视觉SLAM第十讲实践-位姿图优化-g2o_viewer安装问题
问题:g2o_viewer没有被安装弯路:在g2o软件包目录/home/nanorobot/slambook2/3rdparty/g2o/g2o/apps/g2o_viewer下找到g2o_viewer,并编译g2o_viewer,在cmake ..后发现报错,尝试网上的帖子对camkelists.txt进行修改,还是会有很多报错。解决方法:1、先安装一些库:sudo apt-get instal
问题:g2o_viewer没有被安装
弯路:在g2o软件包目录/home/nanorobot/slambook2/3rdparty/g2o/g2o/apps/g2o_viewer下找到g2o_viewer,并编译g2o_viewer,在cmake ..后发现报错,尝试网上的帖子对camkelists.txt进行修改,还是会有很多报错。
解决方法:
1、先安装一些库:
sudo apt-get install libsuitesparse-dev qtdeclarative5-dev qt5-qmake
sudo apt-get install libqglviewer-dev-qt52、重新编译整个g2o库
cd g2o
mkdir build #已经建立了请忽略
cd build
cmake ..
make
sudo make install
#安装到电脑上的意思3、动态链接库问题
安装成功 g2o_viewer之后,运行 g2o_viewer 会出现链接动态库失败的错误。
经查找,可以在/usr/local/lib 中找到 libqglviewer.so 文件。
错误的原因是/usr/local/lib不在系统查找.so文件的路径下。需自行添加路径。
在/etc/ld.so.conf文件中添加/usr/local/lib目录,然后更新缓存sudo ldconfig。
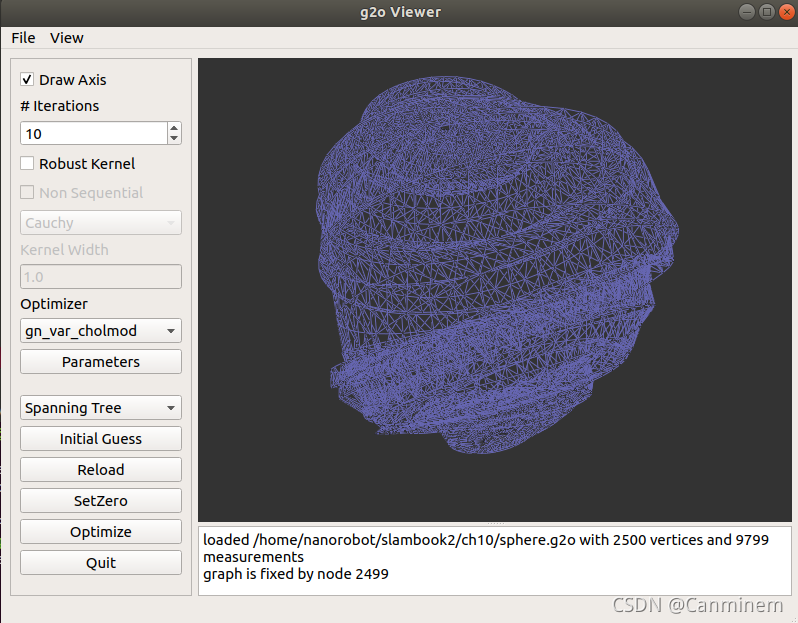
4. 打开g2o_viewer
在g2o/bin目录下运行:
~/slambook2/3rdparty/g2o/bin$ ./g2o_viewer并且点击可视化界面file->load,把“sphere.g2o”文件加载,结果如下图:

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)