【高中生讲机器学习】27. 贝叶斯网络详解!超!系!统!
贝叶斯网络超级详细 & 系统的解释!!! 包看得懂的!
创建时间:2024-11-28
首发时间:2024-12-04
最后编辑时间:2024-12-04
作者:Geeker_LStar
你好呀~这里是 Geeker_LStar 的人工智能学习专栏,很高兴遇见你~
我是 Geeker_LStar,一名高一学生,热爱计算机和数学,我们一起加油~!
⭐(●’◡’●) ⭐
诶嘿!我又来啦~!
前三篇讲了集成学习(还有一篇集成学习的会在后面写),这篇我们来讲概率图模型!
我感觉概率图模型是机器学习里超难的一块(CMU 甚至有专门的一个系列课来讲它,非常的复杂…),这一篇我们来讲概率图模型中的一半——贝叶斯网络!(还有一半是马尔可夫网络,会在后面讲~
文章目录
概率图模型简介
enen,在介绍贝叶斯网络之前,我们需要先对概率图模型有个大概的认识。
回顾这个系列之前所有的文章,到现在为止我们讲的所有模型(除了 HMM)都是针对两个变量之间的关系进行建模——输入 x x x,输出它对应的类别 y y y 或值 y y y.
但是,现实的情况往往没有这么简单。现实中很可能出现很多变量相互依赖的情况,有些时候还会出现多个变量的依赖关系随着时间变化的情况,这意味着我们需要对这种复杂的依赖关系进行建模,而这就不是前面讲过的模型能够解决的问题了。
好在,有一种数据结构可以帮助我们描述并解决这种复杂的问题——图。(woq 想起了被图论支配的恐惧(bushi) 图的每个节点都可以看作一个变量,而图的边则代表这些变量之间的依赖关系。 同时,后面你会看到,图结构可以在很大程度上简化概率的计算。
概率图模型的核心思想就是,通过图结构建模变量之间的依赖关系,再利用图结构简化概率计算。
从这个核心思想出发,我们会得到两个问题:
- 图结构是如何建模依赖关系的?(建模的是什么样的依赖关系?
- 图结构是如何简化概率计算的?
对于这两个问题的不同回答,恰恰就得到了概率图模型的两个分支——贝叶斯网络(Bayesian Network)和马尔可夫网络(Markov Network)。
好吧好吧,先剧透一下。贝叶斯网络使用有向无环图建模变量之间的因果关系,通过 d-separation 简化概率计算;马尔可夫网络使用无向图建模变量之间的对称依赖关系,通过马尔可夫性简化概率计算。
在这篇文章中,我们主要探讨贝叶斯网络。
有向无环图(DAG)
em,为了更好地理解贝叶斯网络,我们先来复习一下有向无环图。
有向无环图,英文全称 directed acyclic graph,简称 DAG。
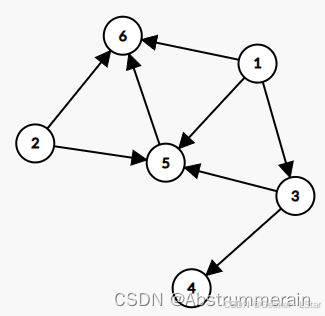
先放一个有向无环图的例子在这:
有向无环图,顾名思义,有两个主要的性质——有向性和无环性。
有向性是指,图中的每一条边都是有方向的。或者说,都是从一个节点出发,指向另一个节点的。
无环性是指,从一个节点出发,沿着箭头方向无论怎么走,都不会回到自身。
同时,我们还需要关注 DAG 中父节点和子节点的概念。
在 DAG 中,箭头发出的节点是父节点,箭头指向的节点是子节点。比如,在上图中,2、3、1 都是 5 的父节点,6 是 5 的子节点。(不是,但是我怎么感觉这个图描述的关系…emmmmm()()()()() 不是我啥也没说。
这些内容本身很好理解,重要的是它们在贝叶斯网络中的使用。我们后面会说到。
嗯!接下来让我们进入正题吧!
贝叶斯网络概述
okiiiii,我们来说说贝叶斯网络!
贝叶斯网络,英文全称 Bayesian Network,简称 BN。它使用有向无环图建模变量之间的因果依赖关系。具体来说,DAG 中的父节点代表 “因”,而子节点代表 “果”。举个例子,A 是 B 的父节点,说明 A 和 B 之间的关系是 “A 导致 B”,B 又是 C 的父节点,说明 B 和 C 之间的关系是 “B 导致 C”。当然如果你深思,这其中还有不少值得探讨的情况,我们在后面会一一说明。
比如,下图就是一个贝叶斯网络:
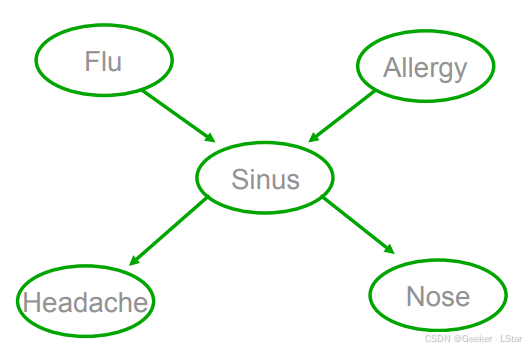
在这个图中,F 和 A 是 S 的父节点,说明 F 和 A 都有可能导致 A;H 和 N 是 A 的子节点,说明 A 有可能导致 H 和 N。贝叶斯网络中的因果关系就是通过 DAG 的有向边来建模的。
嗯,现在我们解释了在 “概率图模型简介” 中提出的第一个关键点——图结构(在贝叶斯网络中是 DAG)是如何建模变量之间的依赖关系的。现在我们转向第二个问题——图结构(DAG)是如何简化概率计算的。
我们先来看简化前的概率计算方式,即使用联合概率的链式展开。
P ( F , A , S , H , N ) = P ( F ) ⋅ P ( A ∣ F ) ⋅ P ( S ∣ A , F ) ⋅ P ( H ∣ S , A , F ) ⋅ P ( N ∣ H , S , A , F ) P(F,A,S,H,N)=P(F) \cdot P(A|F) \cdot P(S|A,F) \cdot P(H|S,A,F) \cdot P(N|H,S,A,F) P(F,A,S,H,N)=P(F)⋅P(A∣F)⋅P(S∣A,F)⋅P(H∣S,A,F)⋅P(N∣H,S,A,F)
也就是说,每个节点都依赖于它前面的所有节点。
推广一下,如果我们有 n n n 个节点,那么联合概率分布就是:
P ( X 1 , X 2 , … , X n ) = P ( X 1 ) ⋅ P ( X 2 ∣ X 1 ) ⋅ P ( X 3 ∣ X 1 , X 2 ) ⋯ P ( X n ∣ X 1 , X 2 , … , X n − 1 ) P\left(X_{1}, X_{2}, \ldots, X_{n}\right)=P\left(X_{1}\right) \cdot P\left(X_{2} \mid X_{1}\right) \cdot P\left(X_{3} \mid X_{1}, X_{2}\right) \cdots P\left(X_{n} \mid X_{1}, X_{2}, \ldots, X_{n-1}\right) P(X1,X2,…,Xn)=P(X1)⋅P(X2∣X1)⋅P(X3∣X1,X2)⋯P(Xn∣X1,X2,…,Xn−1)
可以看到,如果 n n n 很大,这种计算方法简直就是…折磨 GPU 啊!难道就没有简单一点的方法了吗?
well,既然都问了这个问题,说明肯定时可以的(哈哈哈哈哈)。但是,具体要怎么简化呢,这还得从图结构的实际意义出发。
上面这种非人类的计算方式其实隐含了一个意思——我们要计算的节点(的条件概率),和除了它以外的每个节点相关。也就是说,所有的节点都会对这个节点的状态产生影响。
但是,真的是这样吗?
——No!
这就要说到贝叶斯网络中的条件独立性假设了,注意,这点非常重要。
贝叶斯网络的条件独立性假设是说,在给定父节点的情况下,子节点的条件概率只和父节点相关,而和其它非后代节点无关。
换言之,在给定父节点的条件下,子节点和所有非后代节点条件独立。
那么,我们就可以把上面那个极其难算的式子简化成下面这样:
P ( X 1 , X 2 , … , X n ) = ∏ i = 1 n P ( X i ∣ Pa ( X i ) ) P\left(X_{1}, X_{2}, \ldots, X_{n}\right)=\prod_{i=1}^{n} P\left(X_{i} \mid \operatorname{Pa}\left(X_{i}\right)\right) P(X1,X2,…,Xn)=i=1∏nP(Xi∣Pa(Xi))
其中 P a ( X i ) Pa(X_i) Pa(Xi) 是 X i X_i Xi 的父节点。
当然,这背后的原理可没有这么简单,一切还要从 D 分隔说起咯…
D 分隔
D 分隔,或者说 D separation,是判断 DAG 中条件独立性的的方法。它是贝叶斯网络中至关重要(但同时又很不好理解)的一部分,可以说如果没有它,贝叶斯网络的条件独立性也就无从得出,整个后续的计算也就没法进行了。
D 分隔有三种基本类型,从这三种类型出发,我们可以组合得到更多复杂的 DAG;反过来,无论多么复杂的 DAG,在判断两个(或两组)节点在给定另外一些(或一些组)节点时的条件独立性的时候,我们都可以使用 D 分隔来做,后面会说到详细的规则。
不过,在我们深入讨论 D 分隔的三种类型及其对应的条件独立性之前,我们需要先搞明白——条件独立性是什么意思??
条件独立性
首先我们来复习一下,独立性是什么意思来着?两个变量是独立的,可以通过什么样的数学公式来表达?
我记得在朴素贝叶斯那篇中我说过,如果两个变量是独立的,那么它们的联合概率等于它们自身概率的乘积,即:
P ( A , B ) = P ( A ) P ( B ) P(A, B)=P(A)P(B) P(A,B)=P(A)P(B)
对于多个变量也是类似的。
这里的独立性,也可以叫做边缘(marginal)独立性,可以类比边缘概率来理解。即在没有任何额外信息的条件下,两个变量的独立性。
那么,和概率类似,如果有额外信息呢?具体来说,如果我们给定一些其它变量呢?
这就到了条件独立性上场的时候了。
条件独立的定义是:如果在给定第三个变量的条件下,两个变量的条件联合概率等于它们各自条件概率的乘积,就称这两个变量是条件独立的。公式如下:
P ( A , B ∣ C ) = P ( A ∣ C ) P ( B ∣ C ) P(A,B|C)=P(A|C)P(B|C) P(A,B∣C)=P(A∣C)P(B∣C)
上面的公式等价于:
P ( A ∣ C ) = P ( A ∣ B , C ) P(A|C)=P(A|B,C) P(A∣C)=P(A∣B,C)
也就是说,A 和 B 原本不是独立的,但是给定 C 后,A 和 B 就独立了。这样的独立就称作条件独立。(注意理解条件独立和边缘独立的区别o~
再通俗一点,C 解释了 A 和 B 之间的所有关系(相关性),在给定 C 后,任何其它的变量都不会对 A、B 之间的关系做出更多的解释。所以在 C 给定后,A、B 条件独立。
注意,A、B、C 不只可以代表单个变量,也可以代表一组变量。
豪德!我想条件独立性这个概念现在应该已经阐述的比较清楚了。接下来我们可以来考虑考虑 D 分隔的三种情况了…
well,在开始后续的内容之前,我们需要首先明确一下依赖关系中的 head 和 tail:head 代表父节点,或者说发出箭头的节点;tail 代表子节点,或者说箭头指向的节点。
那我们来具体看看 D 分隔的三种类型吧!
tail-to-tail 类型(Fork)
首先是第一种类型,tail-to-tail,也叫共父类型。如下图所示。
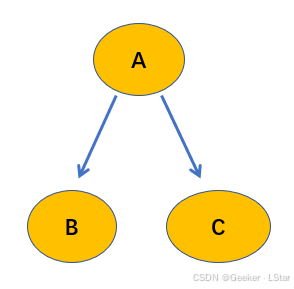
在这种类型中,当 A A A(父节点)被观测到时, B B B 和 C C C(子节点)之间是条件独立的。
写成数学语言就是:
P ( B , C ∣ A ) = P ( B ∣ A ) P ( C ∣ A ) P(B,C|A)=P(B|A)P(C|A) P(B,C∣A)=P(B∣A)P(C∣A)
同时,如果 A 没有被观测到,则 B、C 之间的条件独立性不成立。
no why,这是规定(((
这个类型告诉我们,当父节点给定的时候,子节点和它的兄弟节点条件独立。
head-to-tail 类型(Chain)
第二种类型是 head-to-tail 类型,也叫链式类型,如下图:

当然,方向也可以反过来,变成 C → \to →B → \to →A,不影响。
在这种类型中,当 B B B(父节点)被观测到时, A A A(祖先节点)和 C C C(子节点)之间是条件独立。数学表达式为:
P ( A , C ∣ B ) = P ( A ∣ B ) P ( C ∣ B ) P(A,C|B)=P(A|B)P(C|B) P(A,C∣B)=P(A∣B)P(C∣B)
同样的,如果 B 没有被观测到,那么 A、C 之间的条件独立性不成立。
这个类型告诉我们,当父节点给定的时候,子节点和它祖先节点条件独立。
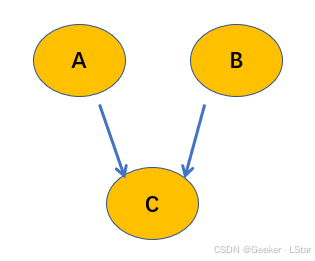
head-to-head 类型(Collider)
head to head,这是第三种类型,也叫对撞类型,V 型类型等等,有很多名字。。(这也是为什么我使用 head 和 tail 来描述,这是最通用的说法,中文世界中的名字太多了,,,)
注意,和前两种类型相比,head-to-head 有点 tricky,如下图所示:
前面我们都在说父节点被观测到的情况,但在这种类型中,情况稍稍发生了一些变化…
在 h-to-h 类型中,当 C C C(子节点)被观测到的时候, A A A 和 B B B(父节点)非条件独立。公式为:
P ( A , B ∣ C ) ≠ P ( A ∣ C ) P ( B ∣ C ) P(A, B|C)\neq P(A|C)P(B|C) P(A,B∣C)=P(A∣C)P(B∣C)
而大概 C C C 没有被观测到时候, A A A 和 B B B 独立(注意这里是独立而非条件独立),即:
P ( A , B ) = P ( A ) P ( B ) P(A,B)=P(A)P(B) P(A,B)=P(A)P(B)
一定要注意呀,这个类型和前面的都不一样,首先它被观测到的是子节点,第二它的结论是非条件独立,恰好和上面两种类型反过来。
这个类型告诉我们,当子节点给定的时候,它的父节点们非条件独立。
以上就是 D 分隔的三种基本情况,了解了这三种情况后,我们就可以从它们出发,推导更复杂的网络中的条件独立性。
嗯…如果你觉得上面这些东西实在是太复杂了,搞不懂,你可以忽略它们,直接记住下面要讲到的结论就可以,这些内容是为了推导出下面的结论做铺垫的。
ennnn!! 以上就是 D 分隔的三种类型,现在我们可以从它们出发,开始推导贝叶斯网络的条件独立性了…!!! 这是整个贝叶斯网络中最核心的部分!
启动!
贝叶斯网络的条件独立性
来了来了!终于来了!这是贝叶斯网络的核心!它很短,但很重要!
(这也是为什么我单独给它开了一个部分哈哈哈哈((
贝叶斯网络的条件独立性是指,在给定父节点的情况下,子节点和所有非后代节点条件独立。
天知道我用了多长时间才彻底理解它!。。。。
在这一部分,我们的目标就是,从 D 分隔出发,一步步说明贝叶斯网络条件独立性的合理性。
换言之,在这一部分,我们希望搞明白,为什么贝叶斯网络的条件独立性是这样的。
没错,它可不是随便规定的(不像朴素贝叶斯中的独立性假设),它是可以从 D 分隔中严格推导出来的。
在开始之前,请牢记 D 分隔的三条规则:
1)当父节点被观测到时,它的子节点之间彼此条件独立
2)当父节点被观测到时,它的子节点和祖先节点条件独立
3)当子节点被观测到时,它的父节点之间彼此非条件独立
从这三条规则出发,我们来分析一种情况,如下图所示。
(当然,除此之外,还有很多很多复杂的情况,不过我们的重点是从 D 分隔出发,推导出贝叶斯网络的条件独立性,而不是单纯的 D 分隔练习,所以更复杂的情况在此处就不展开讨论了。
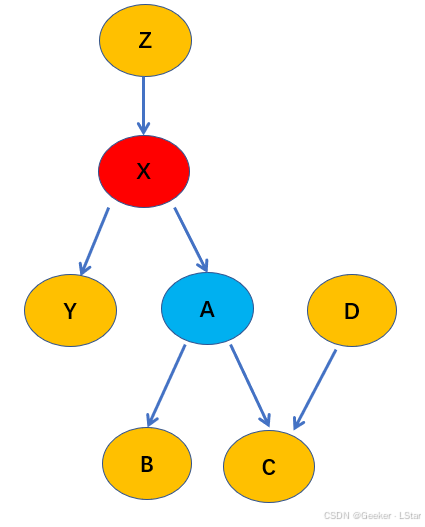
现在,节点 X 被观测到了(红色),请问节点 A(蓝色)的条件独立性?
首先,根据三条规则的第一条(tail-to-tail),A 它的兄弟节点,或者说 X 的其它子节点,在这个例子中也就是 Y,条件独立。
then,根据三条规则的第二条,A 和它的祖先节点,在这个例子中也就是 Z Z Z,条件独立。
好的,接下来,我们重点考虑 A 和它的子节点 B、C,以及它的子节点的其它父节点 D,之间的条件独立性。
首先我们先不考虑子节点 B、C,只考虑 A 和 D 的条件独立性。
根据三条规则的第三条,当 C 没有被观测到的时候,A 和 D 是独立的,同时 X 不和 A、D 形成 head-to-head 结构,这表明在给定 X 且不给定 C 的条件下,A 和 D 关于 X 条件独立。
第二步,我们把 B、C 也纳入考虑。
根据三条规则的第三条,此时 A → \to →C ← \gets ←D 形成 head-to-head 结构,且 C 被观测到,所以此时 A 和 D 条件不独立。这表明,原本条件独立的两个节点(A 和 D),可能会在给定 A 的后代节点(C)之后,变得非条件独立。
也就是说,后代节点会引入额外的相关性。
同时,因为 A 和 B、C 之间本来就直接相连,根据 D 分隔的三条规则,它们之间显然条件不独立。
趁热打铁,更进一步思考。
对于一个节点来讲,和它有关系的节点有哪些种类?只有以下五种:
- 父节点
- 兄弟节点
- 祖先节点
- 后代节点
- 后代节点的其它父节点
现在,我们已经根据 D 分隔,说明了在给定父节点的情况下,子节点(给定的父节点的子节点)和它的兄弟节点、祖先节点、后代节点的其它父节点,都是条件独立的;同时,它和它的后代节点是非条件独立的。
把这句话浓缩一下!
在给定父节点的情况下,子节点和所有非后代节点条件独立。
这是什么!这不就是贝叶斯网络的条件独立性吗!
这里再说明一下为什么是和 “所有非后代节点条件独立”,这句话其实有两层意思。
第一层,给定父节点时,子节点和它的后代节点非条件独立。
第二层,给定父节点时且不给定后代节点的时候,子节点和所有其它节点(也就是所有非后代节点)条件独立;但是,一旦引入后代节点,子节点就不一定和所有非后代节点条件独立了,因为后代节点会引入额外的相关性(比如我们上面说到的 head-to-head 的例子)。
好耶!!~(撒花!!
那么,现在我们可算是真正明白了贝叶斯网络中的条件独立性了!
贝叶斯网络的参数学习
okay,现在我们终于明白贝叶斯网络的条件独立性是怎么一回事了!接下来,我们可以使用它来做更多的事情…
前面说过,对于贝叶斯网络,我们需要确定的是它的结构和参数。按理说应该是先确定结构,再根据确定的结构去 “寻找” 参数。不过,实际情况和这个乍一看很正确的想法稍有出入,后面我会说到,这里先卖个关子啦~
我们先来讲贝叶斯网络的参数学习(而不是结构学习),后面你会知道这个顺序的道理。
em,在一切开始之前,我们需要先明确,在贝叶斯网络中,我们要学习的 “参数” 是什么?
这涉及到一个新的概念——条件概率表(conditional probability table,简称 CPT)。这个表给出了每个节点的条件概率,即在这个节点的父节点取不同值的时候,这个节点出现(为真)的概率,如下图。
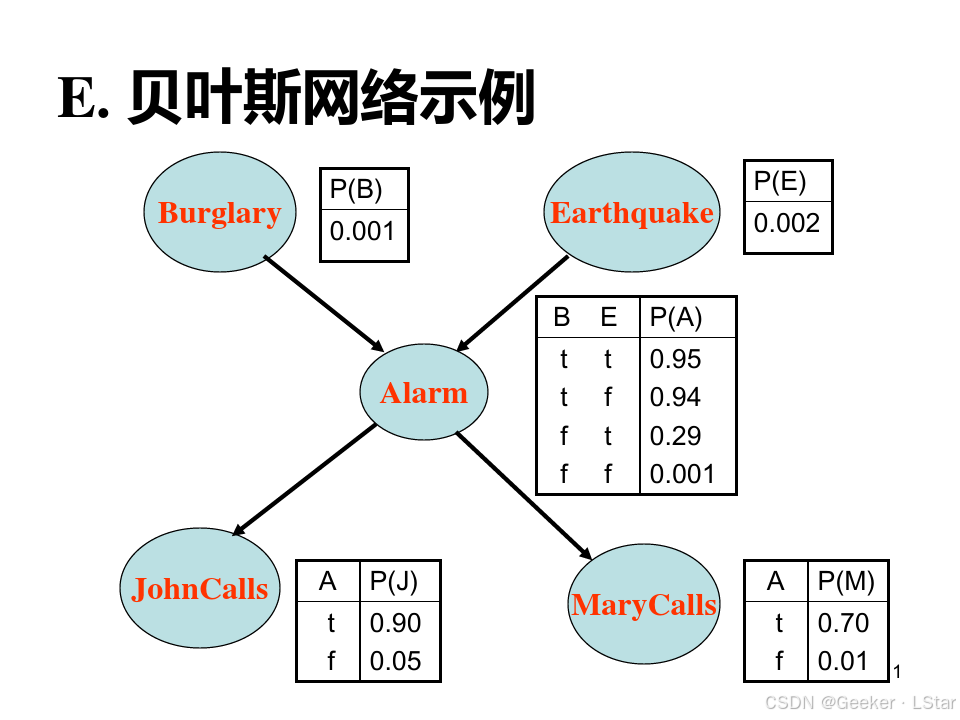
在这个图中,节点 A 的条件概率表表示的是,在父节点 B 和 F 取不同的值(tt/tf/ft/ff)的时候,A 发生的概率。节点 J 和 M 的 CPT 也是一个意思。
显然,CPT 是建立在条件独立性假设上的。
我们要学习的就是 CPT 中 P P P 列的值。即在父节点取特定值的时候,子节点取特定值(在上面的例子中就是为真)的概率。
注意,如果一个节点没有任何的父节点,那么我们学习的就是它的边缘概率,比如上图中的 B 和 E。
豪德()现在我们可以正式开始估计这些参数了。
完全数据:极大似然估计
嗷aooooo,经过前面那么多篇文章的洗礼,我想你对参数学习应该已经相当清楚了。
对于完全数据,也就是不含隐变量的数据,我们可以直接通过极大似然估计学习参数;而对于不完全数据,也就是含有隐变量的数据,我们需要通过 EM 算法,迭代式地求解参数。
如果你对极大似然估计(MLE)或 EM 算法还不了解,可以参考我之前的一些文章:
【初中生讲机器学习】12. 似然函数和极大似然估计:原理、应用与代码实现
【初中生讲机器学习】15. EM 算法一万字详解!一起来学!
我们先来看完全数据的情况,也就是使用极大似然估计的情况。
还是用上面那个例子:
按照极大似然估计的思想,我们的目的是什么呢,是找到让已有数据的出现概率最大的参数 θ \theta θ,即:
θ = arg min θ P ( D ∣ θ ) \theta = \argmin_\theta P(D|\theta) θ=θargminP(D∣θ)
其中 D D D 代表所有数据,共有 K K K 组,即 D = { ( f 1 , a 1 , s 1 , h 1 , n 1 ) , ( f 2 , a 2 , s 2 , h 2 , n 2 ) , . . . , ( f K , a K , s K , h K , n K ) } D=\{(f_1, a_1, s_1, h_1, n_1), (f_2, a_2, s_2, h_2, n_2), ... , (f_K, a_K, s_K, h_K, n_K)\} D={(f1,a1,s1,h1,n1),(f2,a2,s2,h2,n2),...,(fK,aK,sK,hK,nK)}
我们把这个式子展开,得到:
P ( D ∣ θ ) = ∏ k = 1 K P ( f k , a k , s k , h k , n k ) P(D|\theta)=\prod_{k=1}^{K} P\left(f_{k}, a_{k}, s_{k}, h_{k}, n_{k}\right) P(D∣θ)=k=1∏KP(fk,ak,sk,hk,nk)
根据条件独立性假设,我们可以简化这个式子:
P ( D ∣ θ ) = ∏ k = 1 K P ( f k ) P ( a k ) P ( s k ∣ f k a k ) P ( h k ∣ s k ) P ( n k ∣ s k ) P(D|\theta)=\prod_{k=1}^{K} P\left(f_{k}\right) P\left(a_{k}\right) P\left(s_{k}|f_{k} a_{k}\right) P\left(h_{k}|s_{k}\right) P\left(n_{k}|s_{k}\right) P(D∣θ)=k=1∏KP(fk)P(ak)P(sk∣fkak)P(hk∣sk)P(nk∣sk)
嗯,接下来把连乘变成连加:
log P ( D ∣ θ ) = ∑ k = 1 K log P ( f k ) + log P ( a k ) + log P ( s k ∣ f k a k ) + log P ( h k ∣ s k ) + log P ( n k ∣ s k ) \log P(D|\theta)=\sum_{k=1}^{K} \log P\left(f_{k}\right)+\log P\left(a_{k}\right)+\log P\left(s_{k}|f_{k} a_{k}\right)+\log P\left(h_{k}|s_{k}\right)+\log P\left(n_{k}|s_{k}\right) logP(D∣θ)=k=1∑KlogP(fk)+logP(ak)+logP(sk∣fkak)+logP(hk∣sk)+logP(nk∣sk)
豪德,现在比如我们要求当 F = i , A = j F=i, A=j F=i,A=j 的时候, S S S 出现(即 S = 1 S=1 S=1)的概率(回忆一下 CPT),我们只需要让极大似然函数对对应参数的偏导数为 0 就可以了,即:
我们要求:
θ s = 1 ∣ i j ≡ P ( S = 1 ∣ F = i , A = j ) \theta_{s=1|i j} \equiv P(S=1|F=i, A=j) θs=1∣ij≡P(S=1∣F=i,A=j)
求解式子为:
∂ log P ( D ∣ θ ) ∂ θ s = 1 ∣ i j = ∑ k = 1 K ∂ log P ( s k ∣ f k a k ) ∂ θ s = 1 ∣ i j \frac{\partial \log P(D|\theta)}{\partial \theta_{s=1|i j}}=\sum_{k=1}^{K} \frac{\partial \log P\left(s_{k}|f_{k} a_{k}\right)}{\partial \theta_{s=1|i j} } ∂θs=1∣ij∂logP(D∣θ)=k=1∑K∂θs=1∣ij∂logP(sk∣fkak)
解得:
θ s = 1 ∣ i j = ∑ k = 1 K δ ( f k = i , a k = j , s k = 1 ) ∑ k = 1 K δ ( f k = i , a k = j ) \theta_{s=1 \mid i j}=\frac{\sum_{k=1}^{K} \delta\left(f_{k}=i, a_{k}=j, s_{k}=1\right)}{\sum_{k=1}^{K} \delta\left(f_{k}=i, a_{k}=j\right)} θs=1∣ij=∑k=1Kδ(fk=i,ak=j)∑k=1Kδ(fk=i,ak=j,sk=1)
其中 δ \delta δ 是特征函数——在后面的特征成立的时候,函数取值为 1,否则取值为 0.
em,如果你对上述求解步骤中的任何一步有疑惑,不妨去看看极大似然估计那篇文章,那篇文章对每个步骤的原理都做了详细的解释。
嘿嘿,不难发现,条件独立性假设极大地简化了参数求解。
按照这套路子,我们可以求解出 CPT 中的任何一个条件概率。比如,我们把上面的式子进一步特殊化,得到:
θ s = 1 ∣ i = 1 , j = 0 = P ( S = 1 ∣ F = 1 , A = 0 ) \theta_{s=1|i=1, \ j=0} = P(S=1|F=1, A=0) θs=1∣i=1, j=0=P(S=1∣F=1,A=0)
解得:
θ s = 1 ∣ i = 1 , j = 0 = ∑ k = 1 K δ ( f k = 1 , a k = 0 , s k = 1 ) ∑ k = 1 K δ ( f k = 1 , a k = 0 ) \theta_{s=1 \mid i=1, \ j=0}=\frac{\sum_{k=1}^{K} \delta\left(f_{k}=1, a_{k}=0, s_{k}=1\right)}{\sum_{k=1}^{K} \delta\left(f_{k}=1, a_{k}=0\right)} θs=1∣i=1, j=0=∑k=1Kδ(fk=1,ak=0)∑k=1Kδ(fk=1,ak=0,sk=1)
这个式子表示的就是,当两个父节点 F F F 和 A A A 的取值分别为 1 和 0 的时候,子节点 S S S 取值为 1 的概率。
至此,我们已经完整地梳理了在完全数据的情况下,贝叶斯网络的参数学习方法。
其实就是普通的极大似然估计啦,只是 P ( D ∣ θ ) P(D|\theta) P(D∣θ) 会长一点,某些子节点依赖的父节点会多一些。但实际上整个思想是一样的。
en!! 接下来我们来看看,当数据中有隐变量的时候,又应该如何求解。
不完全数据:EM
呃呃呃()其实这部分也很简单。上一部分是直接套极大似然估计,这一部分是直接套 EM。
还是上面那个例子(绿色的图),但是,现在 S S S 无法被观测。
换言之,现在我们只能观测到 F 、 A 、 H 、 N F、A、H、N F、A、H、N,而没有办法观测到 S S S.
So,极大似然估计行不通了,我们需要用 EM 算法。
我们把所有可观测数据记作 X X X,把所有不可观测数据(隐变量)记作 Z Z Z.
按照 EM 算法的思想,我们首先通过上一轮迭代求出的参数估计隐藏变量 Z 的分布,然后利用估计得到的 Z 和已知的 X,求解这一轮的参数。EM 算法最终可以简化为最大化 Q 函数的问题,如下。
Q ( θ , θ ‾ ) = ∑ Z P ( X , Z ∣ θ ‾ ) log P ( X , Z ∣ θ ) Q(\theta, \overline{\theta}) = \sum_Z P(X, Z|\overline{\theta}) \log P(X, Z|\theta) Q(θ,θ)=Z∑P(X,Z∣θ)logP(X,Z∣θ)
其中 θ \theta θ 是上次迭代求出的参数(CPT 表中的值), θ \theta θ 是本次迭代待求的参数, X X X 是所有的观测数据, Z Z Z 是所有的隐变量。
嗯,至于这个 Q 函数是怎么来的,在 EM 算法那篇我们已经给出了详细的推导过程,在这里就不再重复推导了(EM 的推导过程简直太长了!!),直接使用结论。你可以在那篇文章中找到详细的推导过程。
至此,不完全数据构成的贝叶斯网络的参数学习也搞定啦!!我们可以进入到下一个 part——贝叶斯网络的结构学习。
贝叶斯网络的结构学习
还记得在参数学习部分最开始的时候,我们遗留的一个问题吗?——为什么先讲参数学习,再讲结构学习?
等看完这个 part 你就明白了,嘻嘻。
结构学习,顾名思义,学习贝叶斯网络的结构,也就是各个节点之间的依赖关系。
贝叶斯网络是有向图,所以依赖关系在这里有两层含义:
- 哪两个节点之间有边相连?
- 对于两个相连的节点,谁是父节点,谁是子节点?
你可能会想,呃,,,这么复杂,那我岂不是要把所有可能的依赖情况,从所有节点彼此独立(注意是独立而非条件独立),到所有节点两两之间都有边相连,全都考虑(暴力)一遍??而且还得考虑边的方向问题,这得花多少时间和计算资源啊…
weeeeell 显然,这种纯暴力的方法无论如何是行不通的。我们需要一些更为 heuristic 的方法…
接下来要讲的两种方法就是这样的!!
评分方法
首先是评分方法。
字面意思,它很好理解:每个结构都会有一个对应的评分,我们选择评分最高的结构。
那么,有两个关键问题:
- 怎么寻找结构?(前面说了,显然暴力是行不通的。。
- 使用什么样的评分准则(函数)?
well,要不在这里先给出答案吧。
对于第一个问题,评分方法使用贪心策略,一步一步迭代解决。
具体来说,我们会从一个全空(或全满)的图出发,在每一步(每一次迭代)都尝试以下三种操作。
1)增加一条边
2)删除一条已有边
3)调换一条已有边的顺序(父子节点互换)
通过这三种操作,我们可以得到很多的新网络结构。对于每种新网络结构,我们都计算它们的评分(具体评分函数是什么后面会说到)。然后,我们选出评分最高的网络结构,作为这一次迭代得到的新网络结构。
比如,我们现在有个完全空的图:
在第一步中,我们可以尝试在 AB 中添加边(A 指向 B 或 B 指向 A)、在 BC 中添加边(同上),等等。对于每一个添加边后得到的新网络,我们都计算它在评分函数上的得分,并选择评分最高的网络作为这一轮得到的网络。
比如说,添加 A 指向 B 的边,新网络的得分为 S 1 S_1 S1;添加 B 指向 C 的边,新网络的得分为 S 2 S_2 S2,…,如果在所有这些得分中, S 1 S_1 S1 最大,那么在这一步,我们就添加由 A 指向 B 的边,即:
这就是我们在第一次迭代(贪心)后得到的网络结构。
嗯,可以看到,在选择网络结构的时候,我们选择的是 “评分最高的结构”,但到现在为止,我们好像还没有说明这个评分具体是怎么做的。
(这是最开始说的第二个问题。
sooooo 让我们来看看第二个问题…
对于这个问题,通常有两种处理方法——可以直接使用似然函数(或 EM 函数,针对含有隐变量的问题)作为评分函数,也可以加入控制模型复杂度的项,使用贝叶斯信息准则(BIC 准则)作为评分函数。通常而言,为了避免模型过拟合,我们会使用 BIC 准则作为评分函数(类似于正则化项)。
但是注意,虽然贪心策略极大地降低了计算复杂度,但它经常会陷入局部最优解。换言之,贪心策略给出的网络结构不一定是最优的网络结构(或者说在大部分情况下,都不是最优的网络结构)。
在大多数情况下,精度和计算复杂度是无法兼得的。
如果使用极大似然估计,则最终式子如下,和我们在前面讲条件独立性的时候用到的式子一样:
L ( G ) = ∏ i = 1 n P ( X i ∣ Parents ( X i ) , θ ) L(G) = \prod_{i=1}^{n} P(X_i|\text{Parents}(X_i), \theta) L(G)=i=1∏nP(Xi∣Parents(Xi),θ)
其中 G G G 代表图结构,下同。
我们选择使得这个式子(似然函数)最大的结构作为这一轮迭代的结构。
使用 EM 也是类似的道理,也和我们在参数学习中说到的式子是一样,即:
Q ( θ , θ ‾ ) = ∑ Z P ( X , Z ∣ θ ‾ ) log P ( X , Z ∣ θ ) Q(\theta, \overline{\theta}) = \sum_Z P(X, Z|\overline{\theta}) \log P(X, Z|\theta) Q(θ,θ)=Z∑P(X,Z∣θ)logP(X,Z∣θ)
其中 X X X 是观测变量, Z Z Z 是隐变量。
然后我们来说说 BIC 信息准则。
在实际情况中,如果只使用似然函数或 EM 函数作为评分函数,模型大概率会过拟合。因为模型为了提高评分,会倾向于学习更多的依赖,把很多实际上没有关系的节点也连起来。这会导致对数据的过度解释。
这可不是我们想看到的。
so,我们需要在评分函数中加入一个专门评判模型复杂度的项,这个项会和似然函数项互相制衡。如果模型想在整个评分函数(而不是仅仅在似然函数上)取得最大值,就必须不能让这个项太大,也就是说,必须得控制结构的复杂性。
BIC 的公式如下:
BIC ( G ) = − 2 log L ( G ) + k log ( n ) \text{BIC}(G) = -2 \log L(G) + k \log(n) BIC(G)=−2logL(G)+klog(n)
其中, L ( G ) L(G) L(G) 是似然函数项, n n n 代表模型的参数数量,系数 k k k 用于调整前后两部分的重要程度( k k k 大,说明更看重结构的复杂程度, k k k 小,说明更看重似然函数值,也就是对数据的拟合程度)。在实际任务中, k k k 可以通过交叉验证得到。
我们的目标就是找到使得 BIC 最小的模型结构。
另外,有必要说明一下 BIC 和正则化的区别(我发现前面我一直在说它们很相似,但其实它们之间也有显著的不同)。
BIC 常用在模型(结构)选择,我们对比不同模型结构的 BIC,选出 BIC 值最大的结构;而正则化常用在模型训练的过程中,
简言之,BIC 用于多个模型的对比和选择,而正则化用在一个模型训练的过程中,控制模型的复杂度。
ok,简单总结,评分方法使用贪心算法寻找网络结构,并从似然函数值(拟合程度)和网络复杂度两个方面对网络结构进行评估。
现在可以解释我在前面卖的关子了(嘻嘻)。之所以先讲参数学习而非结构学习,是因为在结构学习的过程中,对于每种结构,我们都需要先学习出它的参数,再根据参数对应的似然函数值和复杂度计算出评分函数。相当于,在进行结构学习的时候,已经包含了参数学习。
换言之,对于一个未知结构的网络,结构学习和参数学习是交替进行的。对于任何一个可能的结构,我们都需要学习它的参数,根据参数计算它的评分,选择评分最高的结构,再在这个新结构的基础上进行下一轮迭代…
en!! 以上就是评分方法的基本思想和的计算流程,可以看到其实没有太多数学公式,还是比较友好的,嘿嘿。
除了评分方法,还有一种方法——约束方法,也经常用于贝叶斯网络的结构学习。
我们接下来来看看约束方法吧!
约束方法
约束方法,这个名字就不像评分方法那么好理解了。约束,约束的是什么?
well,还是开门见山。在这里,约束是指对条件独立性的约束。
约束方法有很多,其中最有代表性的是 PC 算法(Peter-Clark 算法)。
先大致概括一下 PC 算法的流程。
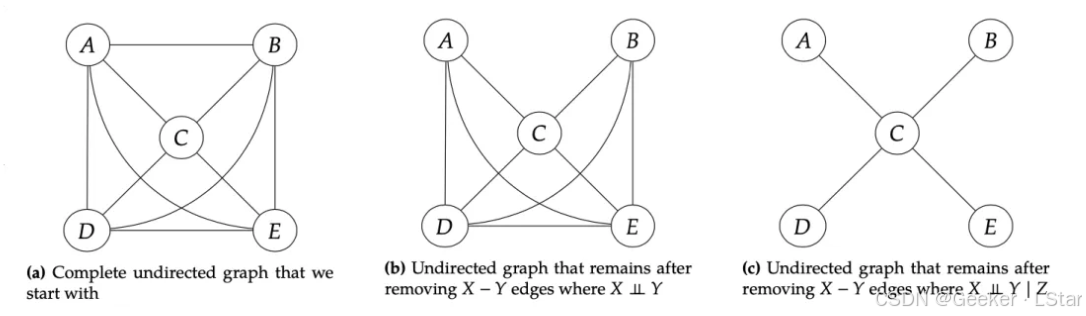
PC 算法从一个完全图(即每两个节点之间都有边相连的无向图)开始,利用数学上判断条件独立性的方法,比如卡方检验、fisher 精确检验等,判断两个变量是否(条件)独立。对于那些条件独立的变量,移除它们之间的边。当没有边可以移除的时候,我们就得到了最终的图结构。
啊啊啊好吧,这么一大坨好像并不是很清晰…我们还是一步步来看吧。
首先,我们从一个完全图,即图中每个节点之间都有边的无向图开始。如下左图所示。
(注意开始的时候是无向图o,具体怎么把无向图变成有向图后面会说~
我们设定一个条件集合 S S S,最开始 S S S 为空, S S S 是干什么的你很快就会知道。
well,下面进行第一步——独立性检验。
在这一步,我们不给定任何变量,而是单纯判断这些节点两两之间的独立性,对于那些彼此独立的节点,我们移除它们之间的边。这个过程对应于上中图。
嗯,现在,那些本身就独立的变量之间的连接被去除了,我们得到了新的图结构,它相比于完全图应该已经有了很大程度的简化。
现在,我们在 S S S 中添加一个变量,比如 Z Z Z。
然后,对于图中剩下的所有有边相连的节点,我们都判断它们在给定 Z Z Z 的情况下是否是条件独立的。如果条件独立,则移除它们之间的边。这个过程对应于上右图。
接下来,我们再向 S S S 中添加一个变量,比如 W W W。
同样的,对于图中所有有边相连的节点,我们都判断它们在给定 Z Z Z 和 W W W 的情况下是否是条件独立的。如果条件独立,则移除它们之间的边。
就这么以此类推下去,直到没有任何的边可以删除,或 S S S 中的元素个数达到最大。
嗯,这就是约束方法的大致流程,你可能发现,诶好像并没有说明具体怎么判断独立性或条件独立性诶???
weeeeeell,这涉及到卡方检验和条件卡方检验,由于内容很多(而且包含很多的数学,,),所以我会单独开一篇文章来讲,又开新坑了啊哈哈哈哈哈(转圈圈((
ennn,约束方法其实并不复杂,概括一下就是不断扩大条件集,判断在当前条件集的情况下图中变量的条件独立情况。 对于那些在给定条件集后条件独立的变量,我们删除它们之间的边。
豪德,下面我们进入下一个话题——到目前为止,PC 算法处理的一直是无向图,但是,在贝叶斯网络中,我们最终需要得到一个有向图——这怎么办呀?
well,为了更好地回答这个问题,我们需要先复习一下 D 分隔的三种情况。
还是按照我们之前的顺序,下图从左到右依次是第 1-3 种情况。
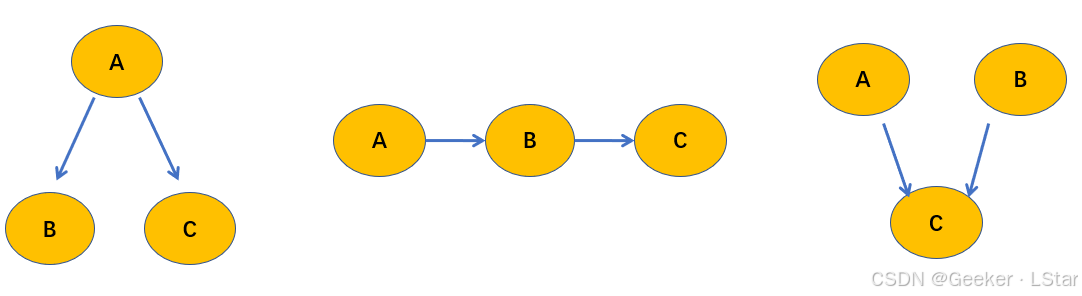
对于第一种情况,给定 A(中间节点)的时候,B 和 C 条件独立;不给定 A 的时候,B 和 C 非条件独立。
对于第二种情况,给定 B(中间节点)的时候,A 和 C 条件独立;不给定 B 的时候,A 和 C 非条件独立。
对于第三种情况,给定 C(中间节点)的时候,A 和 B 非条件独立;不给定 C 的时候,A 和 B 条件独立。
诶你发现了什么,第一种情况和第二种情况的叙述完全一样诶,,,这说明,我们没有办法区分第一种和第二种情况,我们唯一能够判定的就是第三种情况。
所以,对于使用约束方法后剩下的所有边,我们都判断它们是否属于第三种情况,这可以帮我们确定一些边的方向。
具体来讲,如果在给定一个节点的情况下,其它两个和它直接相连节点的非条件独立;但在不给定这个节点的情况下,其它两个和它相连的节点条件独立,那么,其它两个节点就是这个节点的父节点,即 D 分隔三种情况中的 head-to-head.
那么,对于其它不确定方向的边,怎么办?
eerrr 这就只能继续用类似于评分方法的启发式方法啦()具体做法和评分方法非常类似,这里不再赘述。
好耶,讲完约束方法(PC 算法),我们把它和评分方法做一个小小的对比。
评分方法完全基于启发式方法来选择结构,(虽然比暴力遍历所有结构要好一些,但)它需要搜索大量可能的结构,并对每一个结构都计算评分,这导致它比较耗时。不过它学习出的网络通常性能较好,虽然这个结构可能在一定程度上缺乏数学解释性。
约束方法和评分方法几乎相反,它使用严格的数学方法来选择结构,这保证了它学习出的结果的可解释性,但这同时导致了它对数据数量和数据质量有着更高的要求(或者说更为敏感),这导致它更难学习出 robust 的网络结构(因为基于独立性检验的方法很容易受到数据噪声的影响)。
嗯!!那上面就是贝叶斯网络结构学习的两种主要方法啦~
现在我们已经讲完了贝叶斯网络的参数学习和结构学习,但是你有没有发现,诶它好像有那么些局限性…?
动态贝叶斯网络
在前面的内容中,我们考虑了多个变量之间的依赖关系。但是,你有没有想过,有些时候这些依赖关系并不是一成不变的诶,它们完全可能随着时间的变化而变化。
对于这种情况,前面讲的(静态)贝叶斯网络就不能很好地处理了,因为它没有把时间考虑进去。
我们需要在原始贝叶斯网络的基础上,把时间维度引入进来。大概思路如下图所示,即,每个节点的状态(取值)不仅与这个时间步的其它节点有关,也和上一个时间步的一些节点有关。
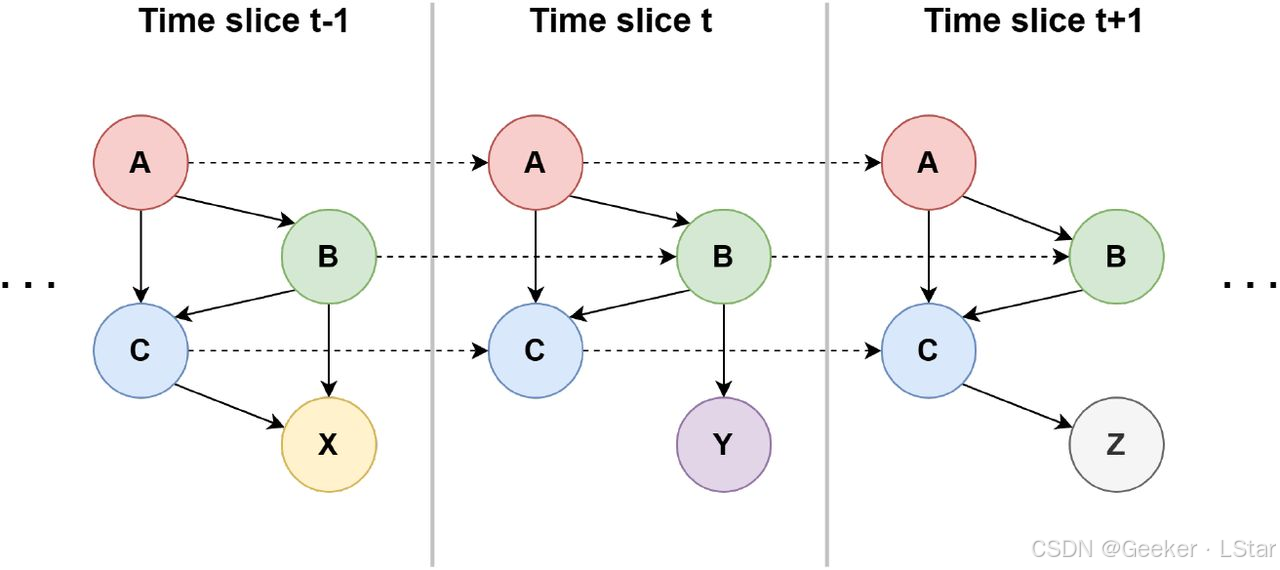
这种将时间纳入考虑的贝叶斯网络,就被称为动态贝叶斯网络,英文简称 DBN。
动态贝叶斯网络的参数学习和结构学习和贝叶斯网络是一样的,因为它其实只是多了一个依赖——后一个时间步的某变量对前一个时间步的一些(或一个)变量的依赖。在这里就不再展开单说了。
特例:隐马尔可夫模型
嗯!!隐马尔可夫模型(HMM)是动态贝叶斯网络的一个特例,它的结构如下所示:
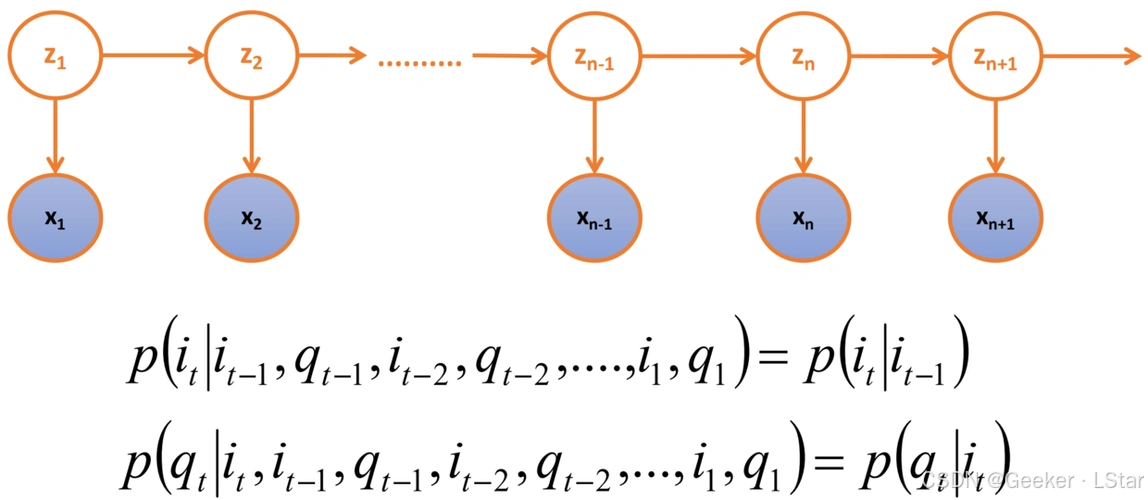
其中上层(Z)代表隐藏的状态序列,下层(X)代表观测序列。可以看到,每个时间步的隐藏状态都依赖于前一个时间步的隐藏状态,同时每个时间步的隐藏状态又会影响这个时间步的观测。HMM 是一个典型的动态贝叶斯网络。
ennmmm 不过,其实在写这篇之前,我就已经写过 HMM 的详细讲解啦,所以 HMM 的相关内容就不在这里展开了。下面是 HMM 详解的 link!:
【高中生讲机器学习】20. 隐马尔可夫模型好难?看过来!(上篇)
【高中生讲机器学习】21. 隐马尔可夫模型好难?看过来!(下篇)
可以进一步看一看 HMM!会让你对贝叶斯网络和动态贝叶斯网络都有更实例化的理解~
哇!!那我们这一篇的所有内容就讲完了耶!!
嘿嘿嘿,那这一篇就到这里啦~~我们下一篇再见!下一篇可能会讲概率图模型家族的另一大部分——马尔可夫模型!keep fooooollow!
这篇文章系统地贝叶斯网络,包括贝叶斯网络的条件独立性、参数学习和结构学习等,希望对你有所帮助!⭐
欢迎三连!!一起加油!🎇
——Geeker_LStar

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 24
24 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)