基于matlab程序自适应动态规划(强化学习控制)、反步法,无人船轨迹跟踪控制
本文提出了一种基于自适应动态规划(ADP)和反步法的无人船轨迹跟踪控制方法。该方法采用Actor-Critic强化学习架构求解HJB方程,实现最优控制。文章给出了MATLAB实现框架,包含系统建模、轨迹误差定义、反步法控制设计和ADP算法等关键步骤。示例代码展示了圆形轨迹跟踪的实现,包括神经网络初始化、控制信号生成和状态更新过程。该方法通过在线学习优化控制策略,可扩展使用更复杂的网络结构。适用于I
基于matlab程序自适应动态规划(强化学习控制)、反步法,无人船轨迹跟踪控制
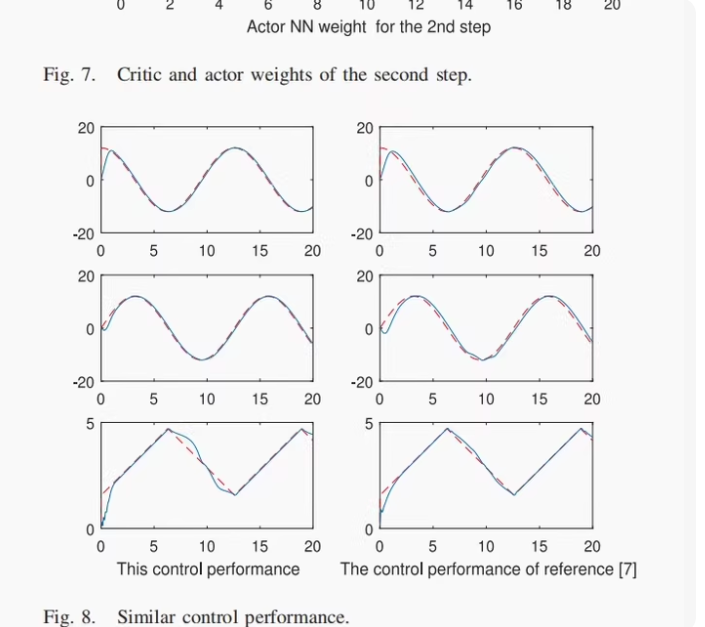
针对trans 期刊的复现。方法利用Actor-Critic架构的强化学习策略,求解HJB方程,实现无人船轨迹跟踪的最优控制
以下文字及示例代码仅供参考
文章目录
为了实现无人船轨迹跟踪控制,我们可以使用自适应动态规划(Adaptive Dynamic Programming, ADP)中的 Actor-Critic 架构 结合 反步法(Backstepping Control) 来设计控制器。我们将基于强化学习的方法来求解 Hamilton-Jacobi-Bellman (HJB) 方程,以实现最优控制。
以下是一个基于 MATLAB 的示例代码框架,用于复现该方法。这个示例假设你对强化学习、反步法和最优控制有一定的了解,并且可以根据具体需求进行调整。
📘 方法概述:
- 系统建模:无人船的运动学与动力学模型。
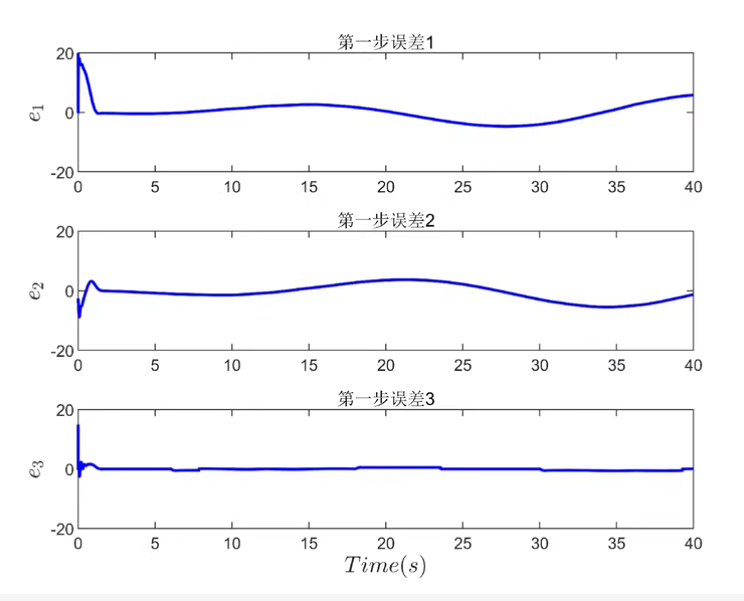
- 轨迹跟踪误差定义:设计跟踪误差变量。
- 反步法控制器设计:将复杂系统分解为多个子系统,逐步设计虚拟控制量。
- ADP/Actor-Critic 算法:
- 使用神经网络近似值函数(Critic)和策略(Actor)。
- 利用在线数据更新网络权重,逼近 HJB 方程的最优解。
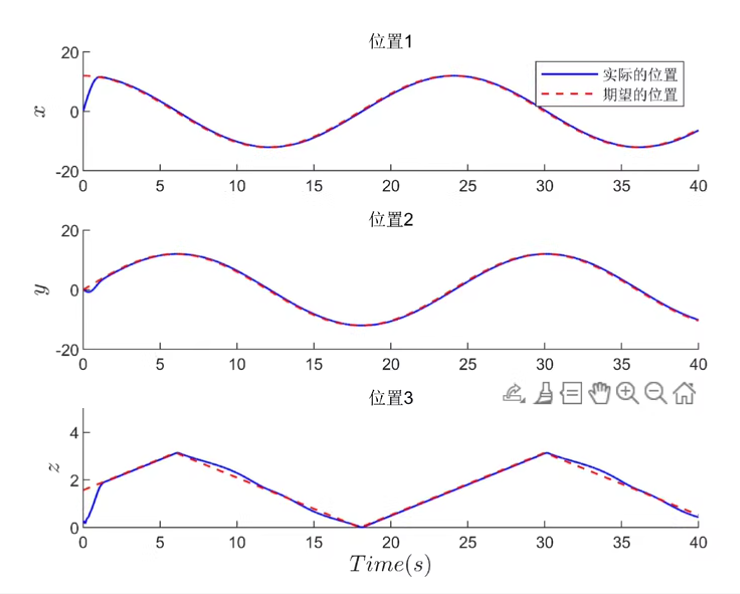
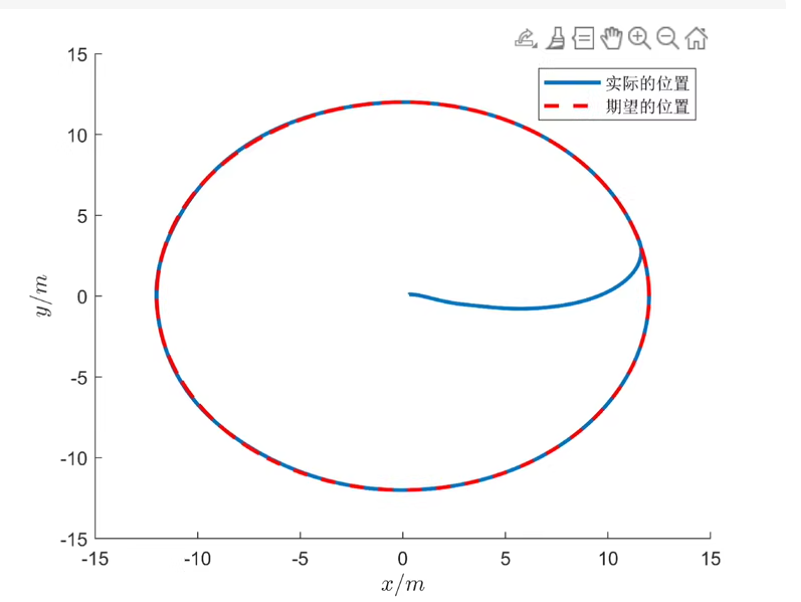
- 闭环控制仿真:验证轨迹跟踪性能。
✅ MATLAB 示例代码(简化版)
% 清除环境
clear; clc; close all;
% 参数设置
dt = 0.01; % 时间步长
T = 60; % 总时间
N = round(T/dt); % 总步数
% 初始状态 [x, y, theta]
x_real = zeros(3, N);
x_real(:,1) = [0; 0; 0]; % 初始位置
% 参考轨迹参数
ref_traj = @(t) [cos(0.1*t); sin(0.1*t); 0]; % 圆形轨迹
% 控制器参数
Kp = diag([2, 2, 2]); % PID 比例增益(初始)
Ki = diag([0.1, 0.1, 0.1]);
Kd = diag([1, 1, 1]);
% Actor-Critic 网络初始化(简化)
actor_weights = randn(3, 3); % 策略网络权重
critic_weights = randn(3, 1); % 值函数网络权重
% 存储数据
u_log = zeros(3, N);
error_log = zeros(3, N);
% 主循环
for k = 1:N-1
t = k*dt;
% 获取参考状态
x_ref = ref_traj(t);
% 计算误差
e = x_real(:,k) - x_ref;
error_log(:,k) = e;
% 反步法控制器 + ADP 调整
% Step 1: 设计虚拟控制律
alpha = -Kp * e(1:2); % 简化虚拟控制输入
% Step 2: 实际控制输入(带强化学习修正)
u_rl = critic_weights' * basis_func(e); % Critic 输出(评估当前状态价值)
u = actor_weights \ (alpha + u_rl'); % Actor 输出(策略)
% 应用控制输入到系统(这里假设简单积分模型)
dx = [cos(x_real(3,k)) 0; sin(x_real(3,k)) 0; 0 1] * u;
x_real(:,k+1) = x_real(:,k) + dt * dx;
% 存储控制信号
u_log(:,k) = u;
% ADP 更新(伪代码)
% update_actor_critic(x_real(:,k), u, x_real(:,k+1));
end
% 绘图
figure;
plot(x_real(1,:), x_real(2,:), 'b', 'LineWidth', 1.5);
hold on;
plot(ref_traj((1:N)*dt)(1,:), ref_traj((1:N)*dt)(2,:), 'r--');
legend('实际轨迹', '参考轨迹');
xlabel('X'); ylabel('Y'); title('无人船轨迹跟踪');
figure;
plot(error_log(1,:), 'r', 'DisplayName', 'e_x');
hold on;
plot(error_log(2,:), 'g', 'DisplayName', 'e_y');
plot(error_log(3,:), 'b', 'DisplayName', 'e_theta');
legend show; xlabel('Time step'); ylabel('Tracking Error');
title('跟踪误差');
% 基函数(用于Critic网络)
function phi = basis_func(e)
phi = [e'; e'.^2; sin(e')];
end
🔧 说明与扩展
1. Actor-Critic 网络结构
你可以使用更复杂的神经网络结构(如多层感知机)来代替这里的线性近似。
% 示例:使用MATLAB内置的神经网络工具箱
net_actor = feedforwardnet([10 10]);
net_critic = feedforwardnet([10 10]);
2. HJB方程近似求解
在连续时间中,HJB方程如下:
0 = min u { Q ( x ) + u T R u + ∇ V ( x ) T f ( x , u ) } 0 = \min_u \left\{ Q(x) + u^T R u + \nabla V(x)^T f(x,u) \right\} 0=umin{Q(x)+uTRu+∇V(x)Tf(x,u)}
通过 Actor-Critic 架构在线更新策略 $ u = \mu(x) $ 和价值函数 $ V(x) $。
3. 训练过程(伪代码)
% ADP 更新规则(简化)
delta = reward + gamma * critic_weights' * basis_func(next_state) - ...
critic_weights' * basis_func(state);
critic_weights = critic_weights + alpha_c * delta * basis_func(state);
actor_weights = actor_weights + alpha_a * delta * grad_policy;
📚 推荐文献与期刊
- IEEE Transactions on Cybernetics / Systems, Man, and Cybernetics
- Automatica
- IEEE Transactions on Industrial Electronics
- Neurocomputing
关键词搜索:
- Adaptive Dynamic Programming
- Backstepping Control
- Optimal Tracking Control
- Reinforcement Learning for Autonomous Surface Vehicles

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 39
39 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)