深蓝学院第三章路径规划——基于采样的路径规划算法与进阶
简要介绍RRT*算法及其相关的变体算法以及OMPL库
·
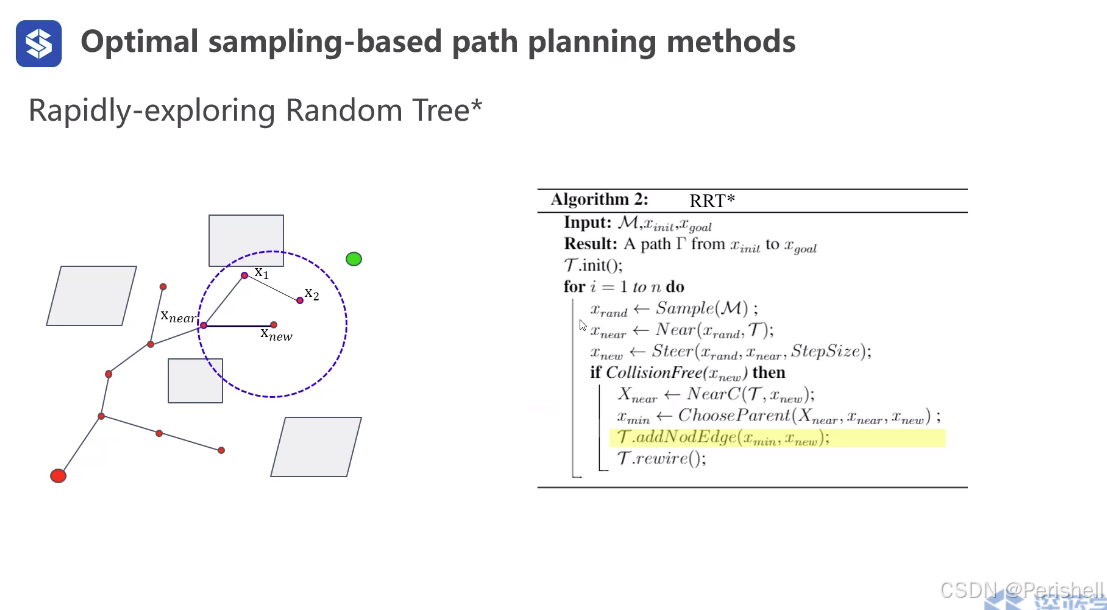
RRT*
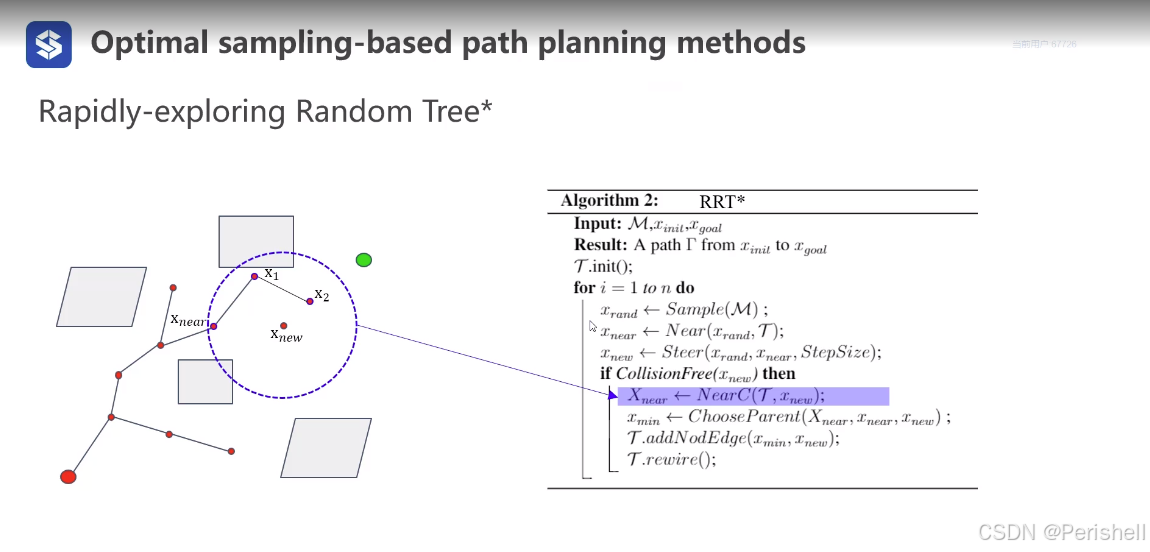
[注意]:通过计算x_near、x_1、x_2连接x_new的父系节点代价,这里考虑的是距离最小。因此连接x_near和x_new。
[注意]:rewire剪脂操作。
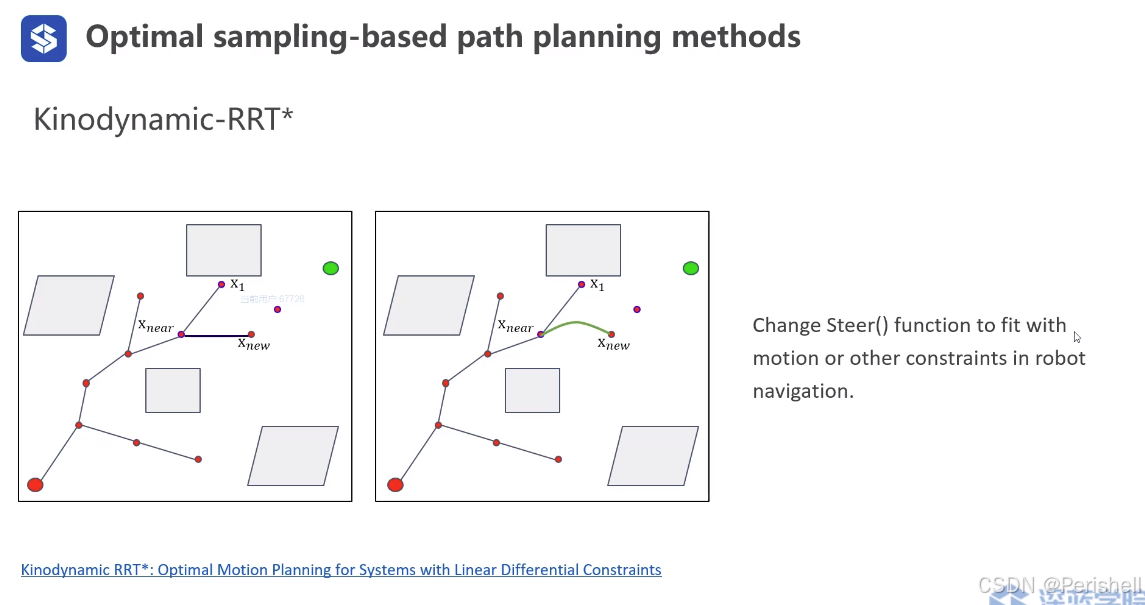
Kinodynamic-RRT*
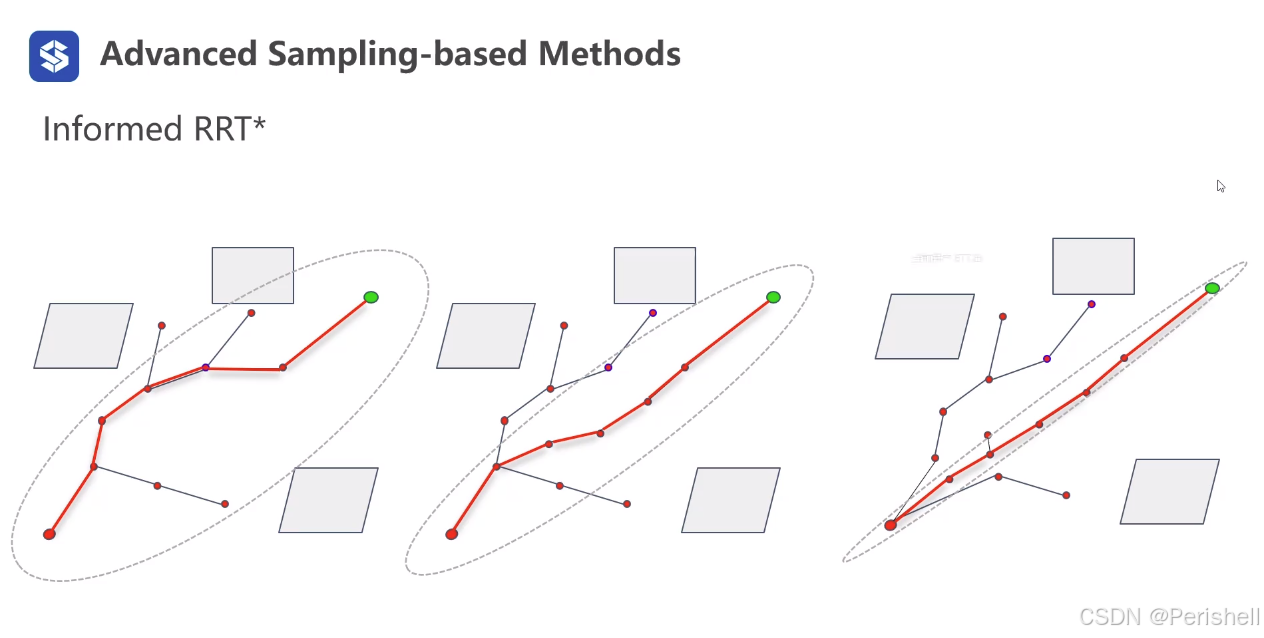
 Informed RRT*
Informed RRT* 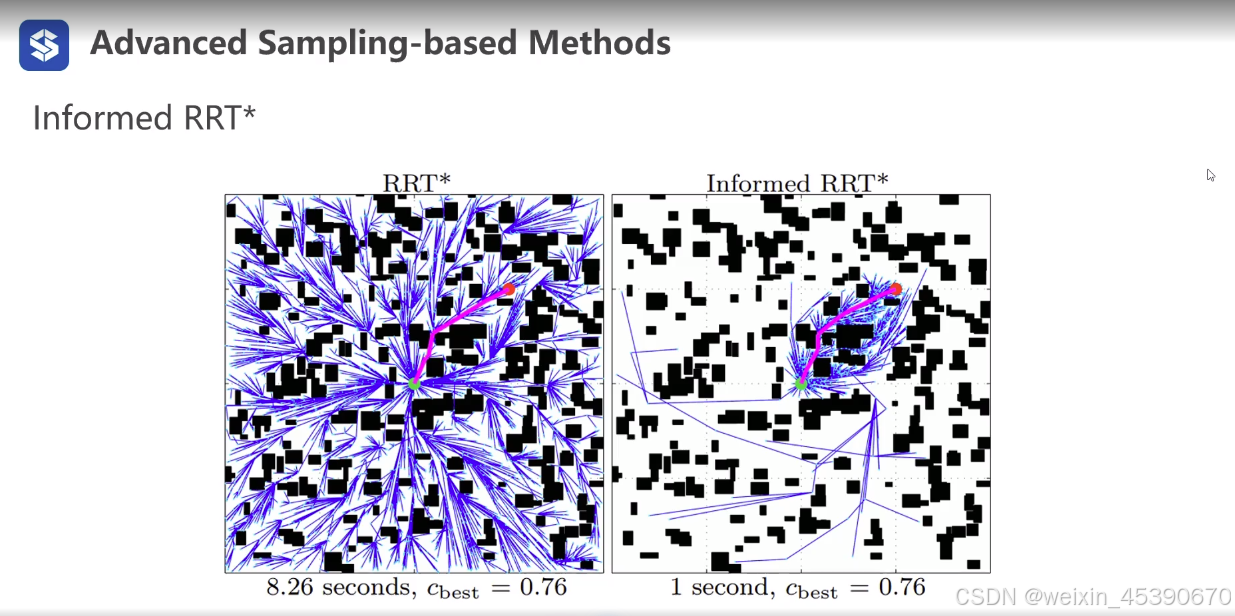
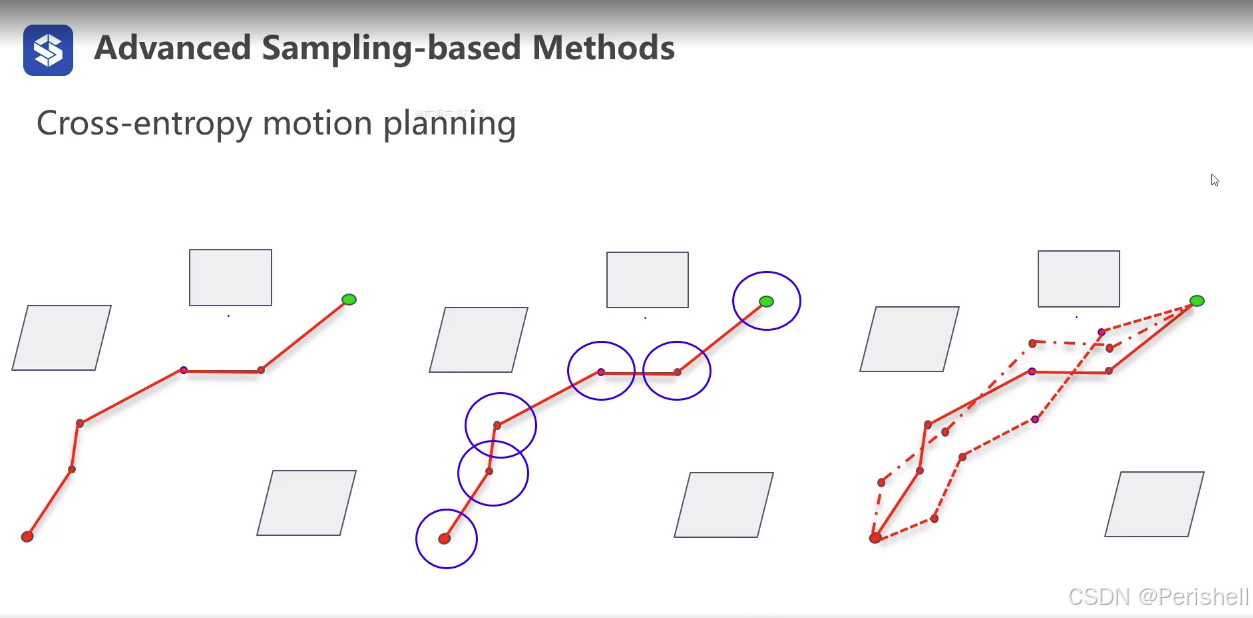
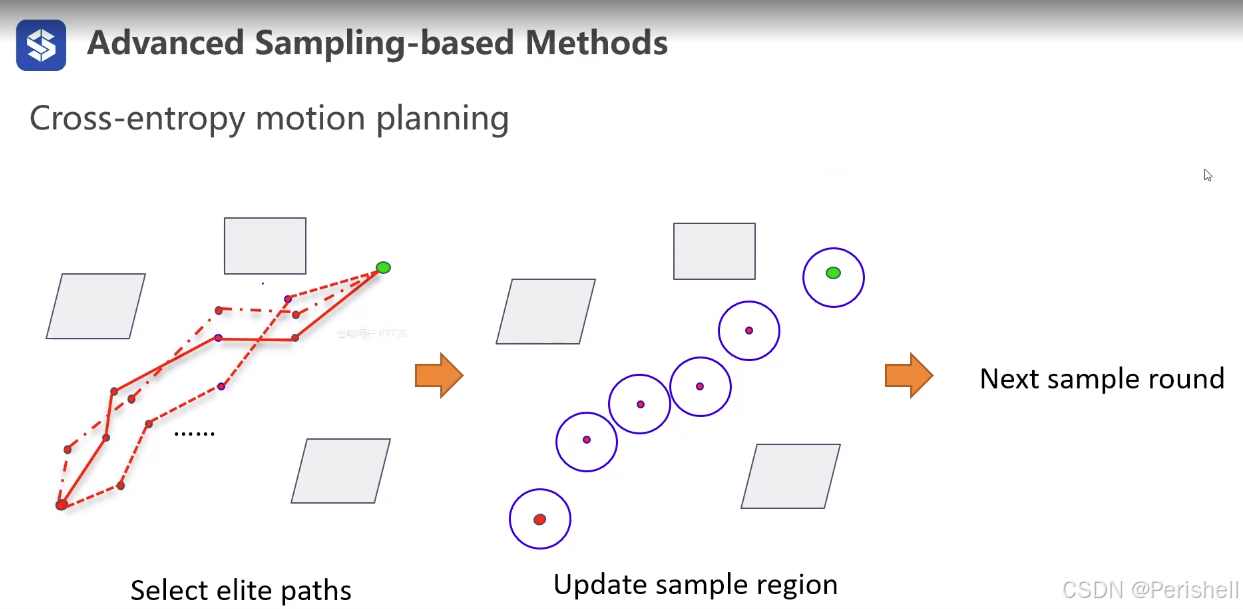
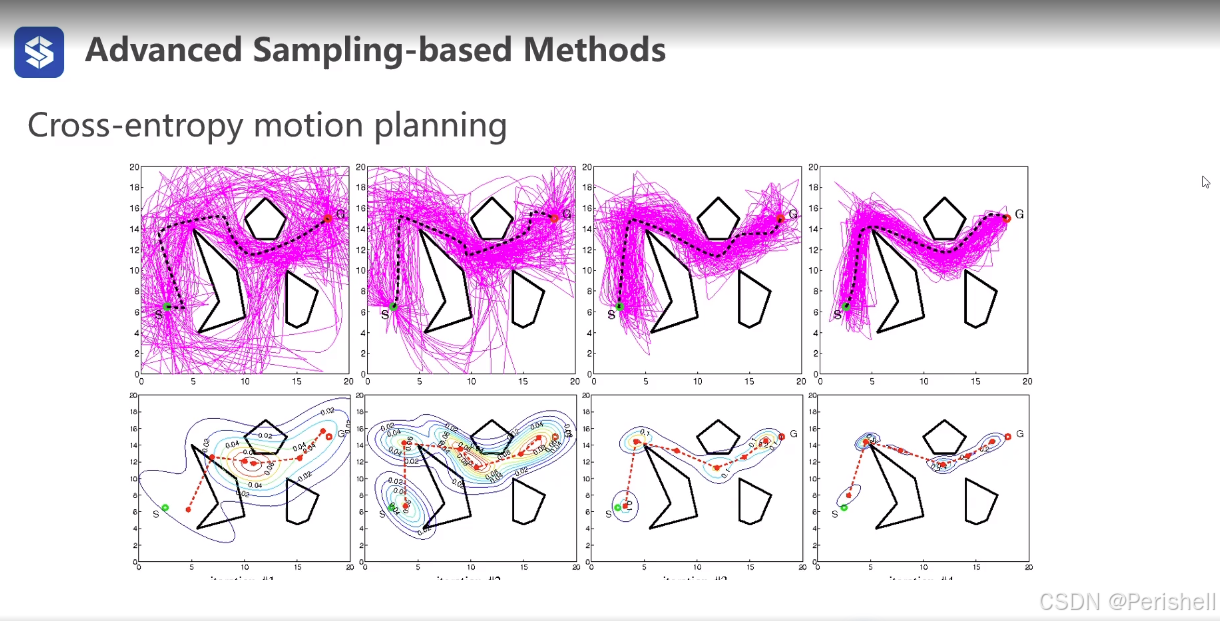
Cross-entropy motion planning
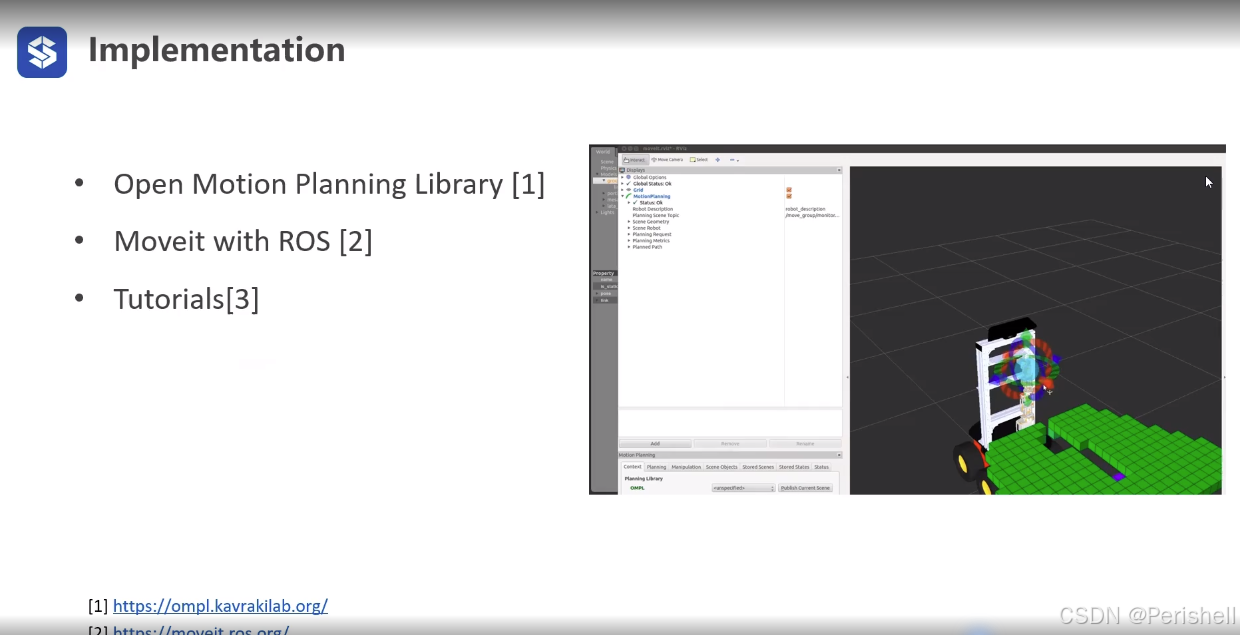
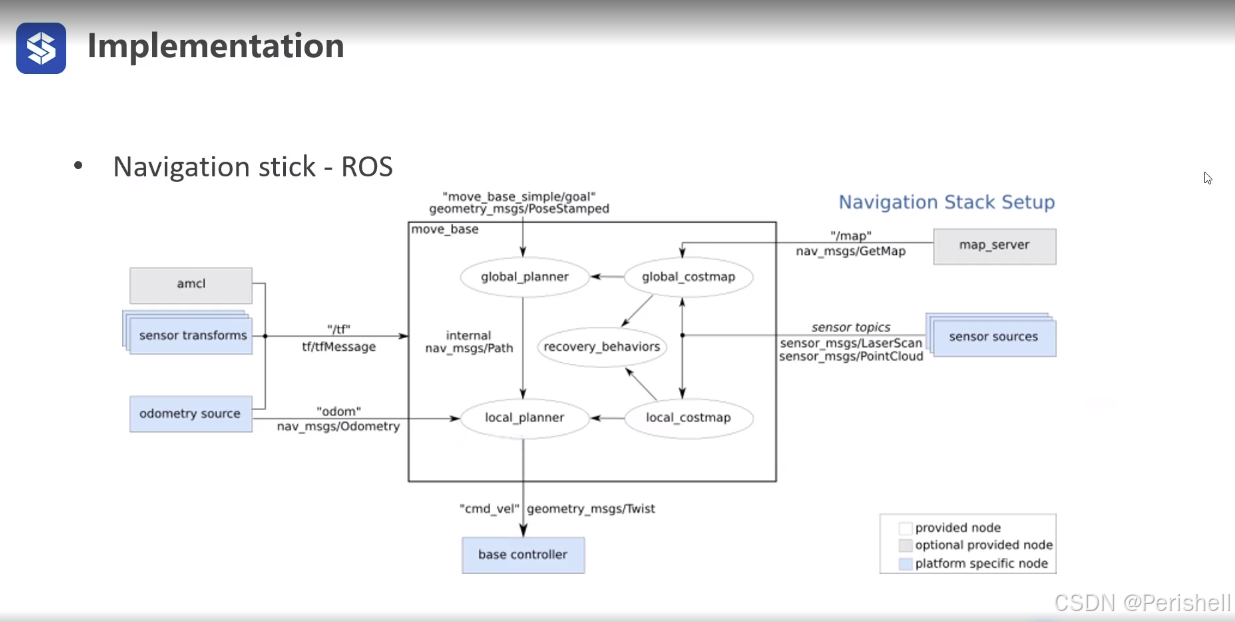
Open Motion Planning Library

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 3
3 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)