Hi-Link的人脸识别FM225模组介绍
注意:FM225的工作电压最低为5.5v。
一 人脸识别模块
1.基于 OpenMV 的低成本方案:集成摄像头 + 微控制器
2.专用人脸识别模块(如 DFRobot、汉王)
3.基于普通摄像头的DIY方案:成本低,但是开发难度高(需要自己完成算法)
4.上位机处理方案(手机 / 服务器):STM32 仅负责图像采集,将数据上传至手机或服务器处理; 利用云端强大算力,精度极高; 但涉及 API 费用(如百度人脸识别 API)

二 Hi-Link的人脸识别模块
1.HLK-FM223:双目 3D 活体检测算法,搭载双目摄像头
2.HLK-FM225:由人脸算法主板、双目摄像机和红外 LED 灯组成,具有低功耗、小体积、性价比高的特点(价格更亲民) 适用于对成本敏感的场景,如普通智能家居门禁等
3.HLK-FM888:红外 + 可见光双目人脸识别算法模组、可存储 500 张人脸数据 适用于大型企业、学校考勤、智能门锁等场景
4.HLK-TX510:基于人工智能芯片 TX510 开发,AI 算力为 1.2T@8bit/9.6T@binary,支持混合精度 适用于对安全性和识别速度要求较高的场景
5.HLK-KT210:采用勘智 K210 芯片方案,搭载双摄像头,支持离线检测和双目活检,可防止照片 / 视频攻击 还可用于本地音视频显示播放或远程视频音频传输,适用于办公楼、智能家居等场景
6.HLK-FR1002:专为智能门锁、智能门禁系统等设计,采用高性能应用处理器,配备双目摄像头,支持 3D 活体检测 适用于中小规模的门禁、考勤等场景
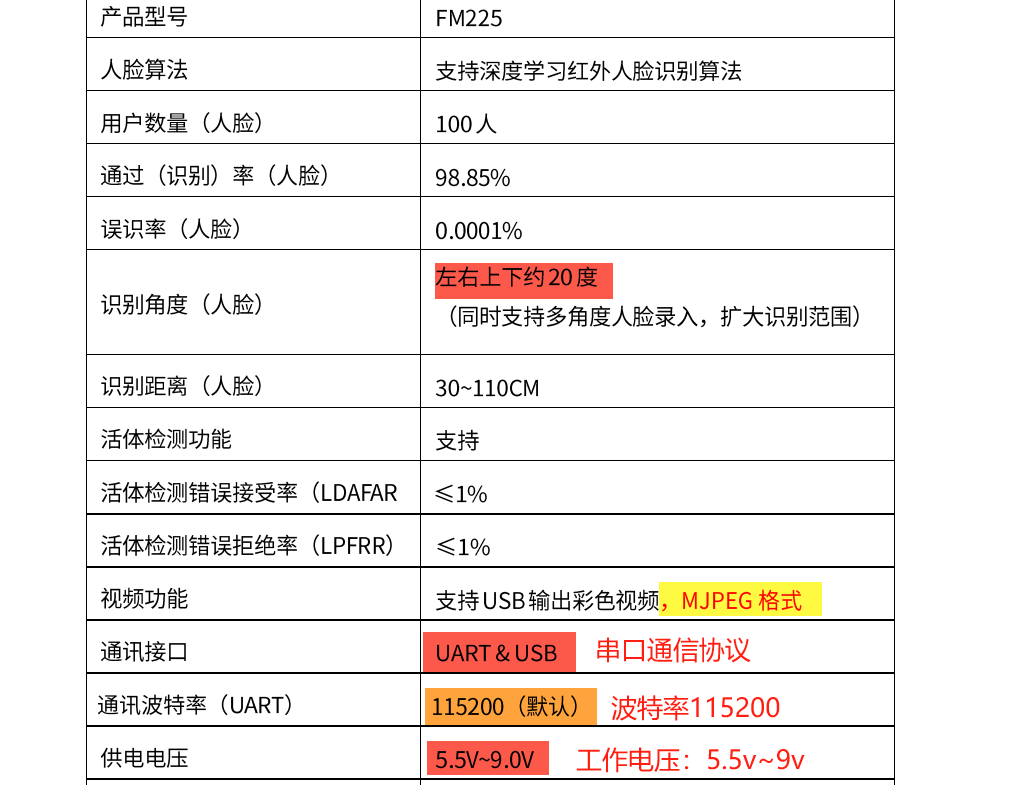
三 FM225
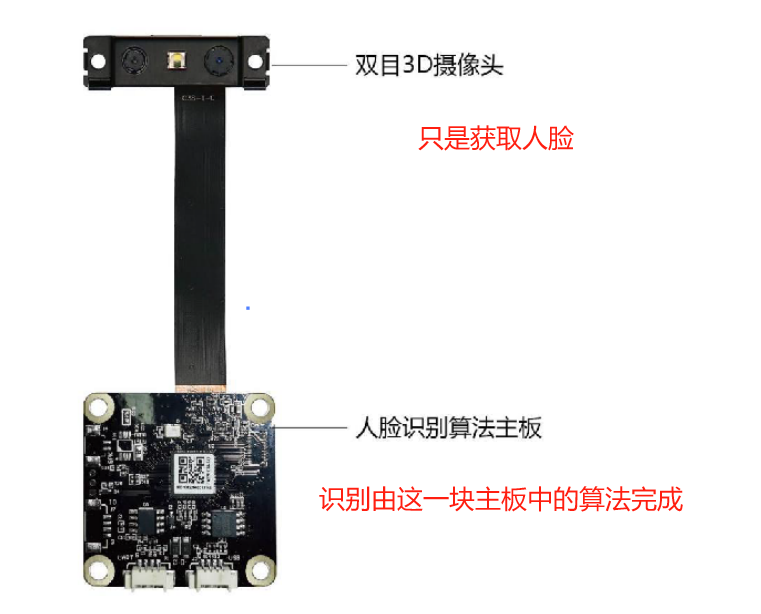
1.介绍
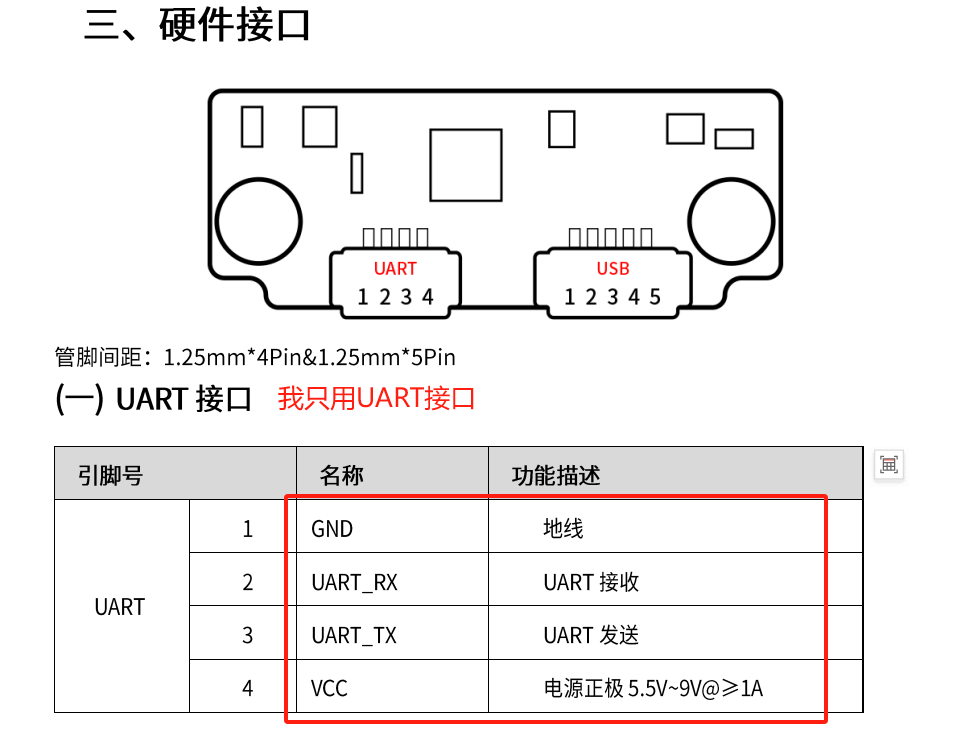
2.硬件引脚
注意:FM225的工作电压最低为5.5v
3.通信参数
注意:这里写的是不使用奇偶校验而已,不代表它不需要校验!!!
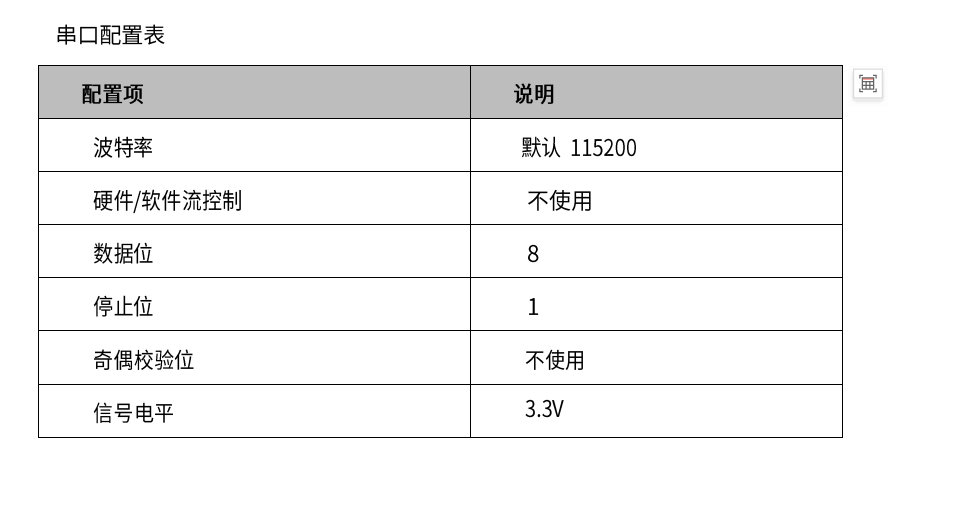
手册中的数据帧部分写了需要用XOR校验!!!
P16页:
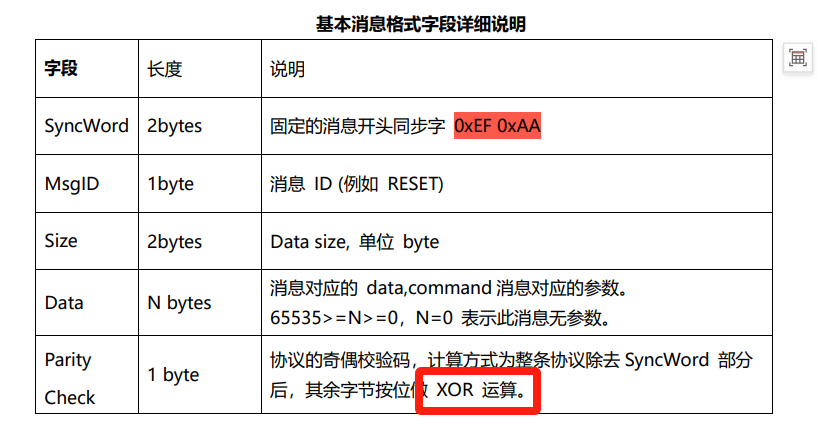
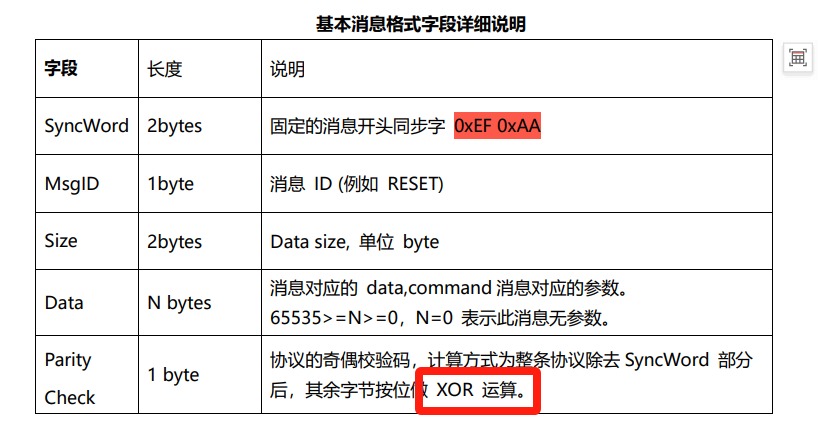
XOR校验(按位异或校验):
(1)校验对象:整条消息中,除去 SyncWord(0xEF 0xAA)后的所有字节(包括 MsgID、Size、Data)
(2)将这些字节按位依次做按位异或运算,结果作为 ParityCheck 字段 (3)作用:用于检测通信过程中的数据错误(如电磁干扰导致的比特翻转),确保指令和反馈的准确性
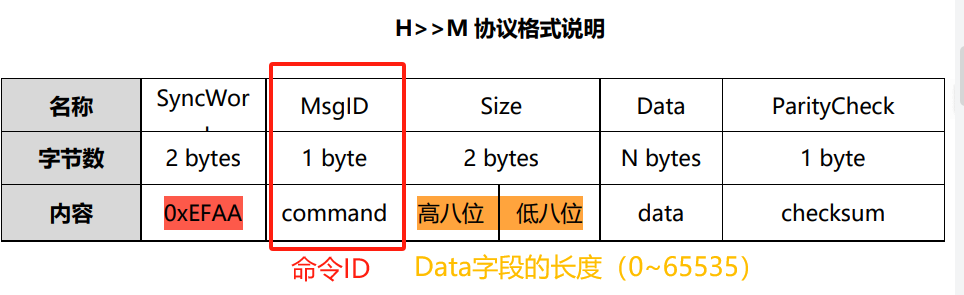
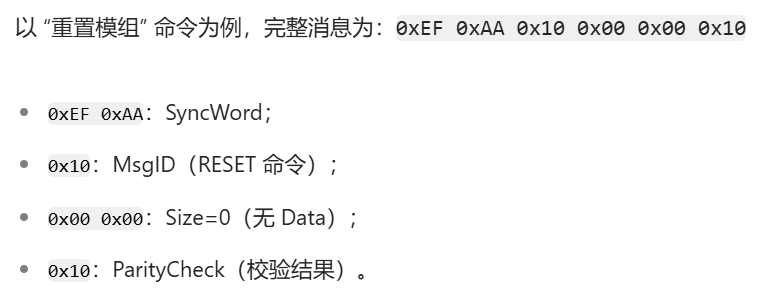
eg:H>>M 的 “重置命令” 消息 0xEF 0xAA 0x10 0x00 0x00 0x10
将0x10、0x00、0x00 按位异或 结果为0x10 ^ 0x00 ^ 0x00 = 0x10
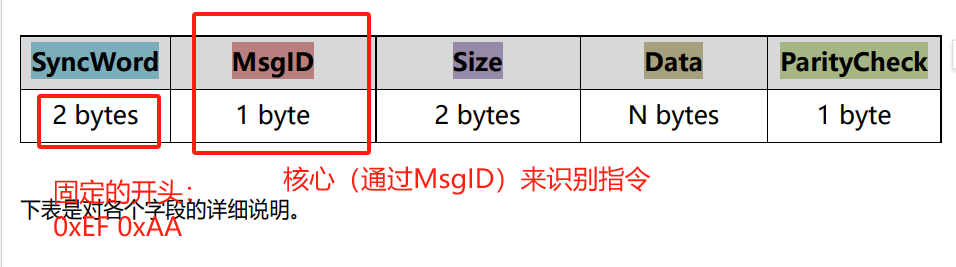
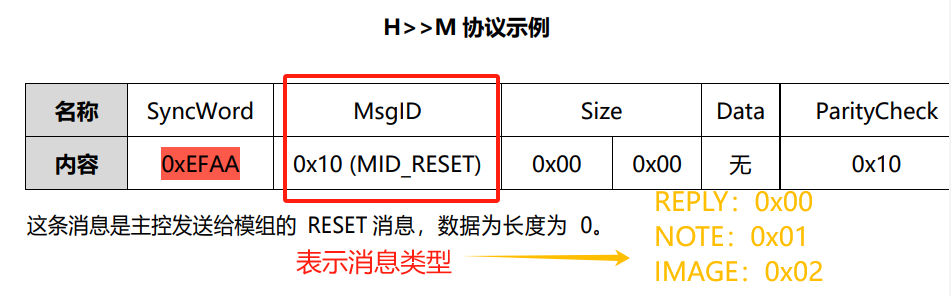
四 数据帧格式
五 通信流程
H:Host(主控)
M:Module(组件,模块)
H>>M 中MsgID是命令 ID
M>>H 中MsgID是消息类型 ID
1.人脸识别模块---接收来自---主控的消息(H>>M,主控→模组)
主控向 FM22x 模组发送命令,模组根据命令执行对应操作
数据帧格式:MsgID是命令 ID
eg:
2.主控---接收来自---人脸识别模块的消息(M>>H,模组→主控)
模组向主控返回信息,包括命令执行结果、主动上报的状态等
数据帧格式:MsgID是消息类型 ID
通过这两种消息交互,可实现 “主控下达命令→模组执行→模组返回结果” 的完整流程, 是人脸识别功能的核心通信机制
六 人脸识别核心流程(录入 + 验证)
1.录入
(1)模块上电后,主动发送NOTE(NID_READY)消息,告知主控 “已就绪”
[1]主控给模块上电
[2]模块主动向主控发送“已就绪”的消息:NOTE(NID_READY)
手册P30页:

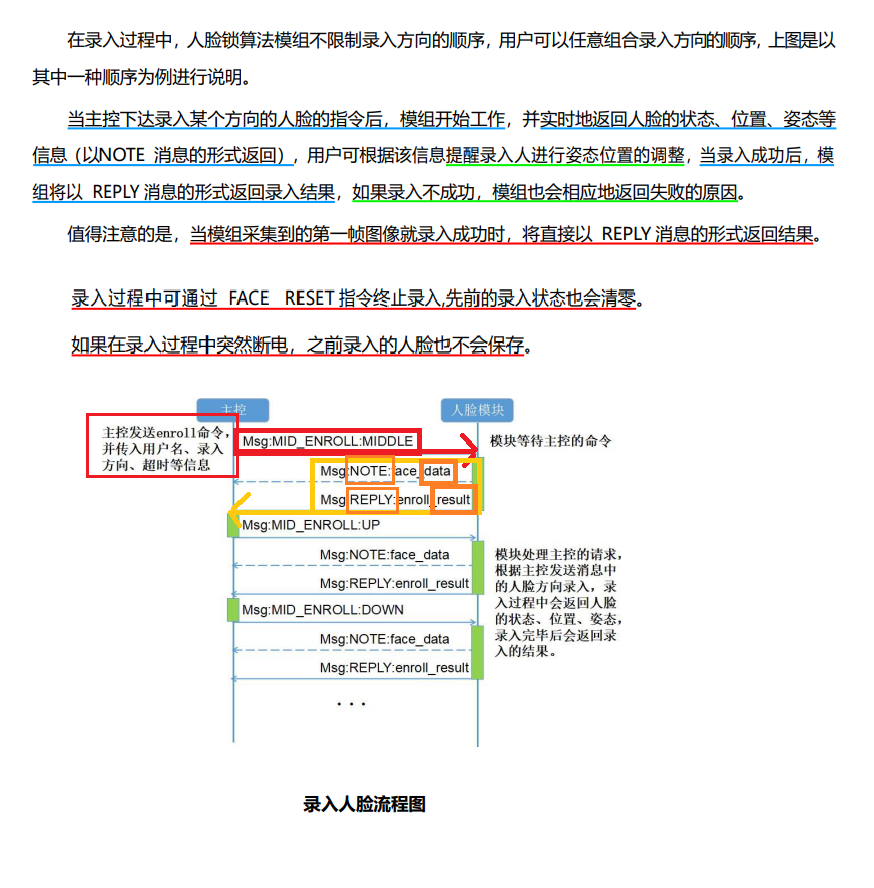
(2)主控发送MID_ENROLL指令,携带参数
[1]主控向模块发送携带参数的指令(用户名、录入方向、超时等)
[2]模块向主控返回 NOTE:录入不成功,返回人脸状态、位置 REPLY:若录入成功,返回录入结果
手册28页:
2.验证
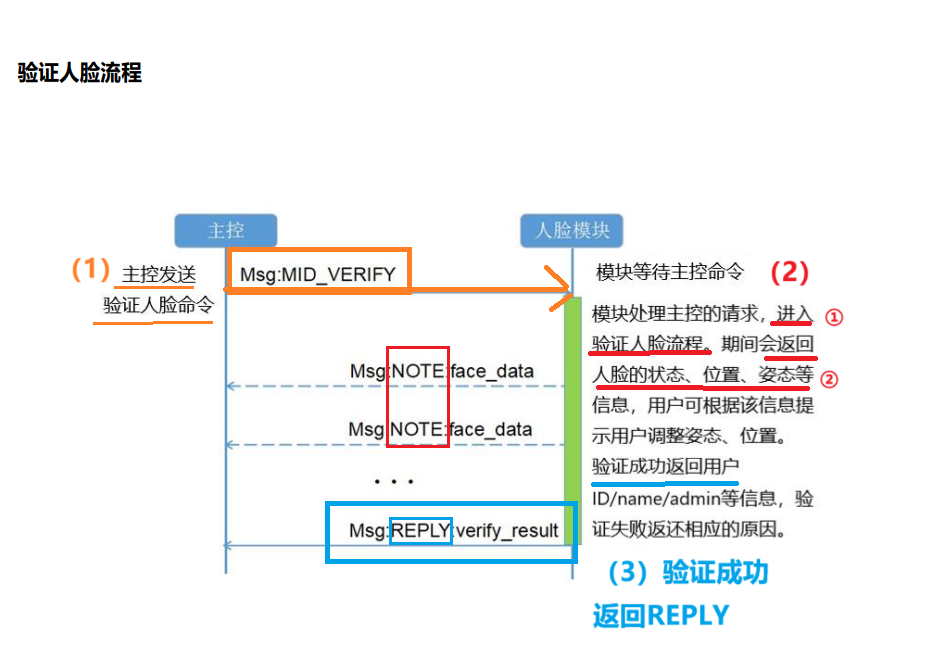
(1)主控发送MID_VERIFY指令(eg:指定验证超时时间)
(2)模块进入识别状态,实时通过NOTE(NID_FACE_STATE)消息返回当前人脸状态(如位置、姿态),辅助用户调整
(3)模块验证成功后,通过REPLY消息返回结果:
手册32页:

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)