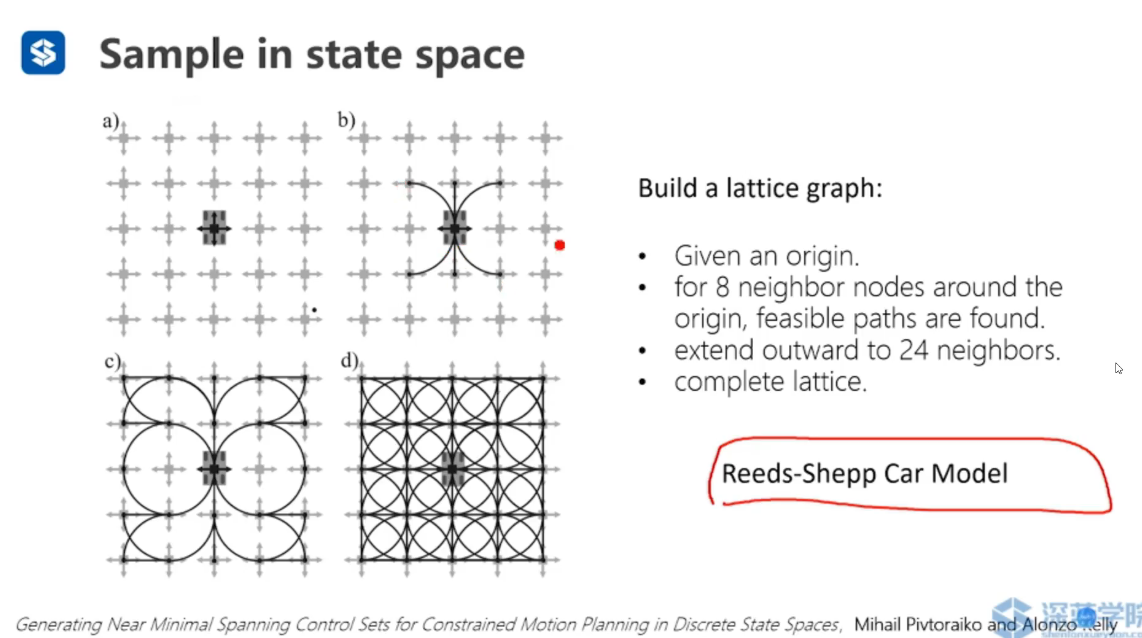
采样方法是状态空间中的离散化:
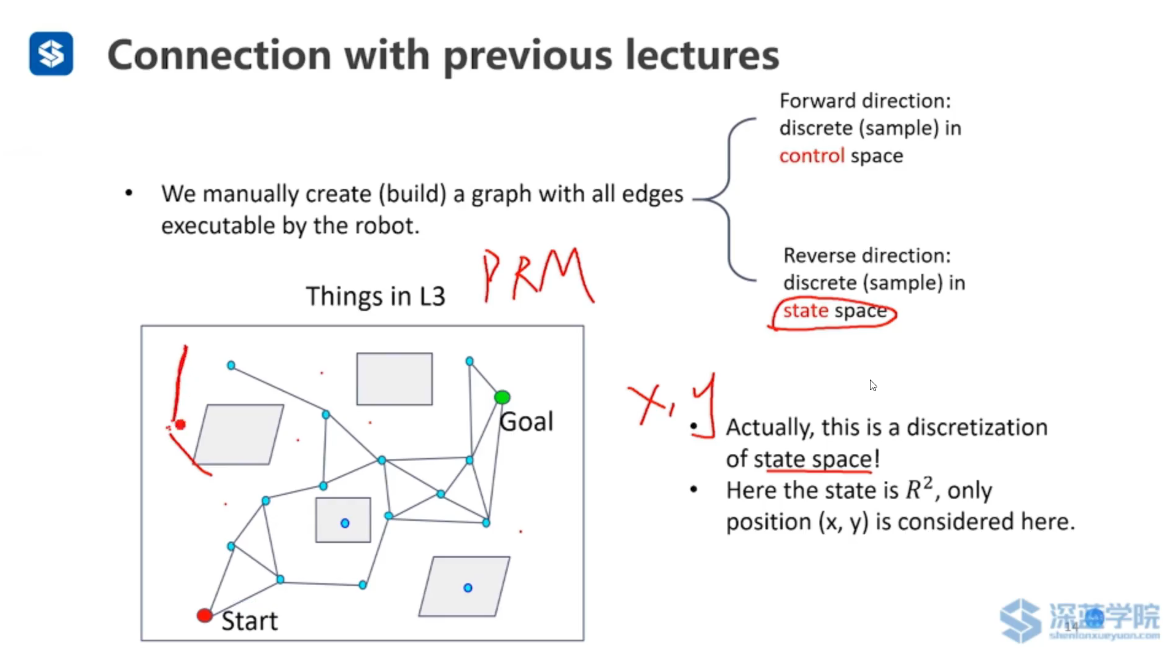
Lattice Graph:
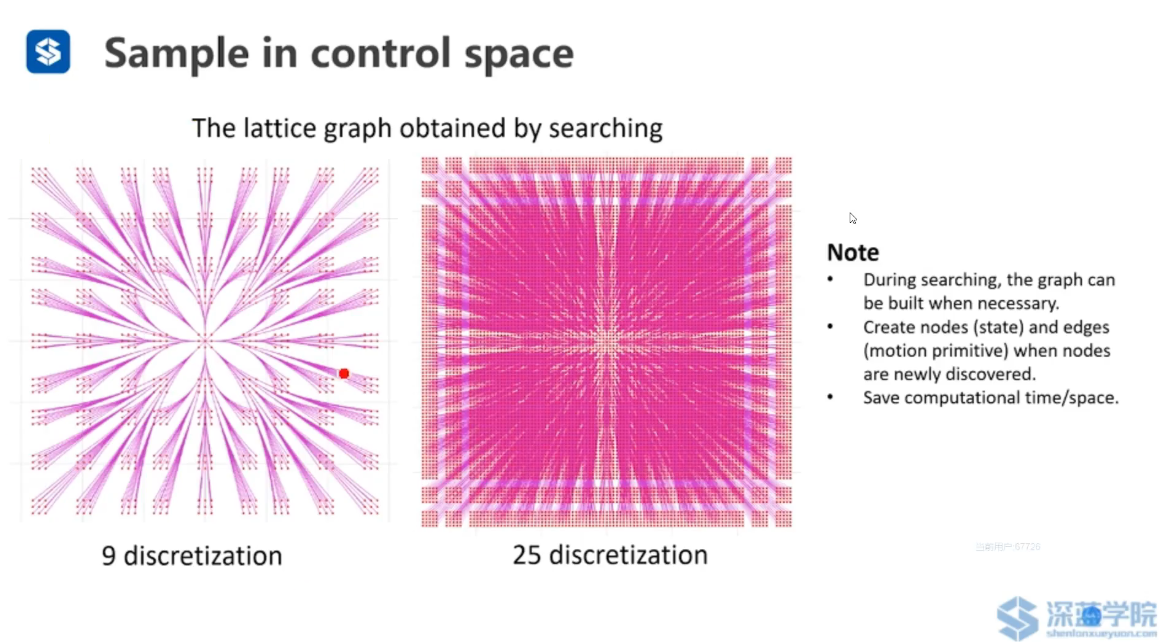
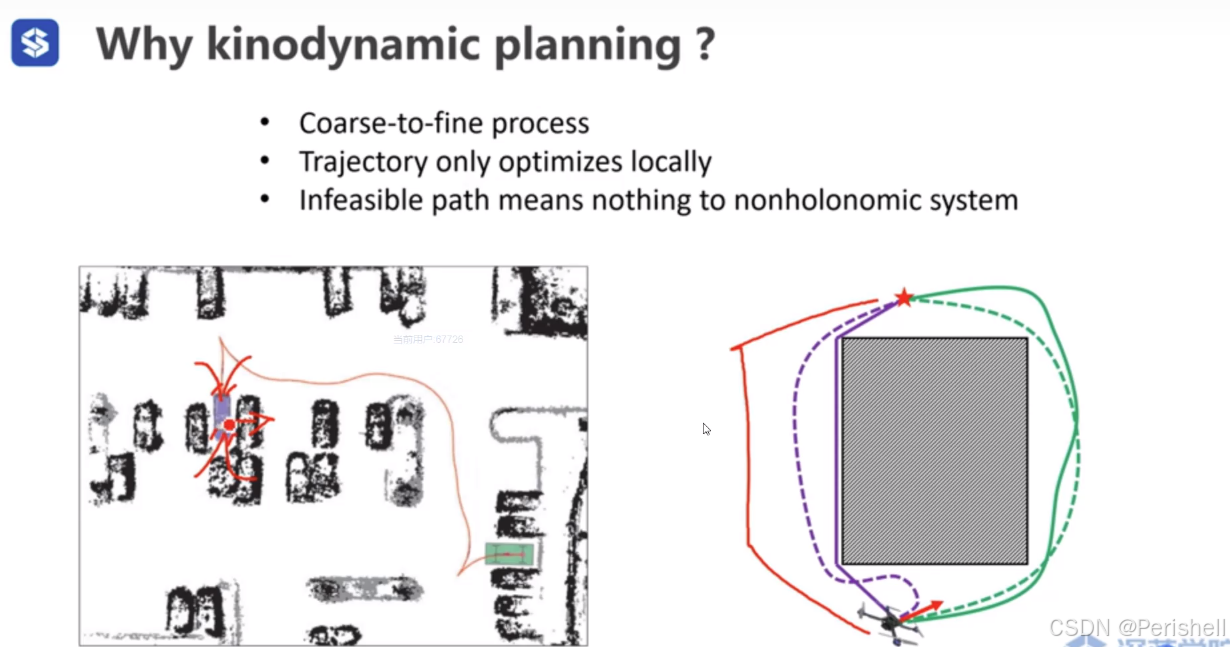
【注意】:仅仅只是维持一个小的局部地图,而不是时刻都维持一个较大的地图!!!
状态空间中的采样:
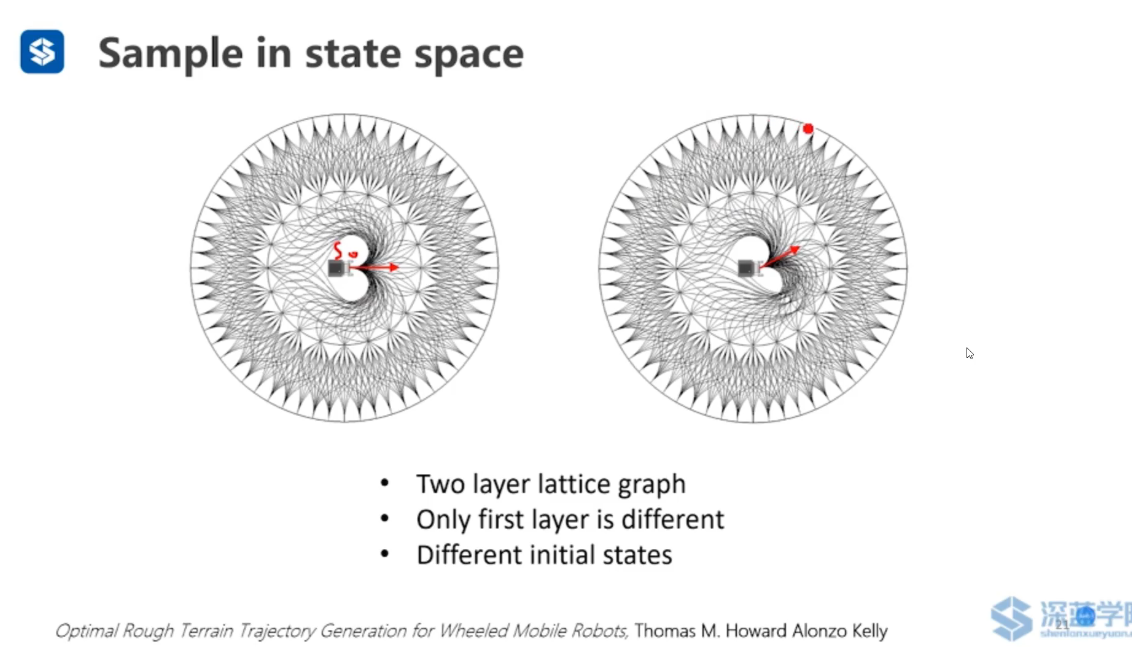
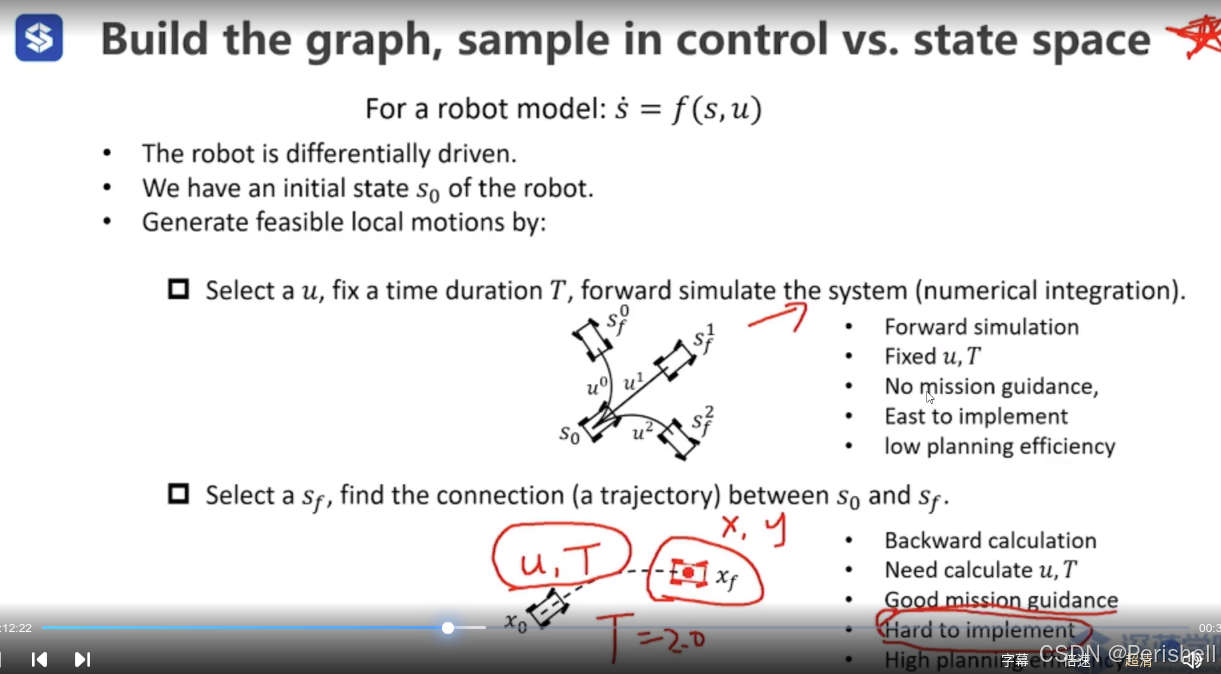
控制空间和状态空间的比较:
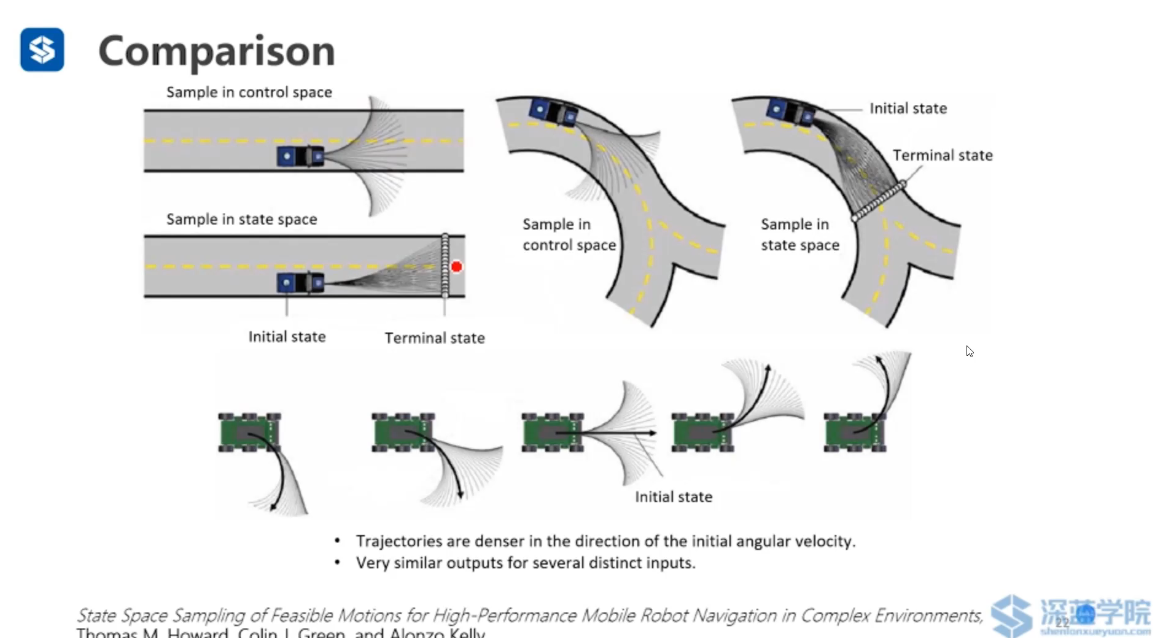
【注意】:控制空间中的规划曲线有很大可能是出来的轨迹有很大的可能性会有同质化的作用,很容易受到初始状态的影响较大!!!。
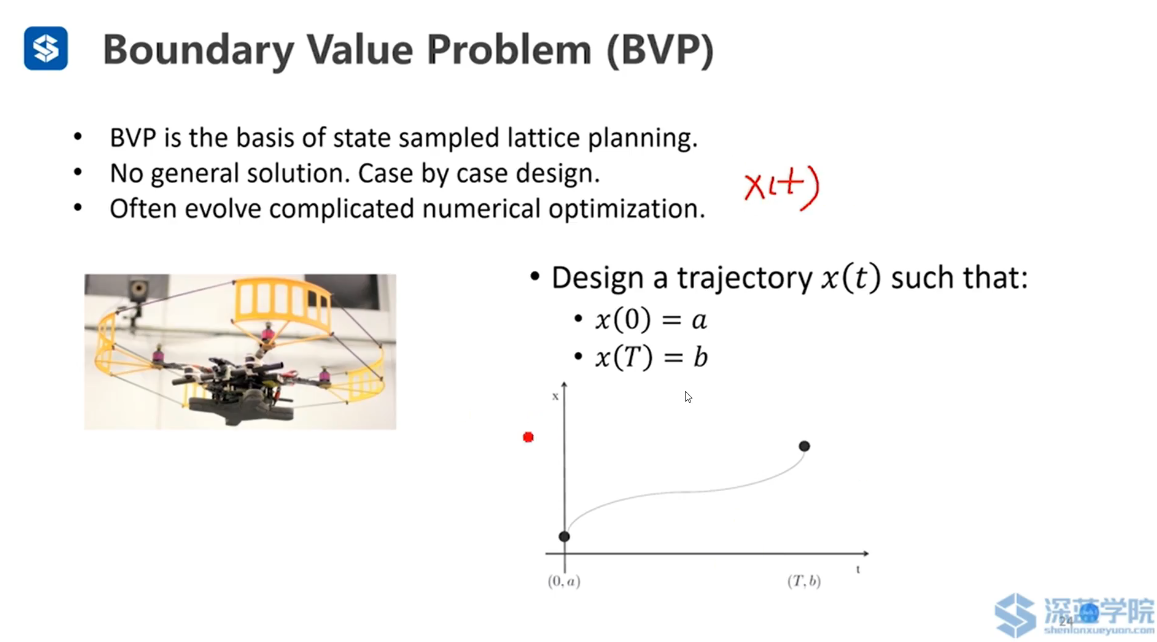
由于状态空间很难得到如何从初始状态到选定状态的方法,BVP就是其求解方法之一:
两点边界值最优控制问题:
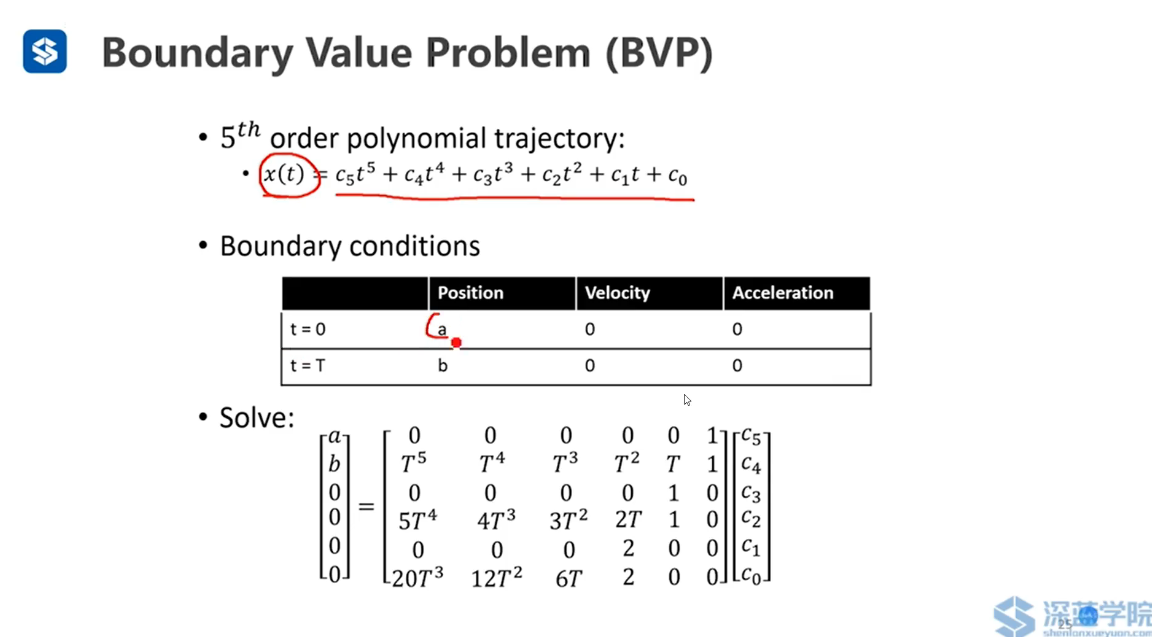
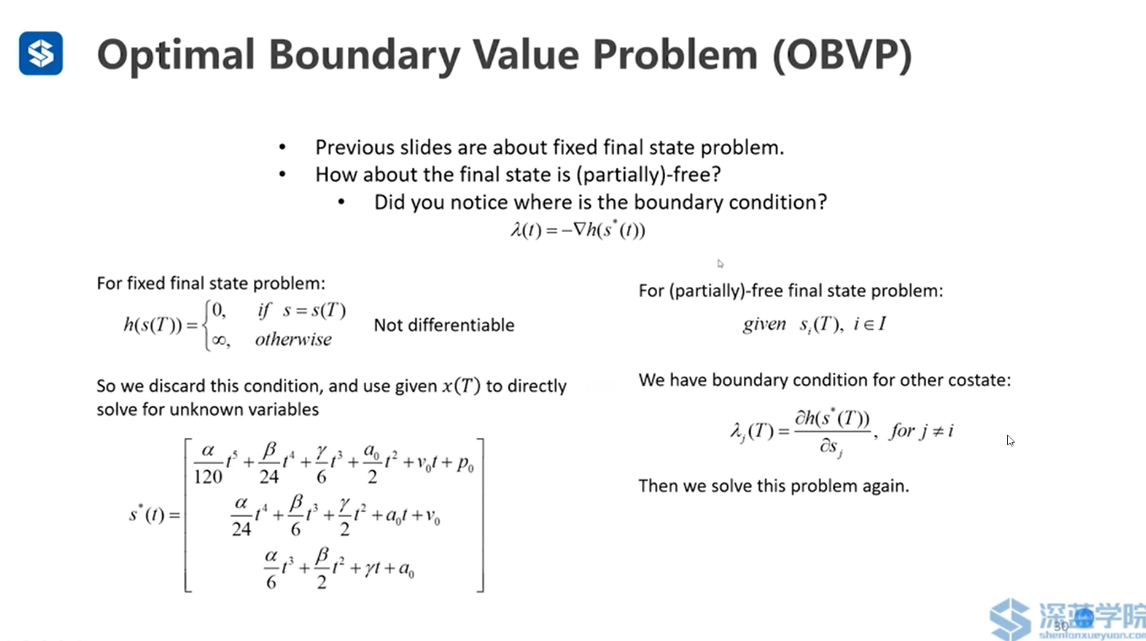
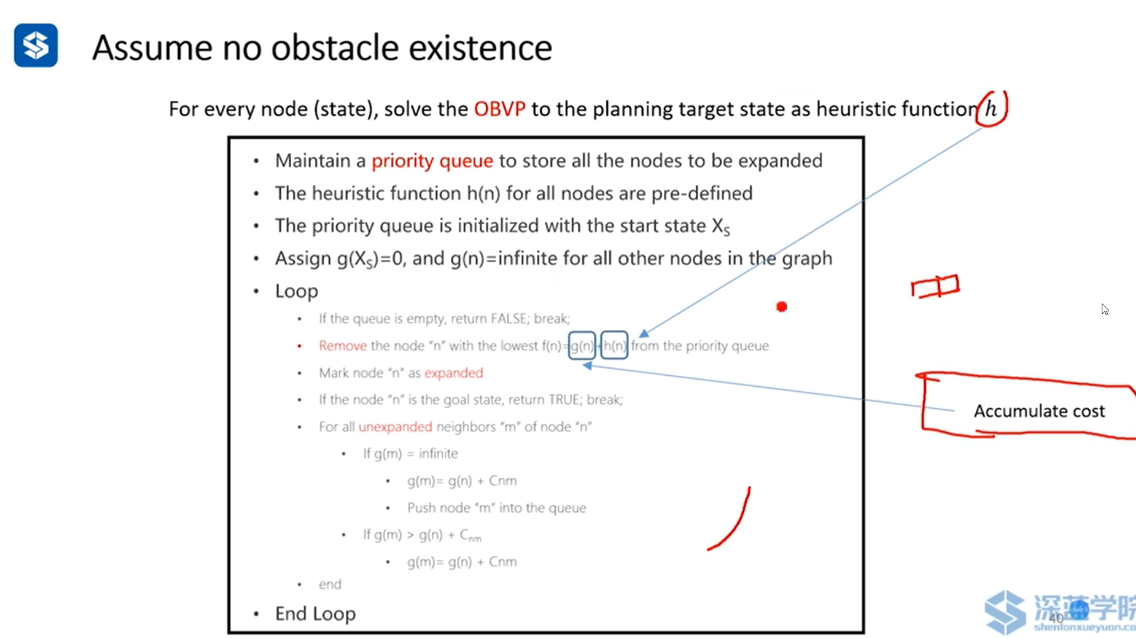
OBVP:
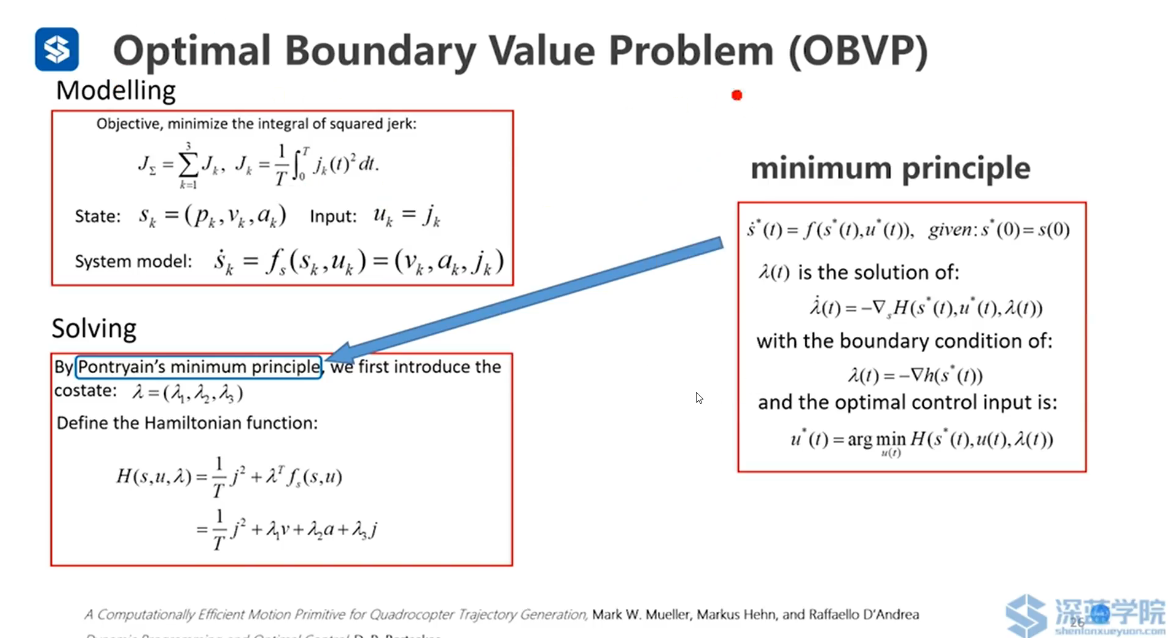
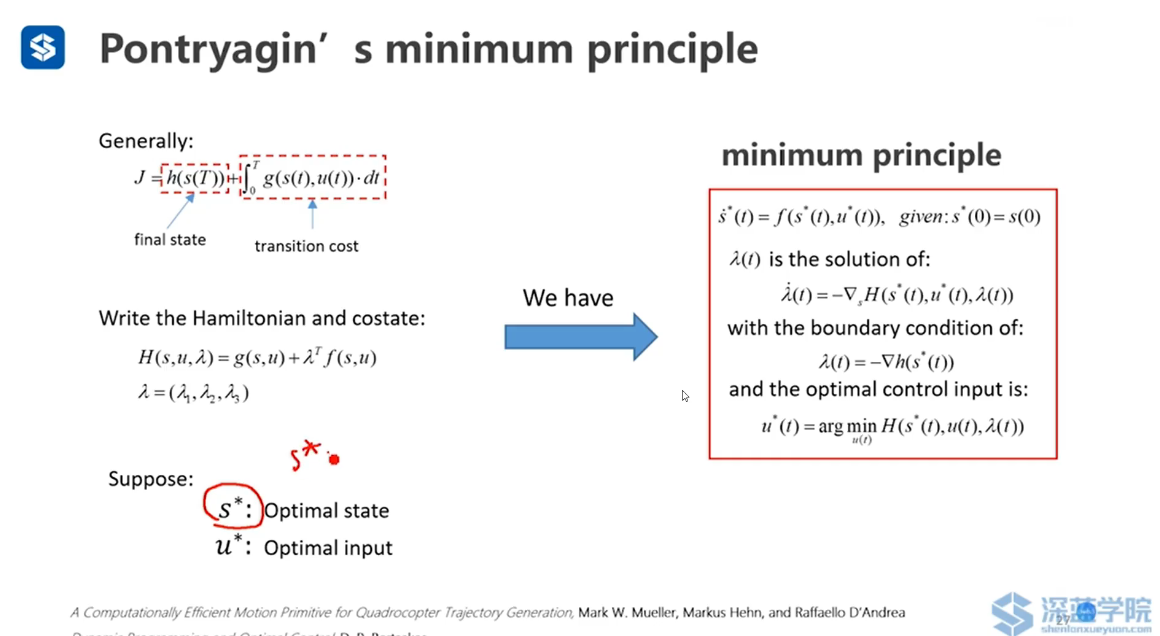
蒙特里亚金极小值原理:
示例求解:
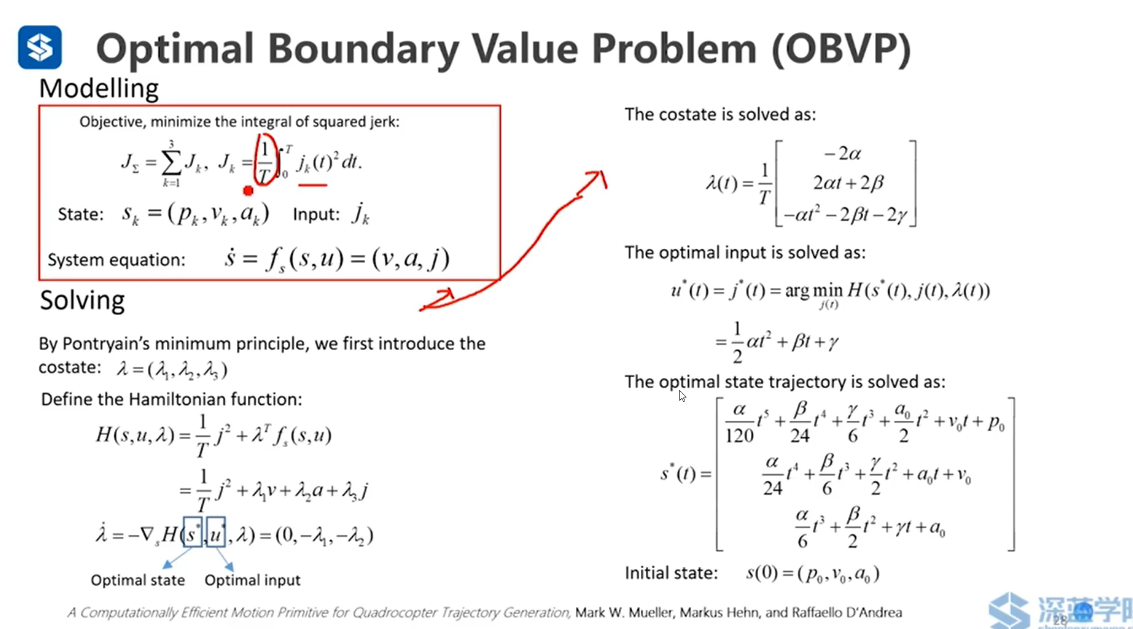
用末端状态进行求解:
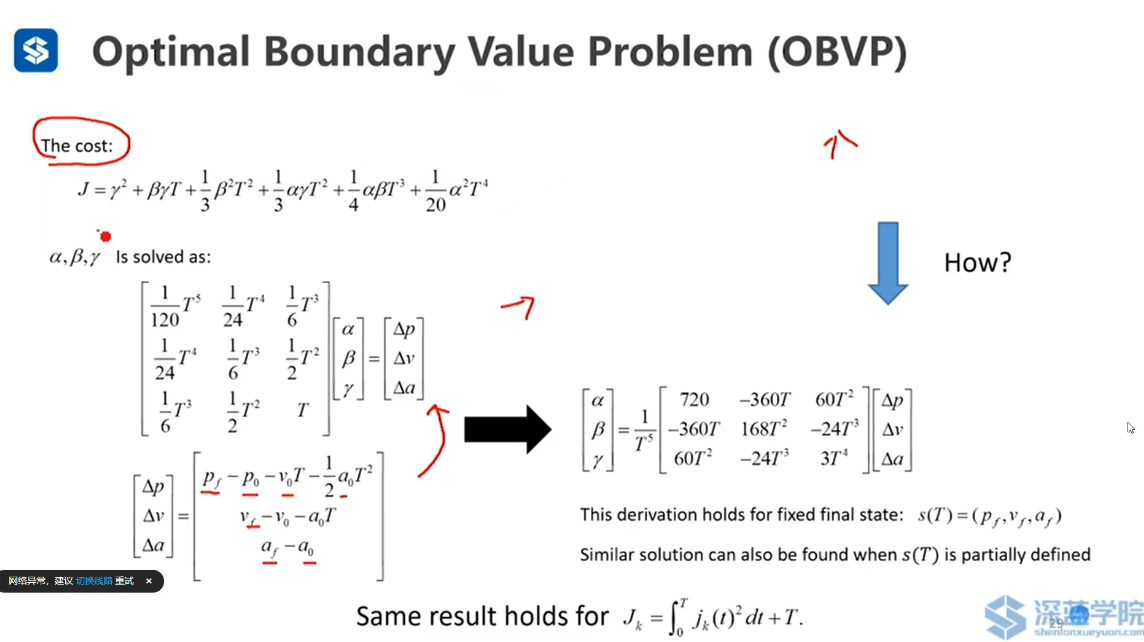
OBVP的边界问题:
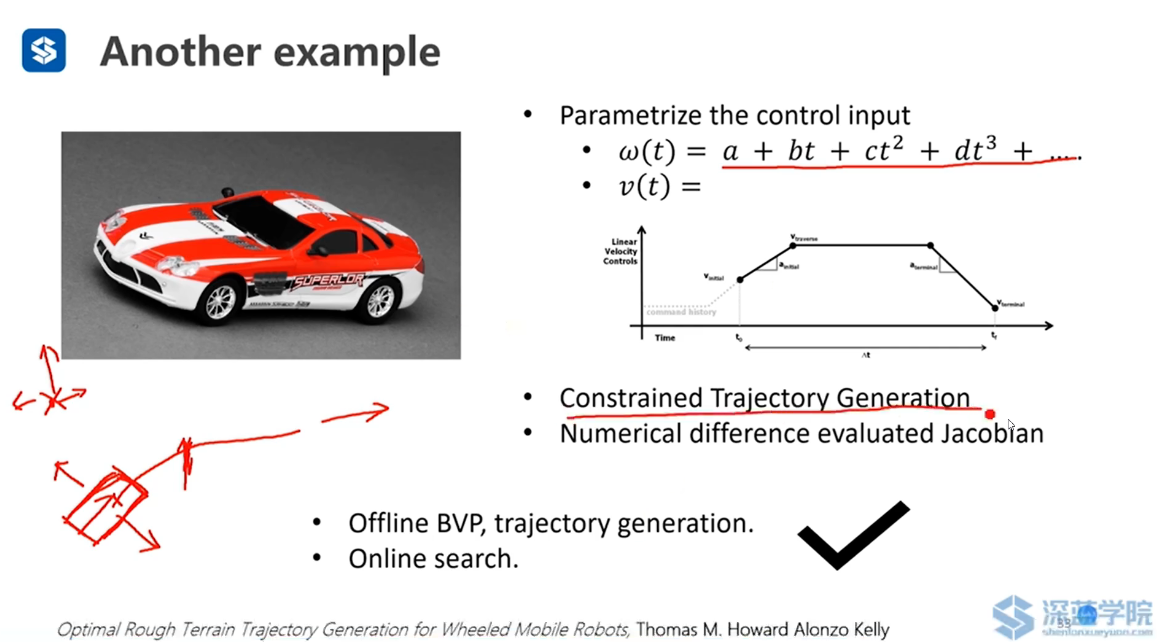
车是带有约束的BVP问题:
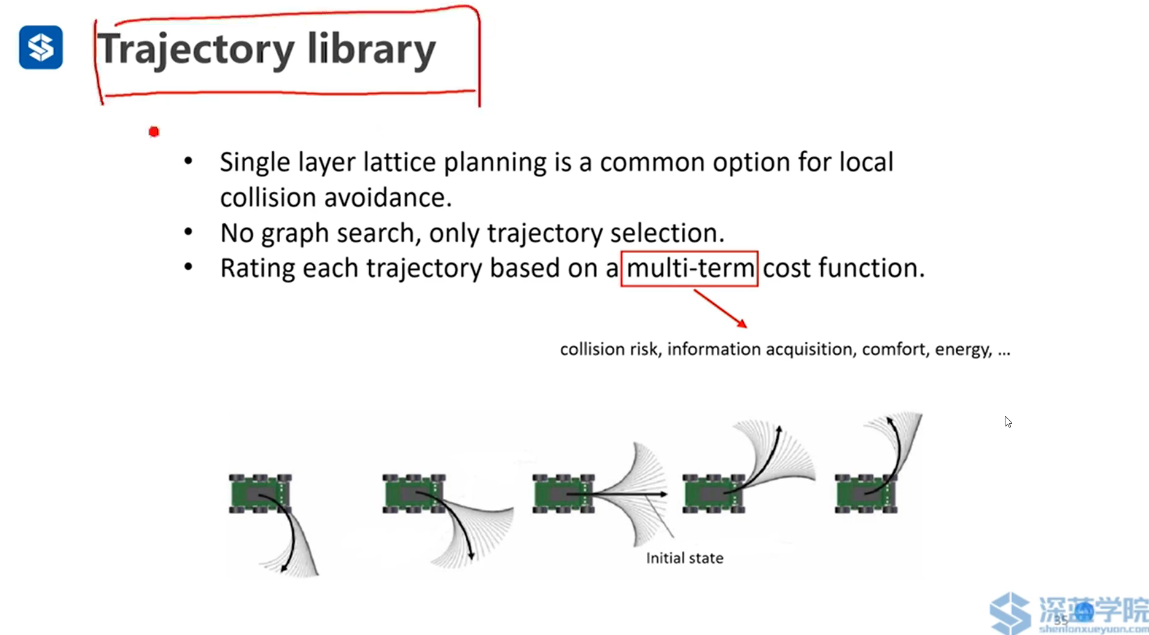
轨迹库:
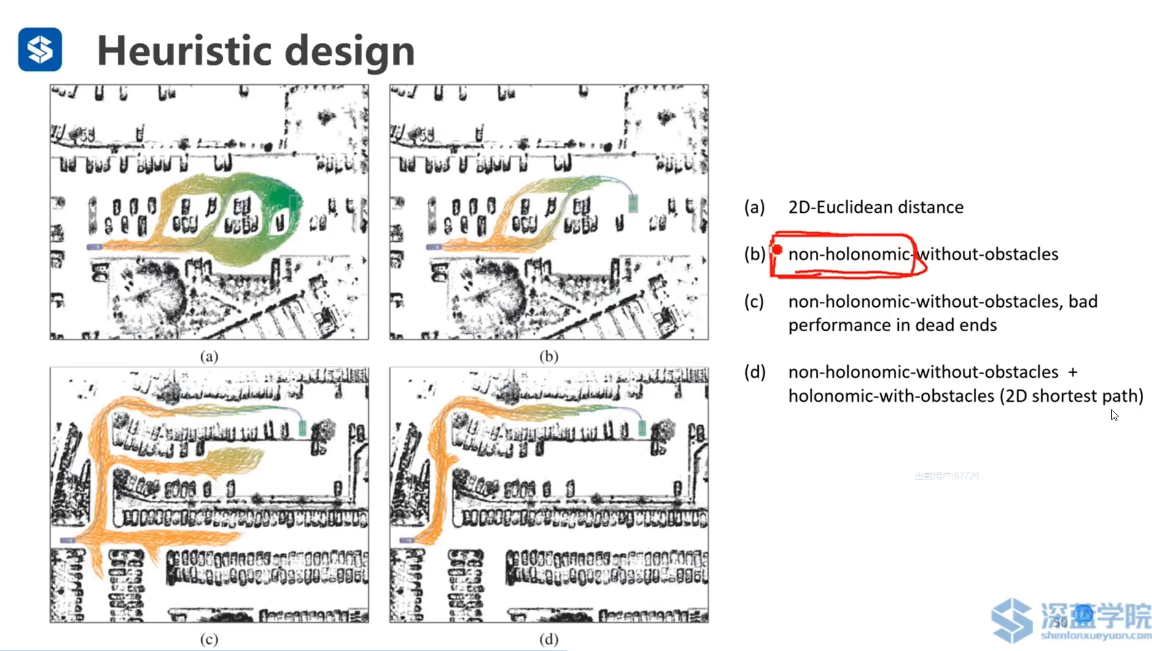
启发式设计:
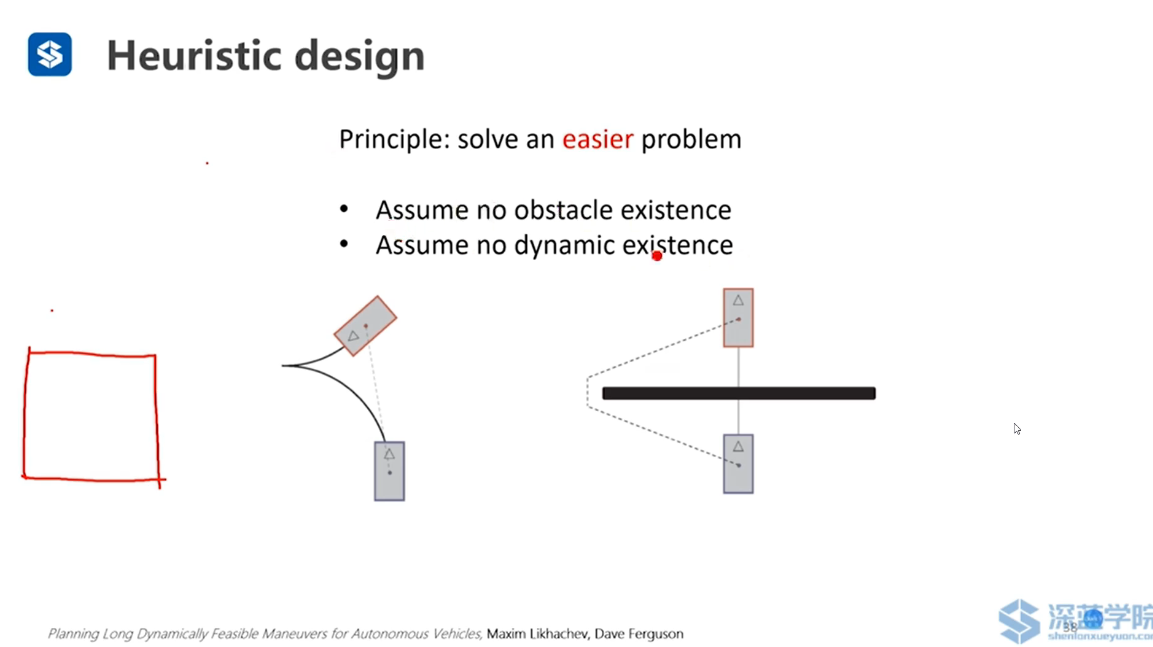
设计启发式函数:
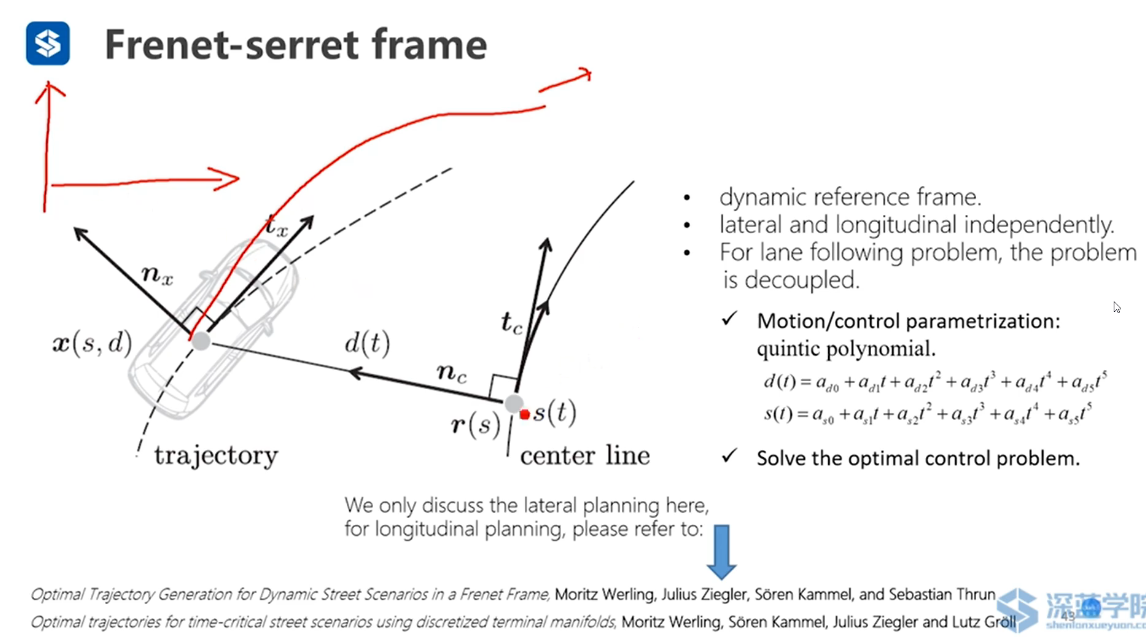
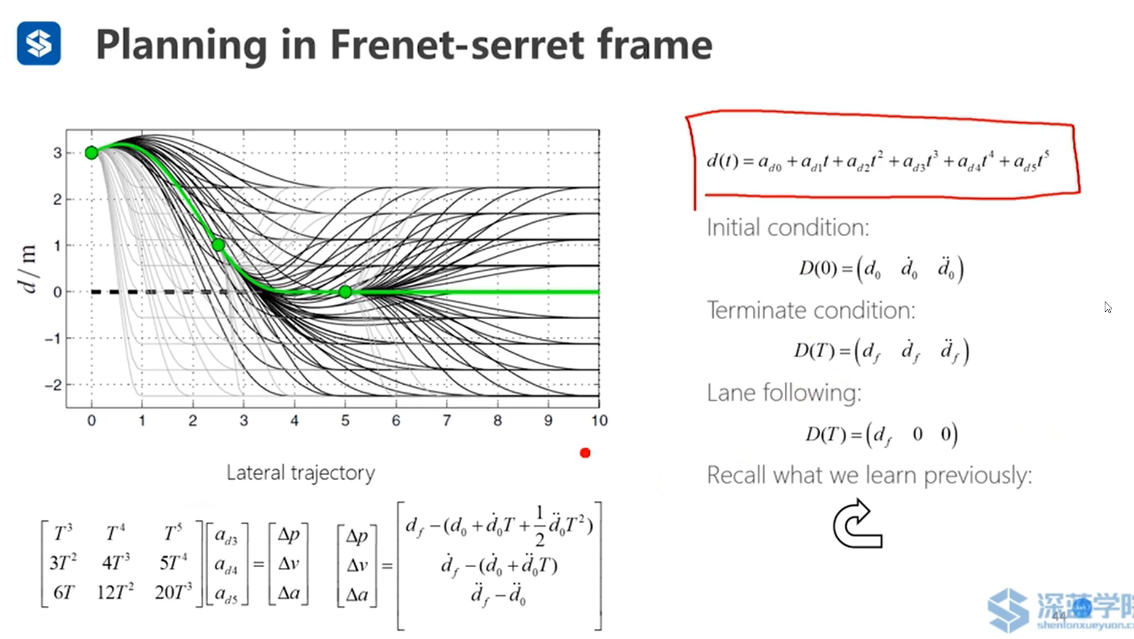
自动驾驶里面坐标系是根据车道线变化来的(又称为活动坐标系):
推荐算法库(主要用python):
https://github.com/AtsushiSakai/PythonRobotics
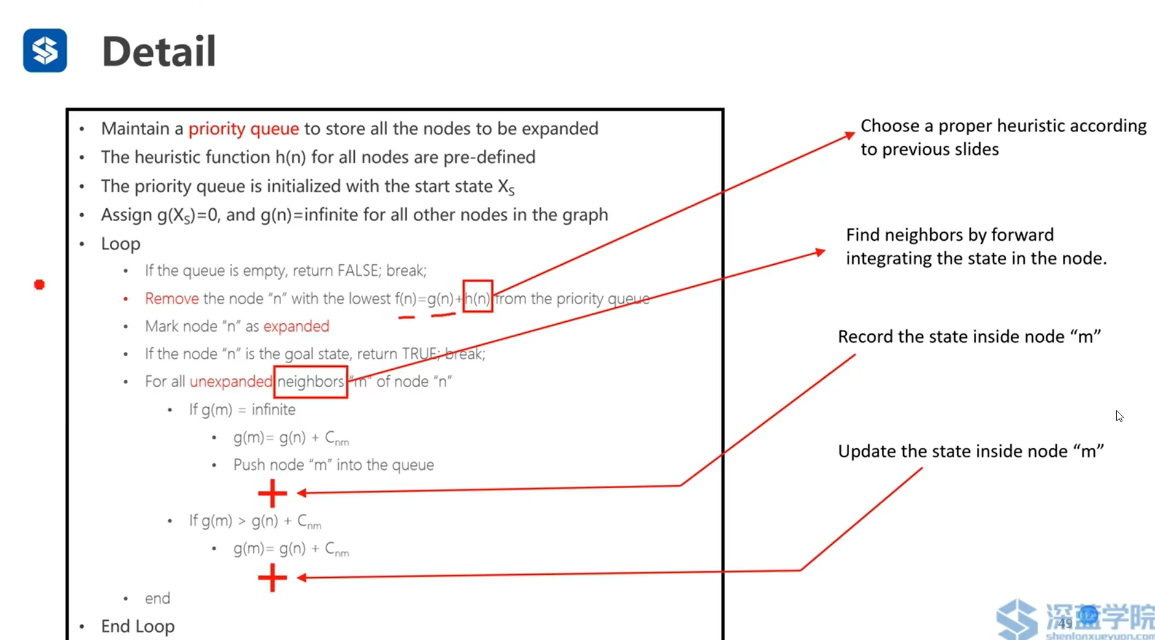
Hybrid A*算法:
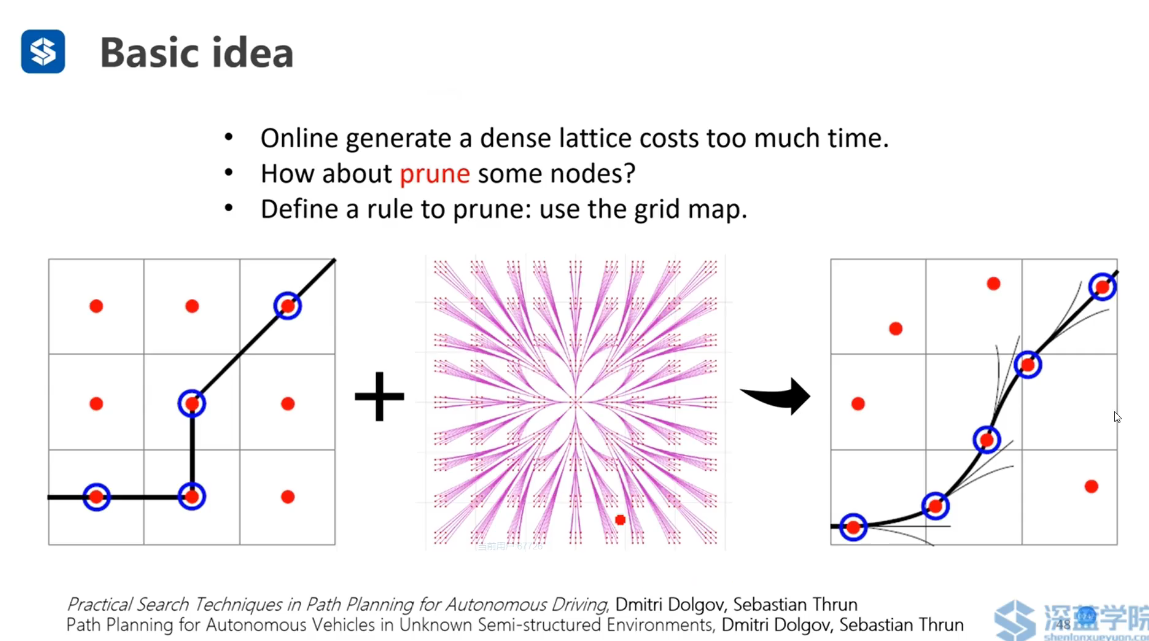
【注意】:永远保持只有一个点在一个栅格里面(如何判断取哪个点是通过看它的代价来的)
算法细节:
启发式的设计:
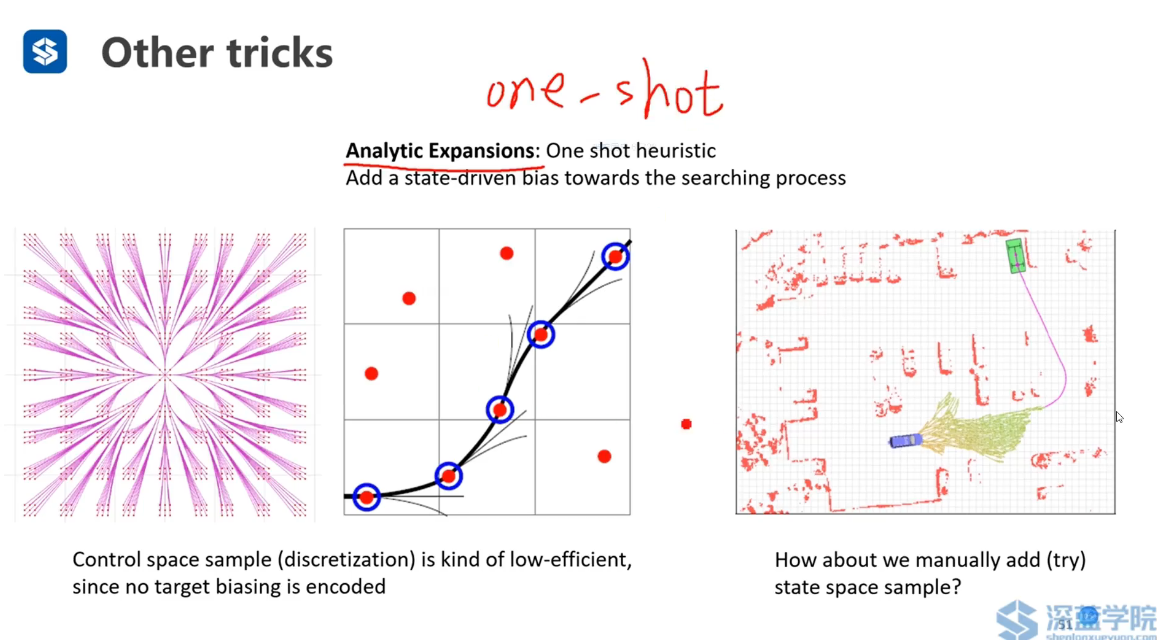
one-shot:
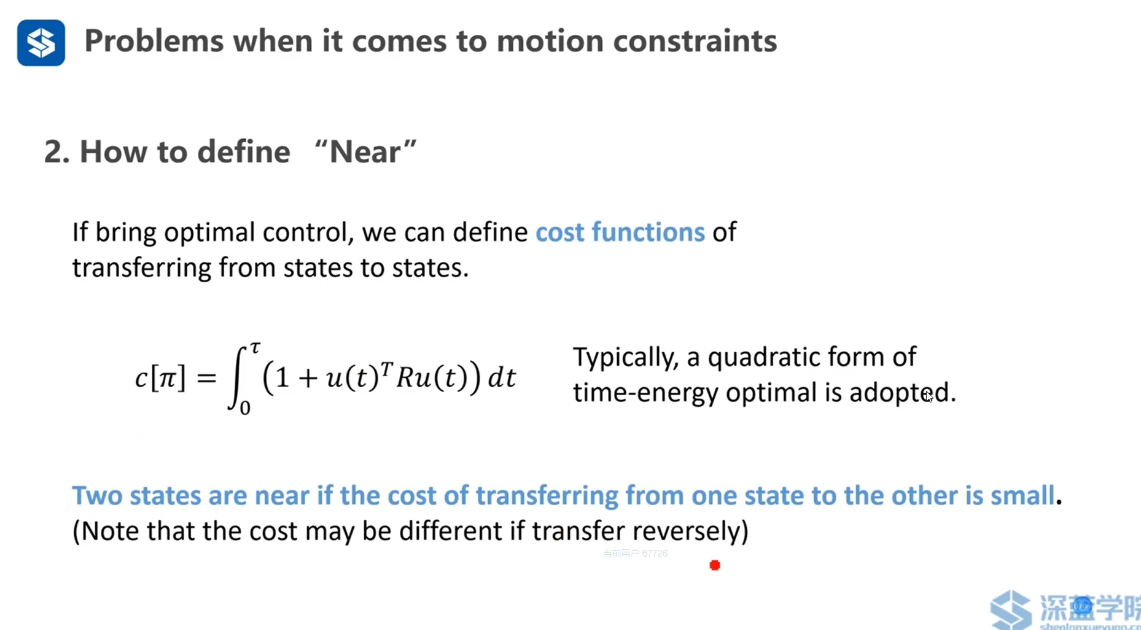
kinodynamic RRT*:
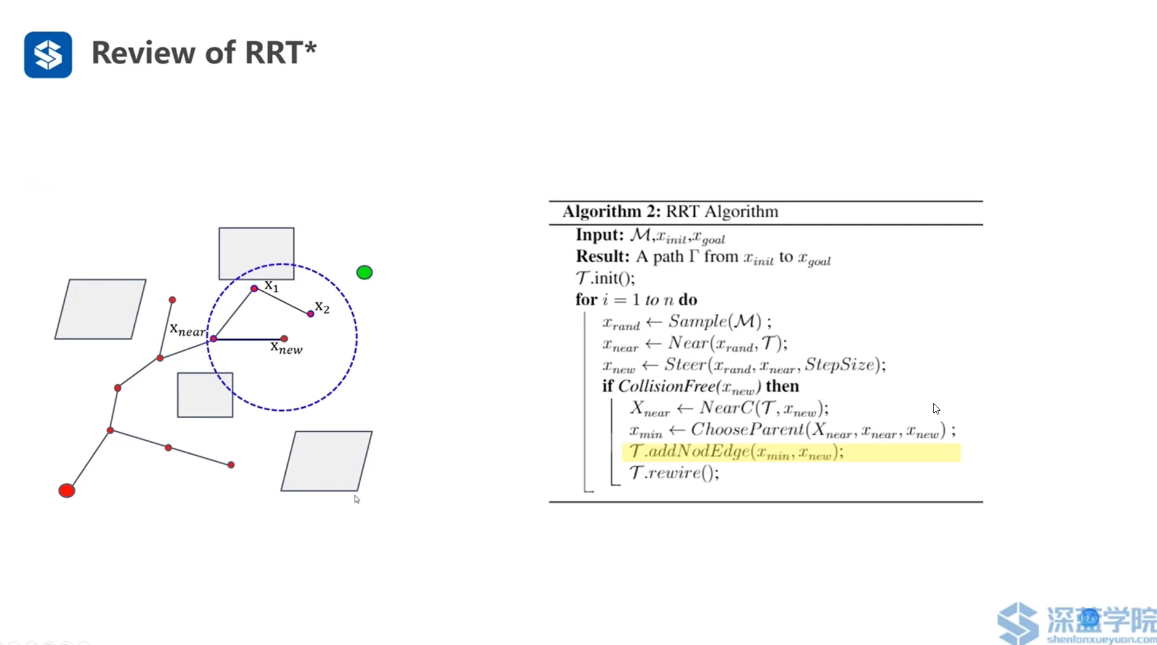 如何去采样:
如何去采样: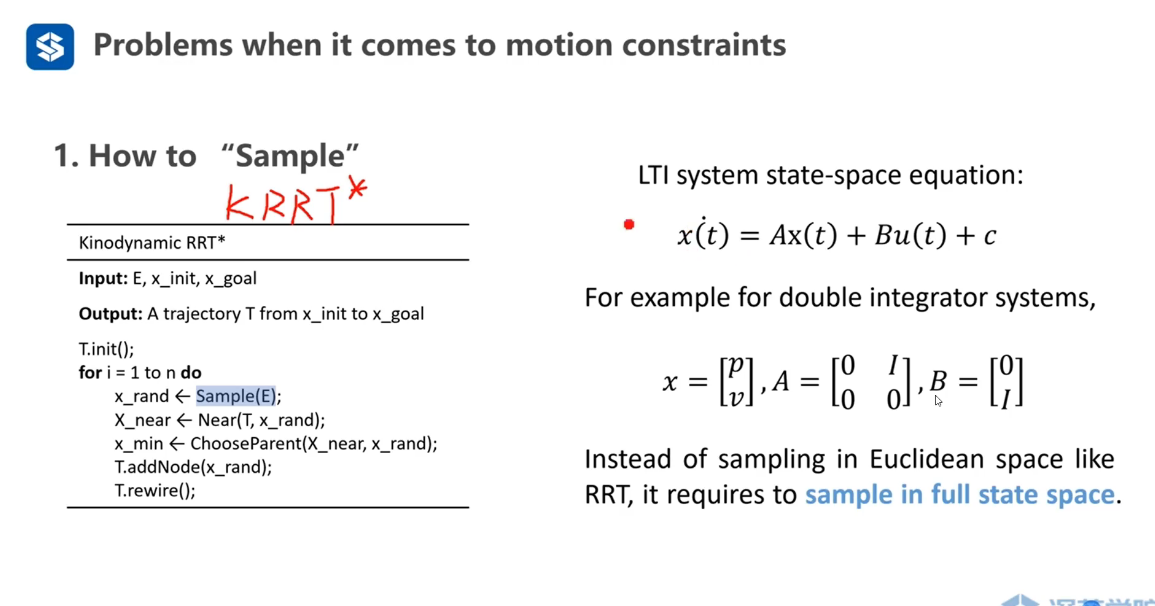

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 8
8 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)