基于灰狼优化算法的路径规划方法-附源码
Maximum numbef of iterations迭代次数。% Number of search agents狼群数量。3.完整源码获取:https://mbd.pub/o/bread/Zpiblp9y。1.MatlabR2018b及以上版本一键运行;2.具有良好的编程习惯,程序均包含简要注释。
内容简介:
路径规划是机器人技术中的重要组成部分,它涉及到如何在给定的环境中找到最优的路径来完成任务。在过去的几十年里,许多路径规划算法被提出和研究
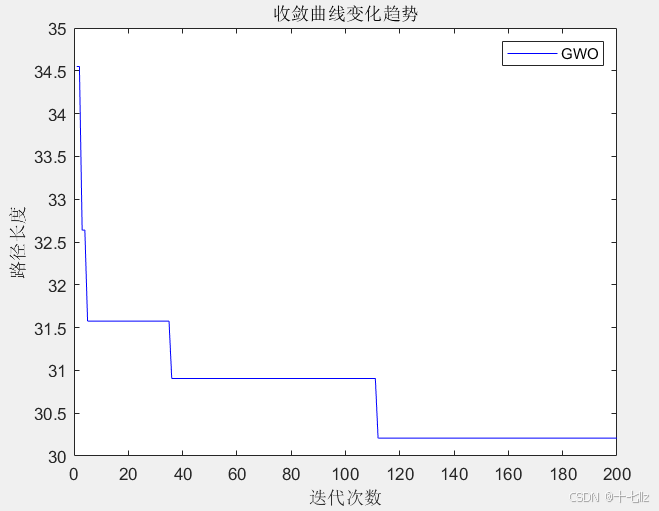
灰狼优化算法(Grev Wolf Optimization,GwO)是一种模拟灰狼群体行为的优化算法。这种算法具有较强的全局搜索能力和收敛速度快的特点因此在路径规划领域中具有广泛的应用潜力。
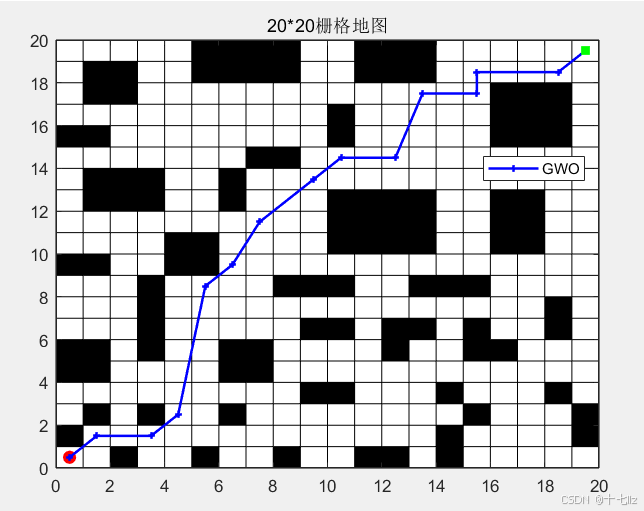
在基于灰狼优化的机器人路径规划算法中,首先需要定义问题的目标函数和约束条件。目标函数可以是机器人到达目标点的时间最短、能量消耗最小或路径长度最短等。约束条件可以是机器人在运动过程中的避障要求、速度限制等。
实验结果:
部分代码:
clc
clear
close all
tic
%% 地图
for i=1:20/2
for j=1:20
m=G(i,j);
n=G(21-i,j);
G(i,j)=n;
G(21-i,j)=m;
end
end
%%
S = [1 1];
E = [20 20];
G0 = G;
G = G0(S(1):E(1),S(2):E(2));
[Xmax,dimensions] = size(G);
dimensions = dimensions - 2;
%% 参数设置
SearchAgents_no=20; % Number of search agents狼群数量
Max_iteration=200; % Maximum numbef of iterations迭代次数
X_min = 1;
代码简介:
1.MatlabR2018b及以上版本一键运行;
2.具有良好的编程习惯,程序均包含简要注释。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 15
15 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)