下垂控制算法的c语言实现_PID控制算法的C语言实现(1) PID算法原理
在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了。先看看PID算法的一般形式:PID的流程简单到了不能再简单的程度,通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。这里我们规定(在t时刻):1.输入量...
在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了。先看看PID算法的一般形式:
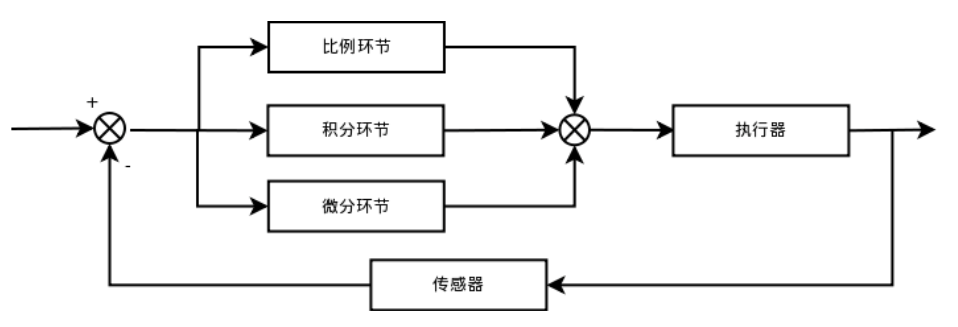
PID的流程简单到了不能再简单的程度,通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。这里我们规定(在t时刻):
1.输入量为rin(t);
2.输出量为rout(t);
3.偏差量为err(t)=rin(t)-rout(t);
PID的控制规律为

理解一下这个公式,主要从下面几个问题着手,为了便于理解,把控制环境具体一下:
1.规定这个流程是用来为直流电机调速的;
2.输入量rin(t)为电机转速预定值;
3.输出量rout(t)为电机转速实际值;
4.执行器为直流电机;
5.传感器为光电码盘,假设码盘为10线;
6.直流电机采用PWM调速转速用单位转/min 表示;
不难看出以下结论:
1.输入量rin(t)为电机转速预定值(转/min);
2. 输出量rout(t)为电机转速实际值(转/min);
3.偏差量为预定值和实际值之差(转/min);
那么以下几个问题需要弄清楚:
1.通过PID环节之后的U(t)是什么值呢?
2.控制执行器(直流电机)转动转速应该为电压值(也就是PWM占空比)。
3.那么U(t)与PWM之间存在怎样的联系呢?
每个电压对应一个转速,电压和转速之间呈现线性关系。但是考虑这种方法的前提是把直流电机的特性理解为线性了,而实际情况下,直流电机的特性绝对不是线性的,或者说在局部上是趋于线性的,这就是为什么说PID调速有个范围的问题。
所以在正式进行调速设计之前,需要现有开环系统,测试电机和转速之间的特性曲线(或者查阅电机的资料说明),然后再进行闭环参数整定。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 0
0 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)