C++/OpenGL 入门(6):与平移、旋转和缩放矩阵相关数学基础
齐次法( homogeneous notation )表示3D坐标: (X, Y, Z, 1)GLSL 数据类型中,Vec4 可以通过齐次法来表达点的坐标,同理 vec3 就是含有3个元素的元组GLSL 语言中,数据类型mat4 表示 4 x 4 的矩阵GLM 中,有一个类 class 叫 mat4,表示 4 x 4 的矩阵 单位矩阵:identity matrix在 GLM中,调用函
齐次法( homogeneous notation )表示3D坐标: (X, Y, Z, 1)
GLSL 数据类型中,Vec4 可以通过齐次法来表达点的坐标,同理 vec3 就是含有3个元素的元组
GLSL 语言中,数据类型mat4 表示 4 x 4 的矩阵
GLM 中,有一个类 class 叫 mat4,表示 4 x 4 的矩阵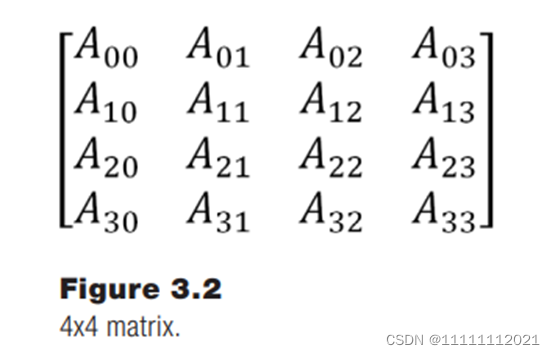
单位矩阵:identity matrix
在 GLM中,调用函数 glm::mat4 m(1.0f) 创造一个4x4 的单位矩阵,叫m
转置矩阵,求 mat4的转置矩阵
GLM中:`glm::transpose(mat4)`
GLSL中:`transpose(mat4)`
矩阵加法,对应位置的元素相加
GLSL中,“`+`”
矩阵右乘点左边,生成新的点坐标
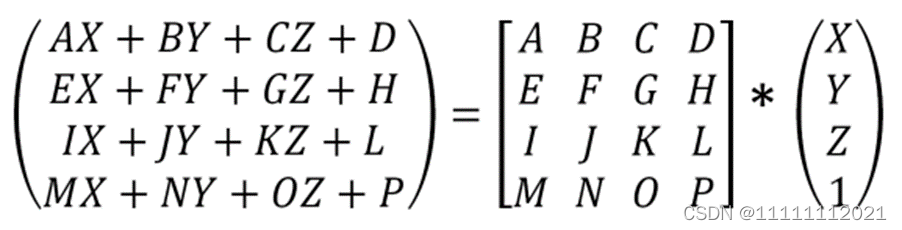
在 GLSL 和 GLM中用 “ * ”来表示矩阵相乘
以下两个式子相等,


逆矩阵,在GLM和GLSL中都是 mat4.inverse()
变换矩阵
平移 translation
旋转 rotation
缩放矩阵 scale
投影矩阵 projection
目视 look-at
平移矩阵 translation
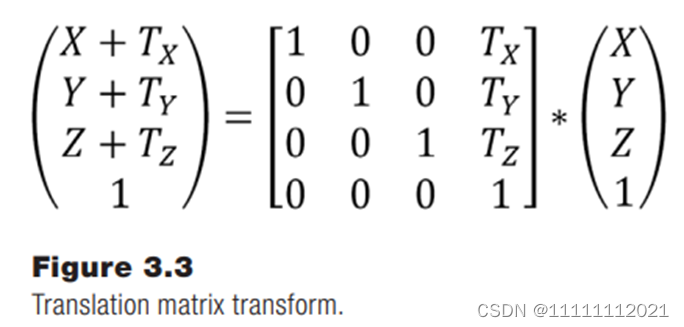
其中,第四列的 Tx,Ty,Tz,是平移过程中的增量
GLM中有函数能构造平移矩阵,如 mat4 = glm::translate(x,y,z) , 然后 mat4 * vec4 得到平移后的矩阵
缩放矩阵 scaling
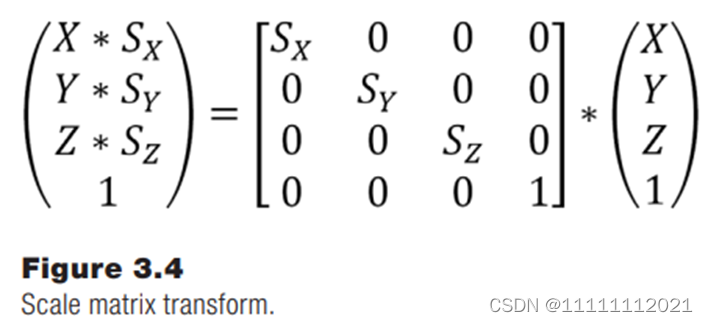
GLM 的缩放函数:mat4 = glm::scale(x,y,z); mat4 * vec4;
左手坐标系和右手坐标系的变换矩阵(与缩放矩阵同形式):
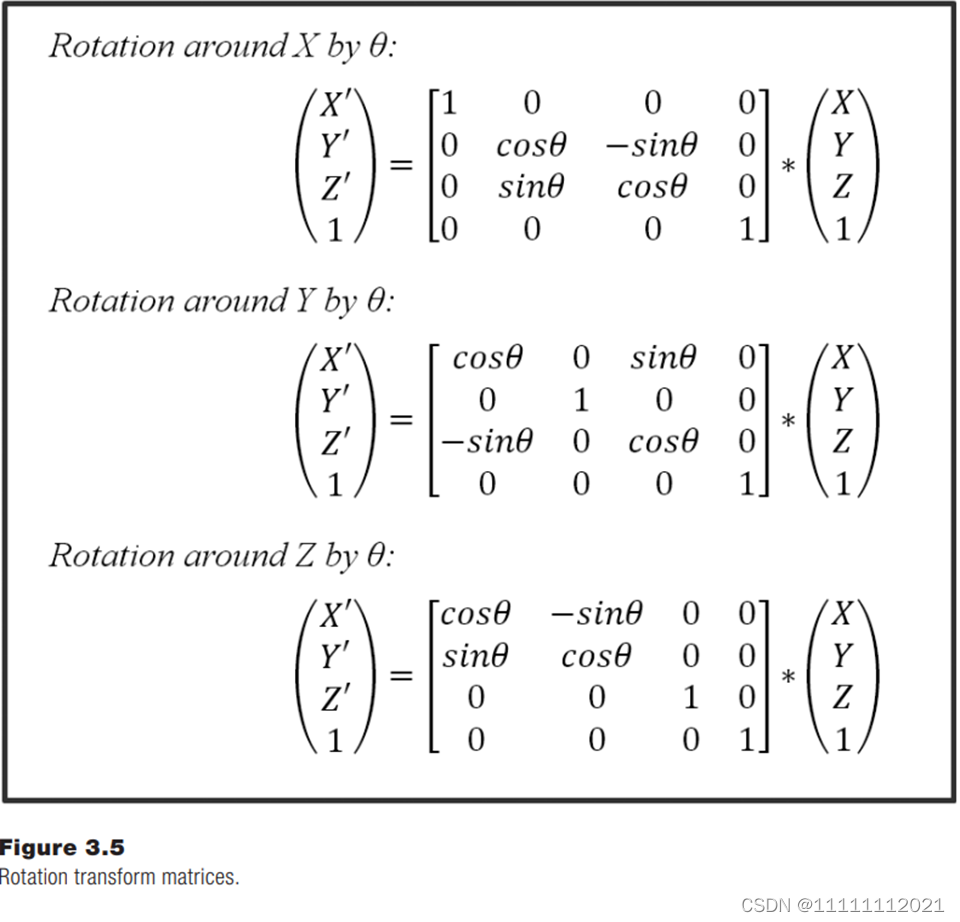
旋转矩阵涉及一个坐标轴(x,y, z)和一个角度 θ
GLM 的函数表示为: `glm::rotate(mat4, θ, x, y, z)` // 创造经过(0,0,0)和(x,y,z)的轴线,绕着该轴旋转θ角度
如果绕空间中的任意一个轴旋转,有三个步骤:
① 将这个轴线平移至经过原点
② 物体绕着新轴线进行旋转θ角度
③ 根据轴线的平移偏移量,将物体反向平移
向量 vector
向量可以表示为 A(u,v,w) and B(x,y,z):
A ± B = (u ± x, v ± y, w ± z) ;
glm: `vec3 ± vec3`
GLSL: `vec3 ± vec3`
求单位向量
glm: `normalize(vec3) or normalize(vec4)`
GLSL: `normalize(vec3) or normalize(vec4)`
标量积
A ● B = ux + vy + wz
glm:`dot(vec3,vec3) or dot(vec4,vec4)`
GLSL: `dot(vec3,vec3) or dot(vec4,vec4)`
向量积
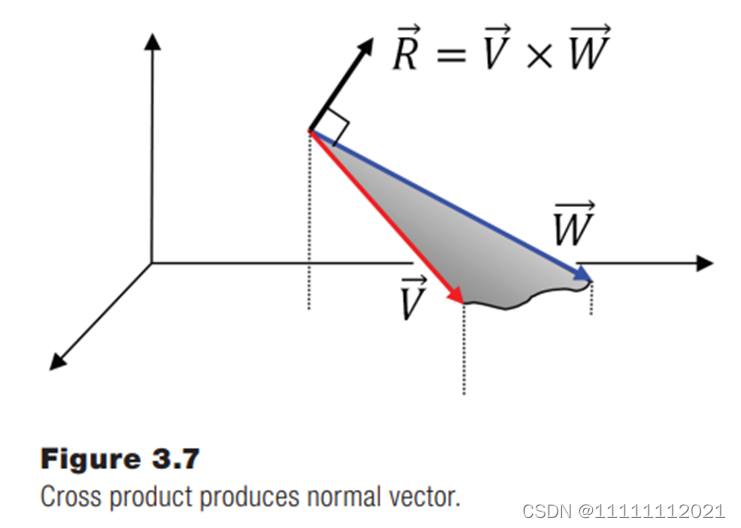
A x B = (vz-wy, wx-uz, uy-vx)
glm: `cross(vec3,vec3)`
GLSL: `cross(vec3,vec3)`
长度:GLSL and GLM : `length()`
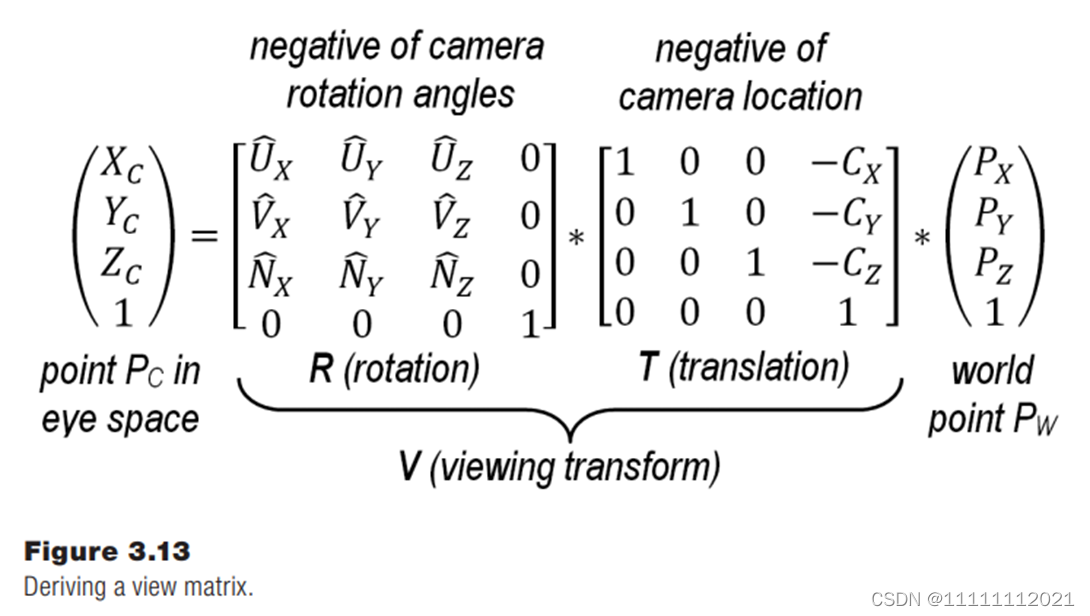
视觉空间,eye space
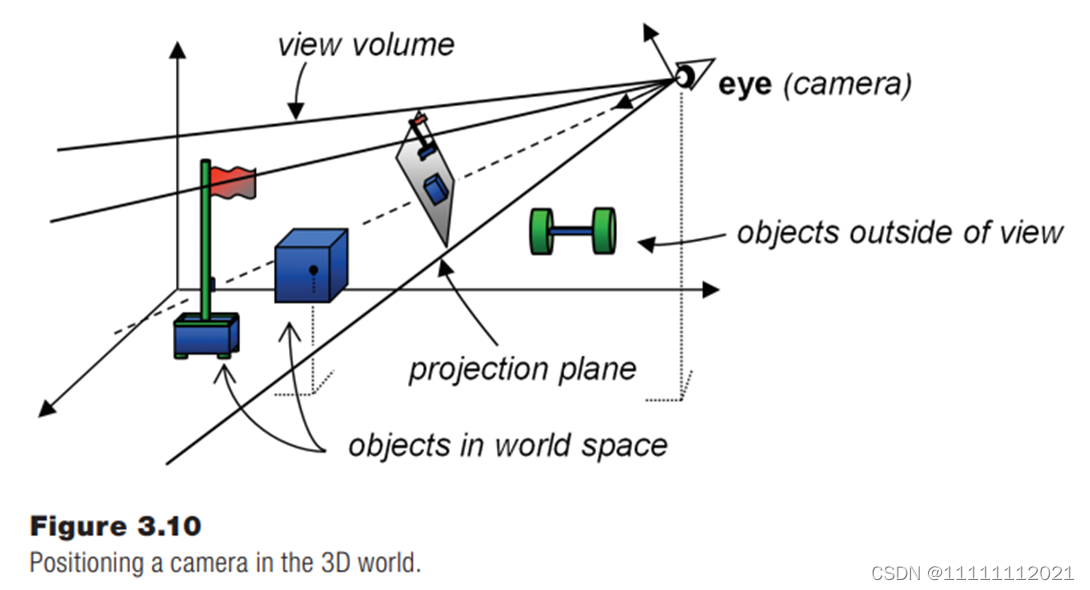
OpenGL有一个固定在远点的相机,面向z的负半轴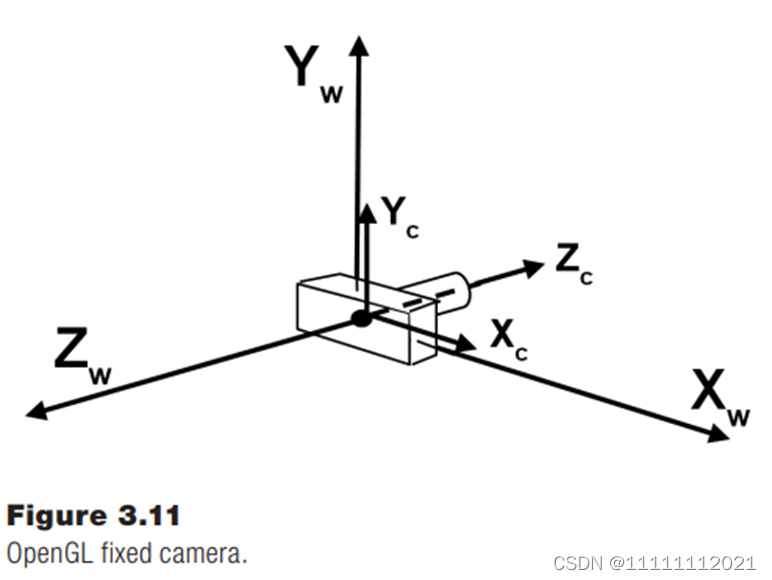
世界坐标系下,有点Pw,需要求该点到以摄像机为坐标系的相机空间中的点坐标 Pc
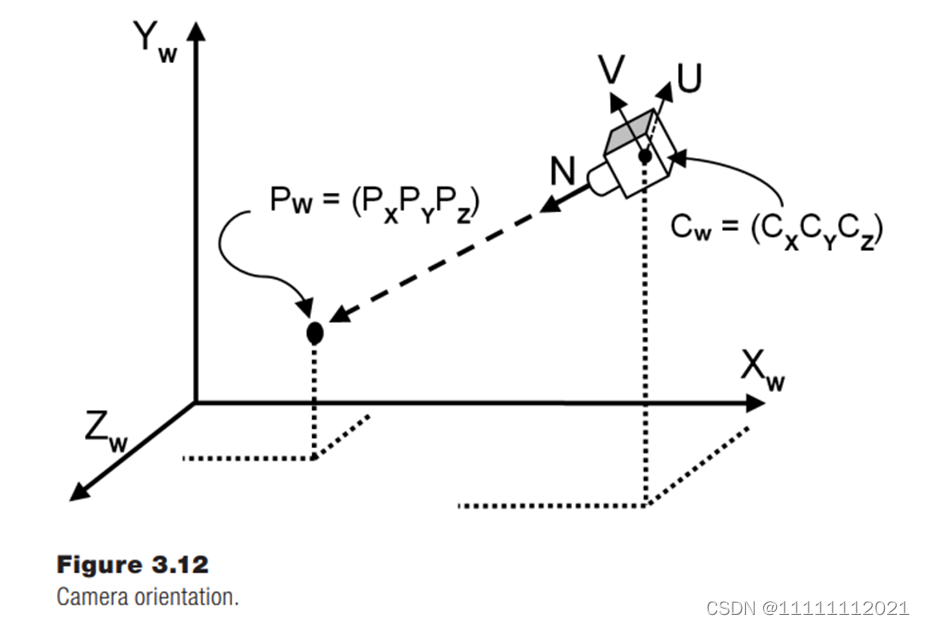
思路是:Pw 先平移,再旋转
viewing transform matrix 检视变换矩阵 V: 矩阵中既包括旋转也包括平移信息
V 是由 平移矩阵 T 和旋转矩阵R组成的
model-view (MV) matrix : MV = V * M
透视矩阵 / 透视变换 perspective matrix
有四个参数:
(a) aspect ratio, 长宽比
(b) field of view, 视野
© projection plane or near clipping plane, 最近投影平面
(d) far clipping plane 最远投影平面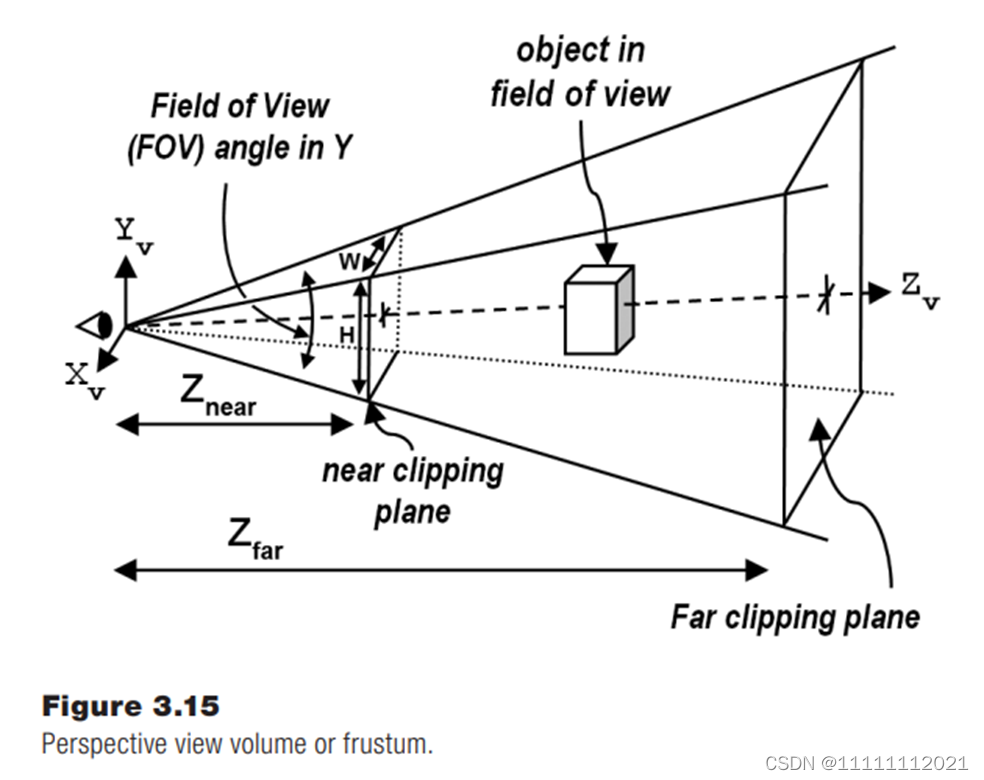
投影矩阵的参数与矩阵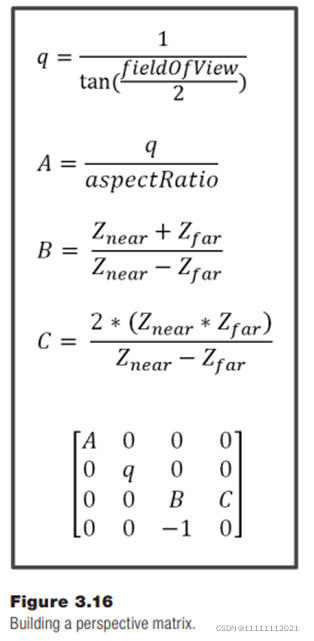
GLM的函数:glm::perspective() 用于生成透视矩阵
正交投影矩阵The Orthographic Projection Matrix
投影后,长度面积等都不变。这玩意是平行投影。
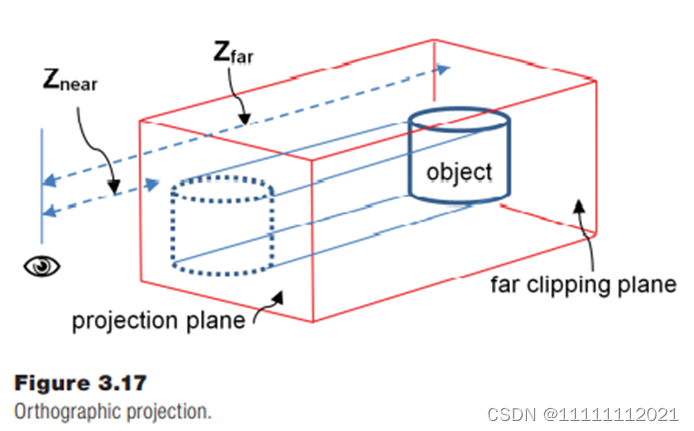
正交投影矩阵(平行投影)的参数有:
(a) the distance Znear from the camera to the projection plane,
(b) the distance Zfar from the camera to the far clipping plane,
© L, R, T, and B的值,其中 L和R是投影平面边缘最左边和最右边的x轴坐标;T和B是投影平面边缘最顶端和底端的Y轴坐标
以下是平行投影变换矩阵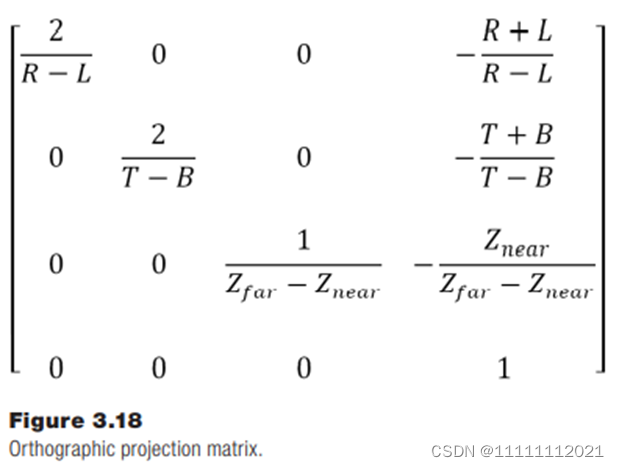
LOOK-AT MATRIX 视场矩阵
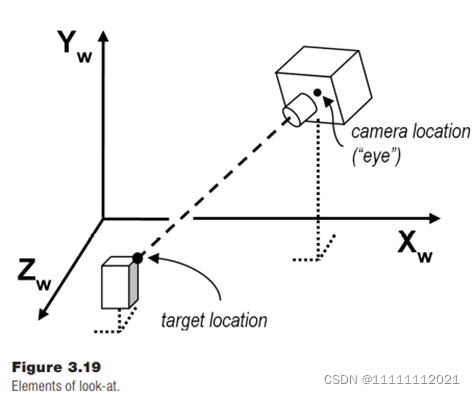
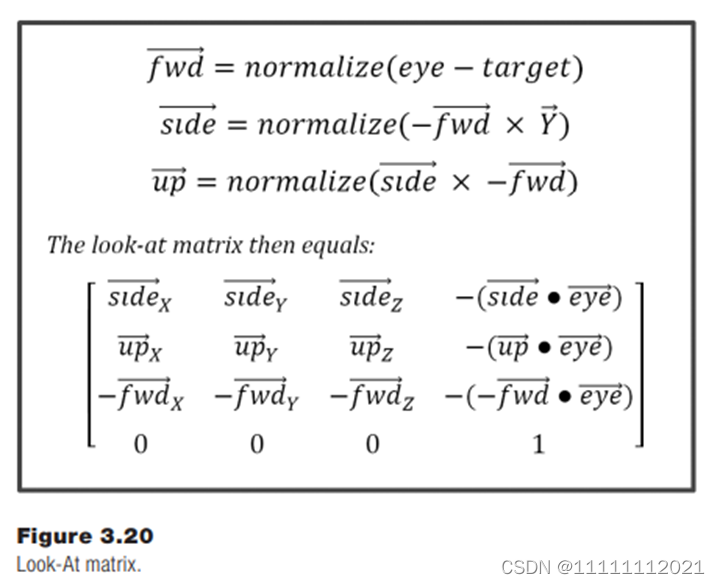
相关函数:glm::lookAt()
自定义矩阵
mat4 translationMatrix = mat4(1.0, 0.0, 0.0, 0.0,// 注意这是最左边一列,不是最上面一行
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
tx, ty, tz, 1.0 );

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 1
1 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)