深蓝路径规划作业-第一章
4.打开rviz,在执行rviz之前需要roscore打开ros,之后打开新的窗口,首先要保存工作路径source devel/setup.bash,然后执行rviz。1.首先根据要求创建workspace,复制第一章文件夹src到工作空间文件夹catkin_ws下。3.编译当前文件夹,需要先进入catkin_ws下:cd .. 然后编译:catkin_make。2.在当前src文件夹下初始化工作
·
1.首先根据要求创建workspace,复制第一章文件夹src到工作空间文件夹catkin_ws下
2.在当前src文件夹下初始化工作空间:catkin_inite_workspace
3.编译当前文件夹,需要先进入catkin_ws下:cd .. 然后编译:catkin_make
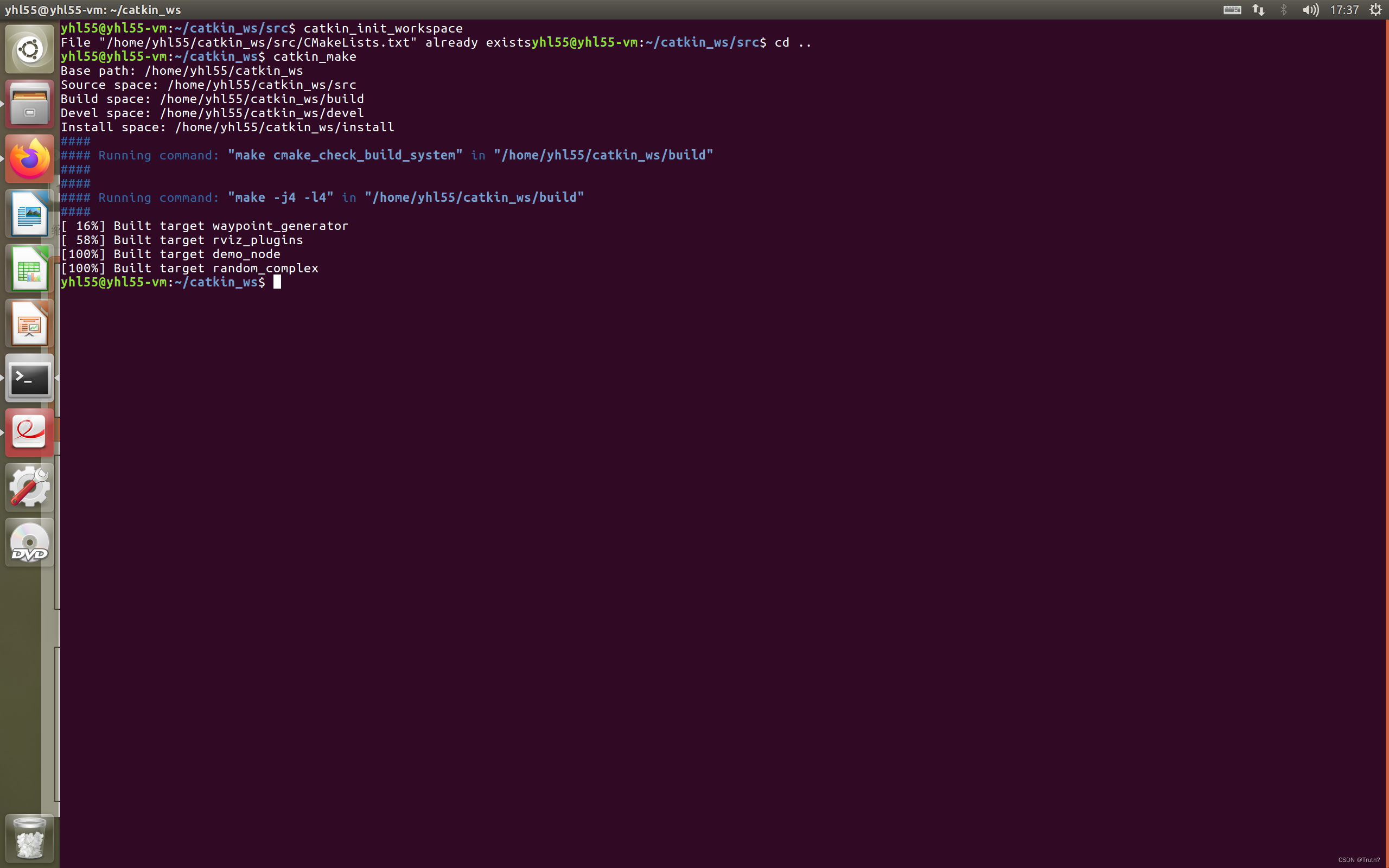
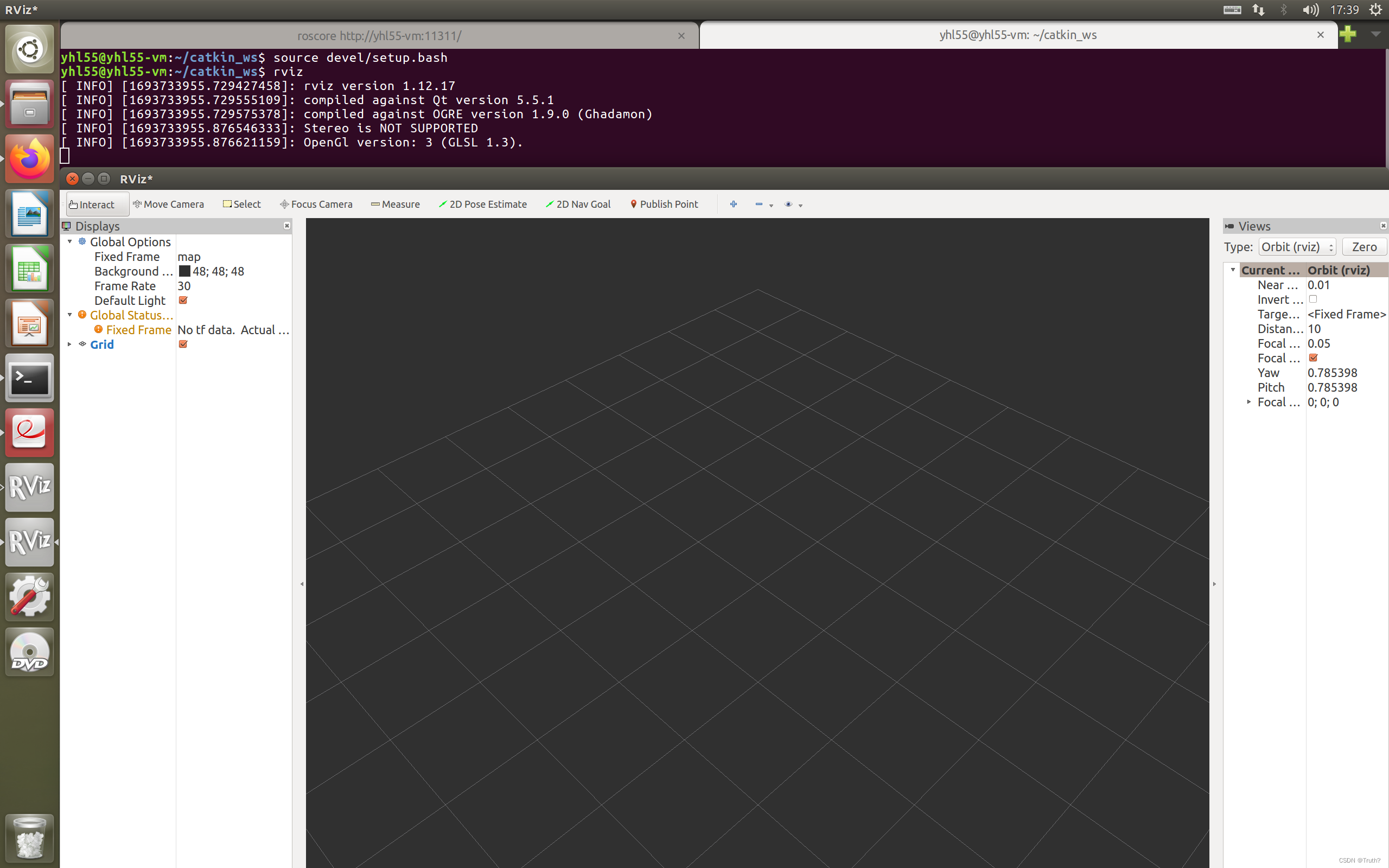
4.打开rviz,在执行rviz之前需要roscore打开ros,之后打开新的窗口,首先要保存工作路径source devel/setup.bash,然后执行rviz。
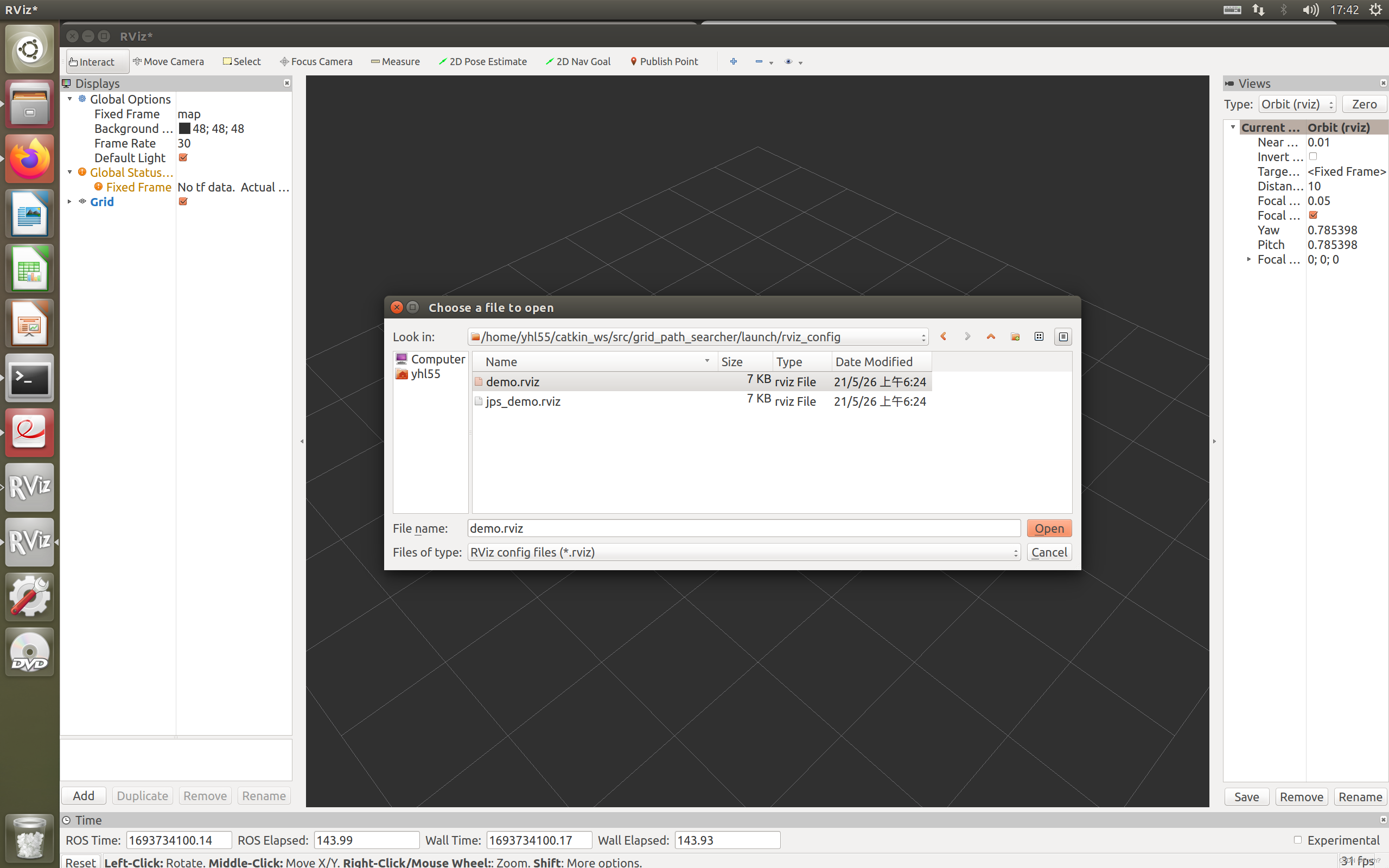
5.打开地图,在左上角open文件,然后在如下地址打开地图:
打开地图后的rviz如下:
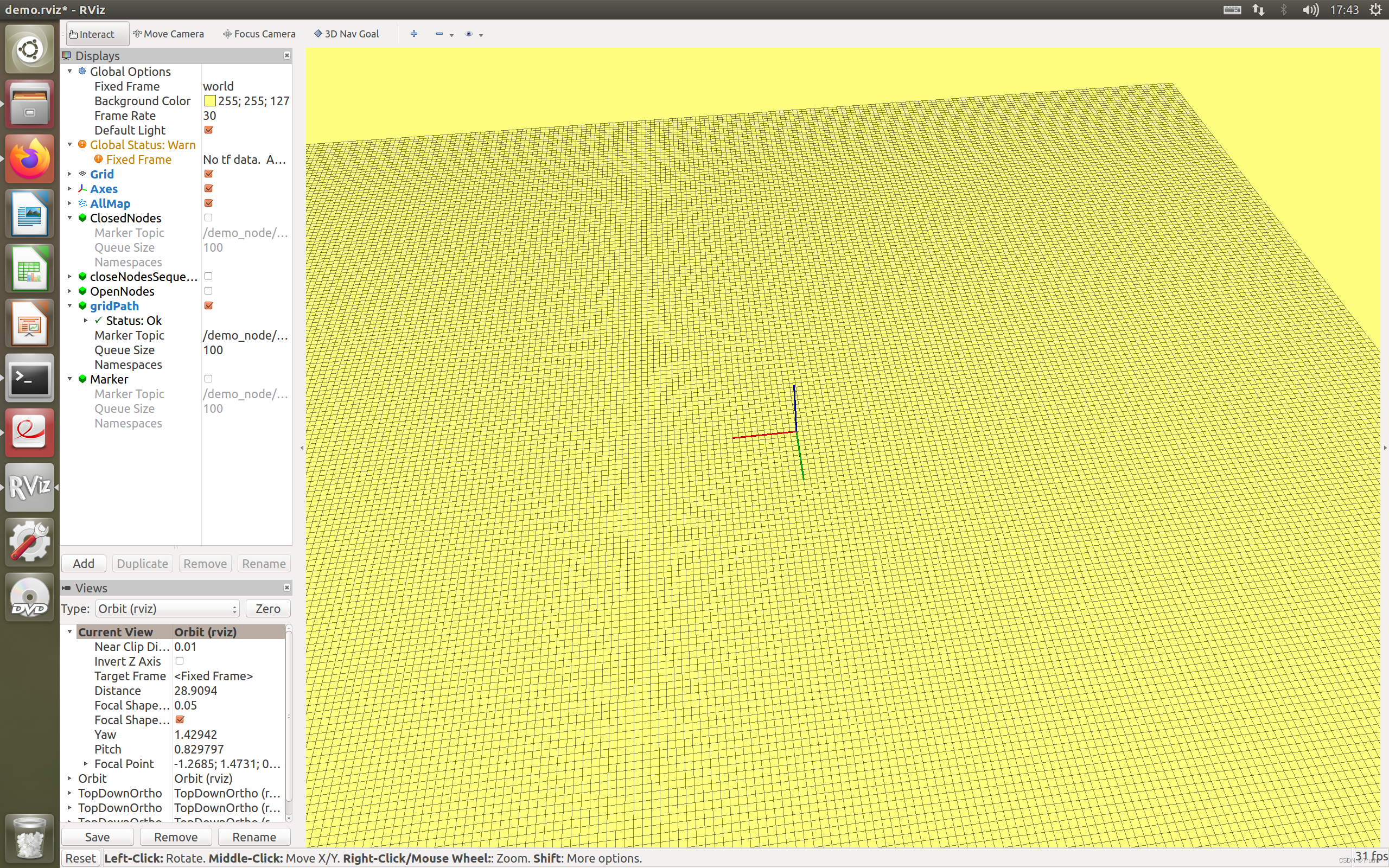
6.载入地图,执行一下命令
source devel/setup.bash
roslaunch grid_path_searcher demo.launch
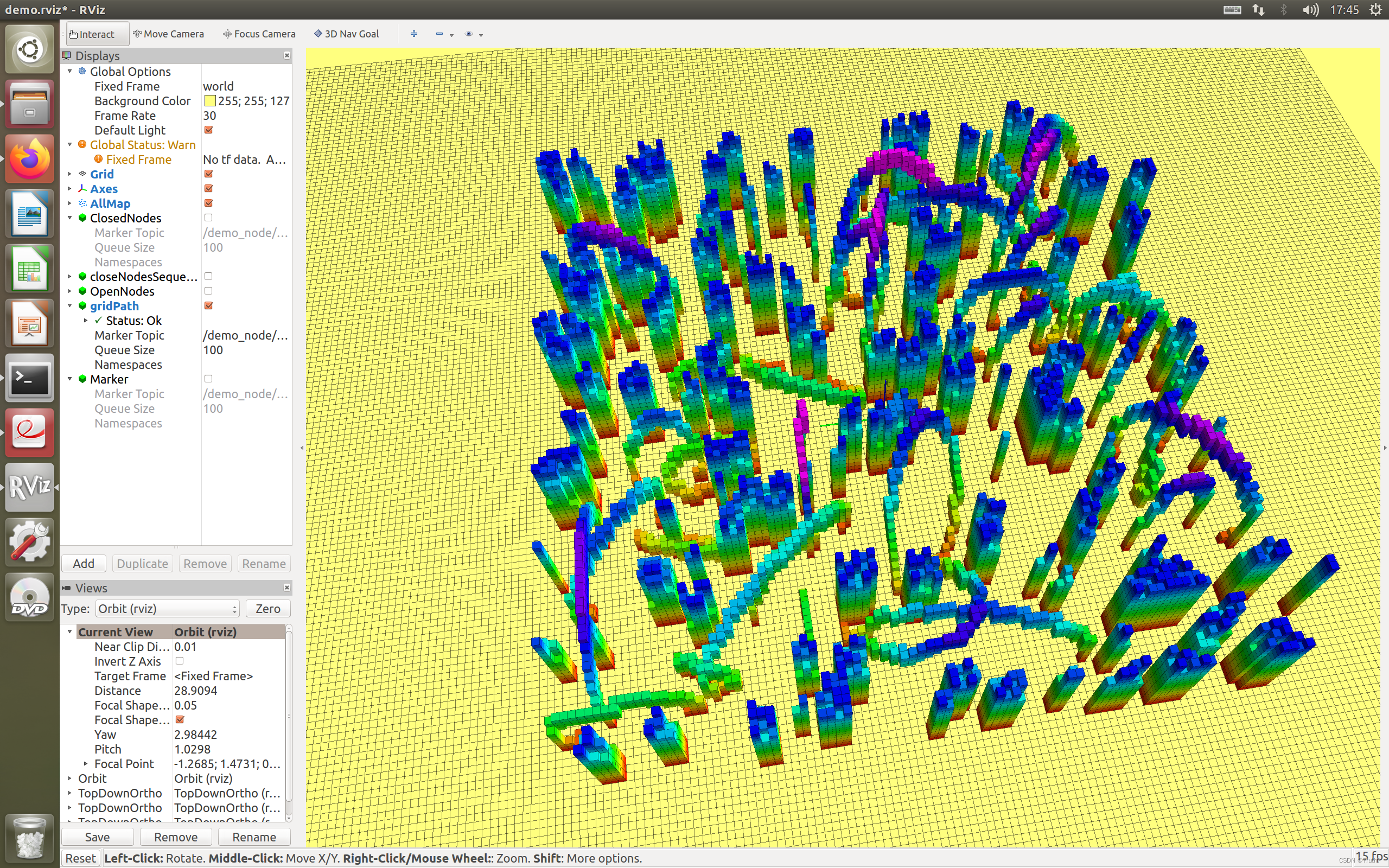
完成,可以使用快捷键G选择目标点。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 1
1 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)