【画图分析】rosbag结合rqt_bag和matlab分析数据
首先创建一个文件夹,cd该文件夹后,运行下面的指令记录数据记录完成后,为了定位数据,在rqt_bag中打开该文件。
·
一、rosbag指令
首先创建一个文件夹,cd该文件夹后,运行下面的指令记录数据
rosbag record -a参考链接:rosbag使用方法汇总_rosbag用法-CSDN博客
记录完成后,为了定位数据,在rqt_bag中打开该文件
二、rqt_bag分析数据
首先启动ros
roscore
rqt_bag
点击文件夹打开录制好bag文件

打开后的界面
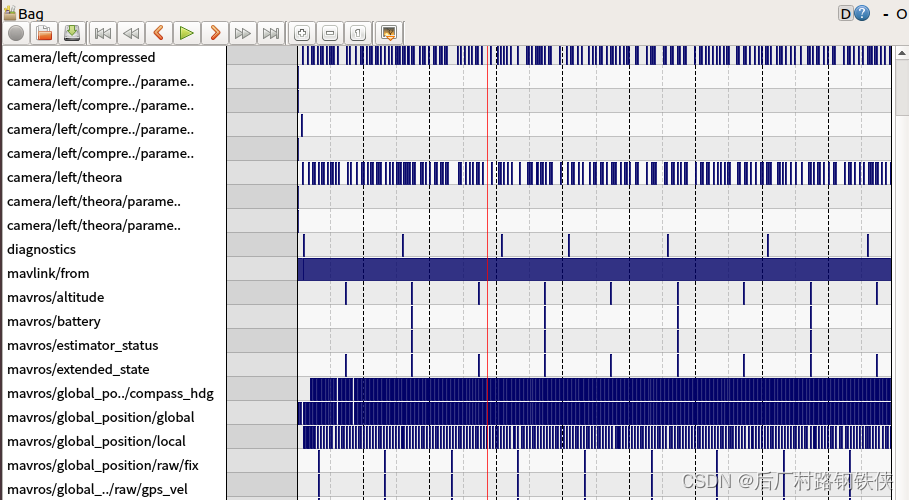
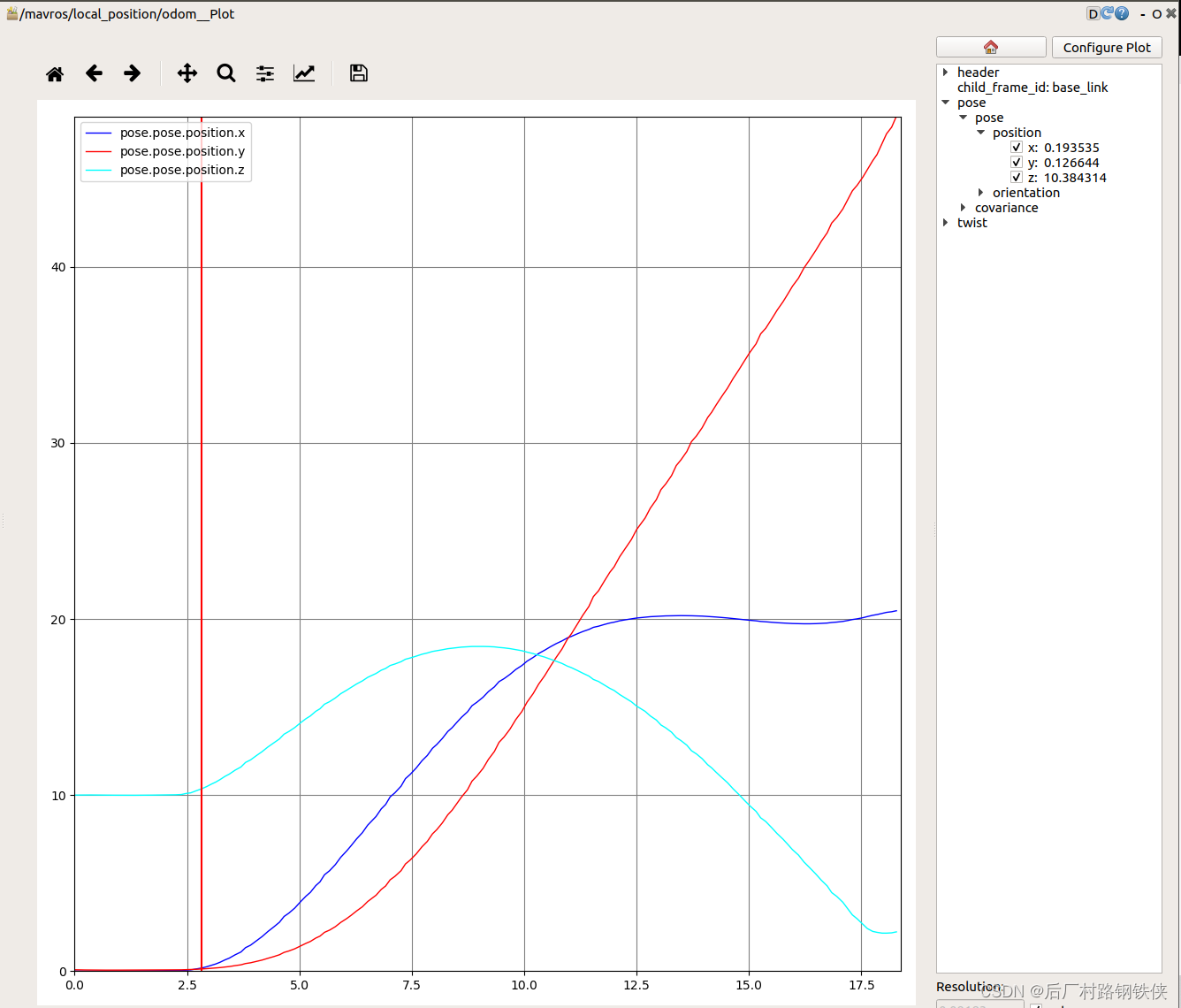
选择话题,右键-view-plot画图
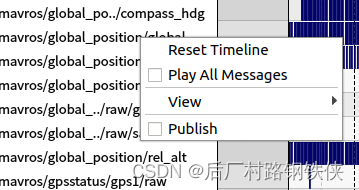
如图所示
 三、matlab分析
三、matlab分析
参考资料:rosbag数据画图MATLAB_matlab rosbag-CSDN博客
录入数据:
bag = rosbag('wugui.bag');获得具体的数值
sel = select(bag, 'Topic', '/turtle1/cmd_vel');
msgStructs = readMessages(sel,'DataFormat','struct');获得单个数据
vx1 = cellfun(@(m) double(m.Linear.X),msgStructs);
vy1 = cellfun(@(m) double(m.Linear.Y),msgStructs);
vz1 = cellfun(@(m) double(m.Linear.Z),msgStructs);画图
figure(1)
hold on;
plot(d01x,d01y,'Color','b','LineStyle','-','LineWidth',1);
grid on; 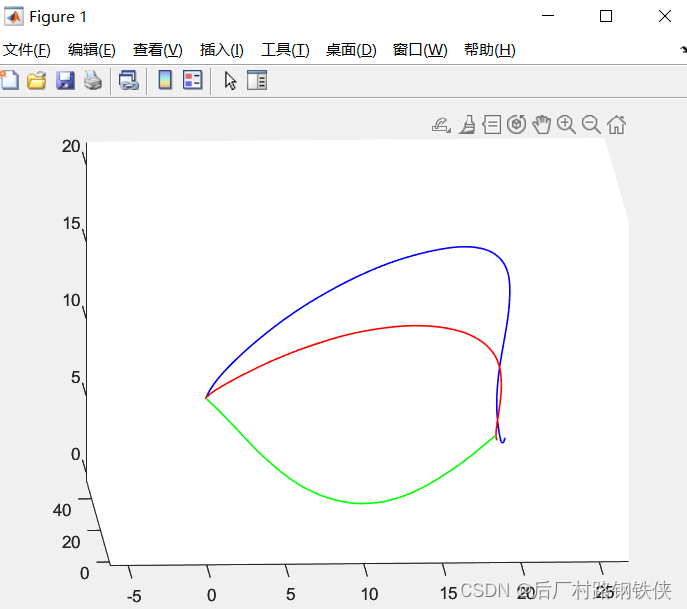

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 7
7 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)