SIGGRAPH'2024 | RTG-SLAM:基于3DGS的大尺度场景实时三维重建
本次分享我们邀请到了浙江大学计算机辅助设计与图形学国家重点实验室在读博士彭哲晰,为大家详细介绍他们的工作:RTG-SLAM.如果您有相关工作需要分享,欢迎文末联系我们!RTG-SLAM: Real-time 3D Reconstruction at Scale Using GaussianSplatting论文地址:https://arxiv.org/pdf/2404.19706我们提出了实时高.
本次分享我们邀请到了浙江大学计算机辅助设计与图形学国家重点实验室在读博士彭哲晰,为大家详细介绍他们的工作:RTG-SLAM.如果您有相关工作需要分享,欢迎文末联系我们!
RTG-SLAM: Real-time 3D Reconstruction at Scale Using Gaussian Splatting
论文地址:https://arxiv.org/pdf/2404.19706
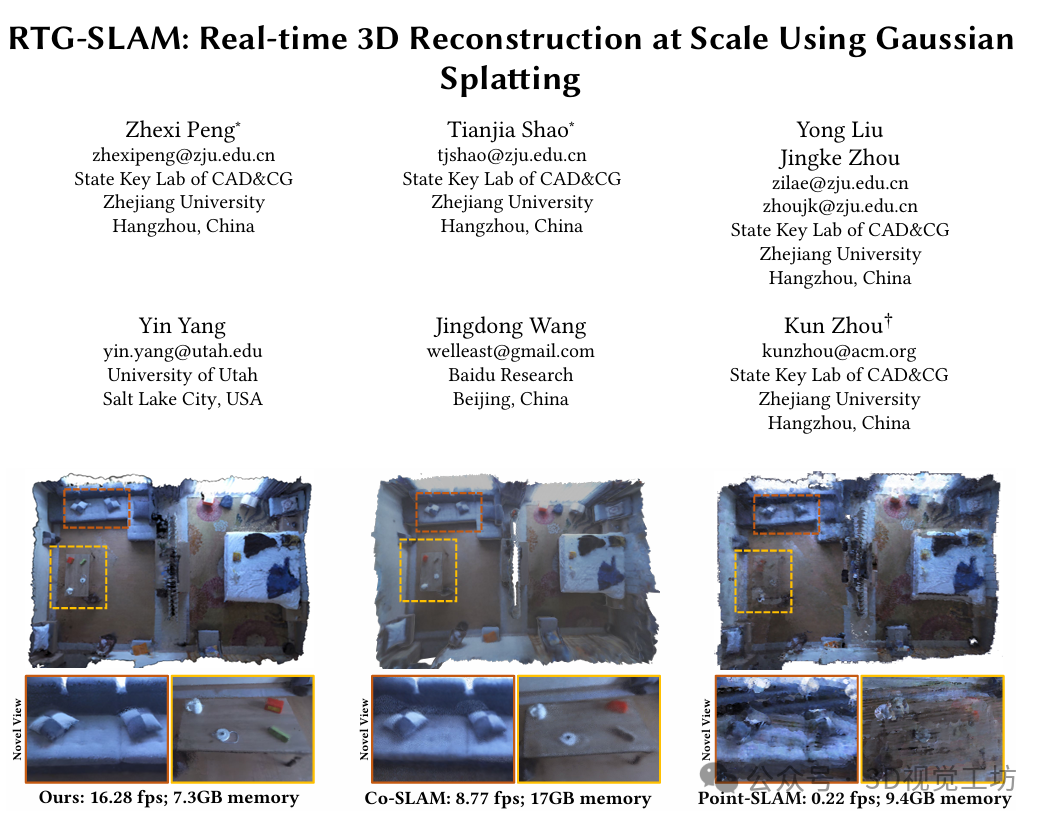
我们提出了实时高斯 SLAM (RTG-SLAM),这是一种使用高斯溅射的带有RGBD相机的实时 3D 重建系统,适用于大规模环境。该系统具有紧凑的高斯表示和高效的动态高斯优化方案。我们强制每个高斯都是不透明的或几乎透明的,不透明的高斯适合表面和主色,透明的高斯适合残差色。通过以不同于颜色渲染的方式渲染深度,我们让单个不透明的高斯很好地适应局部表面区域,而无需多个重叠的高斯,从而大大降低了内存和计算成本。对于动态高斯优化,我们明确为每帧三种类型的像素添加高斯:新观察到的、颜色误差较大的和深度误差较大的。我们还将所有高斯分为稳定和不稳定,其中稳定的高斯预计可以很好地拟合之前观察到的 RGBD 图像,否则不稳定。我们只优化不稳定的高斯函数,只渲染不稳定高斯函数所占的像素。这样,需要优化的高斯函数数量和需要渲染的像素数量都大大减少,而且优化可以实时完成。我们展示了各种大型场景的实时重建。与最先进的基于 NeRF 的 RGBD SLAM 相比,我们的系统实现了相当高质量的重建,但速度提高了大约两倍,内存成本降低了一半,并且在新颖视图合成的真实感和相机跟踪精度方面表现出色。
直播信息
时间
2024年6月07日(周五)晚上20:00
主题
SIGGRAPH'2024| RTG-SLAM: 基于3DGS的大尺度场景实时三维重建
直播平台
3D视觉工坊哔哩哔哩
扫码观看直播,或前往B站搜索3D视觉工坊观看直播

3DCV视频号也将同步直播
嘉宾介绍

彭哲晰
浙江大学计算机辅助设计与图形学国家重点实验室在读博士。研究方向为3D视觉,主要是室内场景的三维重建、编辑与理解。
直播大纲
-
RGB-D SLAM(Simultaneous Localization and Mapping)现有方法回顾
-
RTG-SLAM论文详解
-
后续研究方向的讨论
参与方式

注:本次分享我们邀请到了浙江大学计算机辅助设计与图形学国家重点实验室在读博士彭哲晰,为大家详细介绍他们的工作:RTG-SLAM。如果您有相关工作需要分享,欢迎联系:cv3d008

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 0
0 0
0- 0



 已为社区贡献157条内容
已为社区贡献157条内容

所有评论(0)