自动驾驶中的传感器技术19——Camera(10)
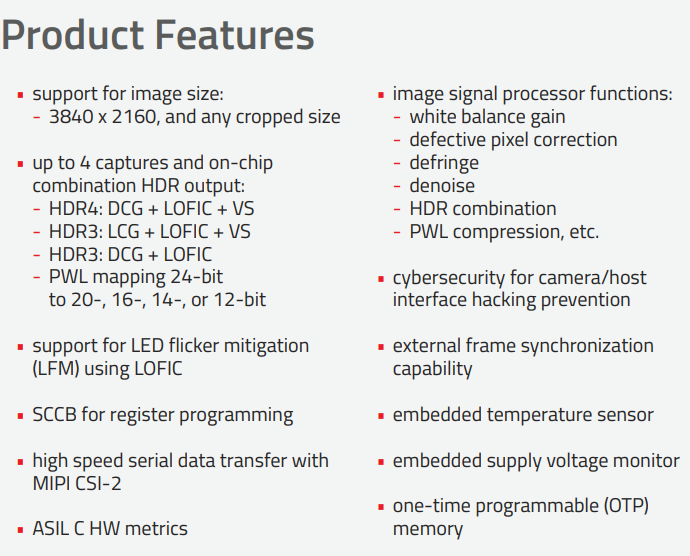
本文分析了自动驾驶摄像头图传的数据率计算方法,重点讨论了行消隐(Horizontal Blanking)和场消隐(Vertical Blanking)的概念。研究指出Bit per pixel(BPP)未采用标准24位的原因在于CIS(CMOS图像传感器)采用了PWL压缩技术输出图像。文中通过X8D10产品特点的图示和PWL压缩示意图,解释了这种压缩技术对数据传输效率的优化作用,为自动驾驶视觉系统
·
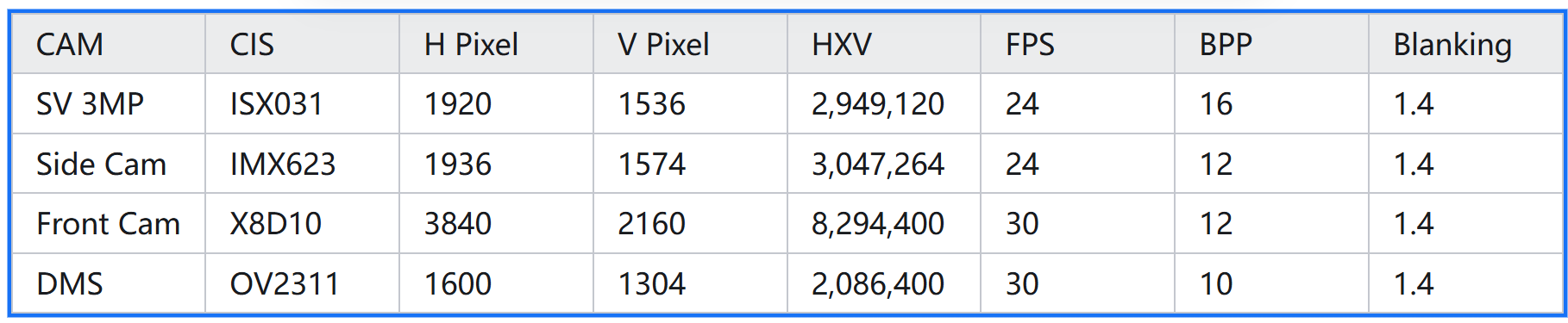
自动驾驶摄像头图传的数据率计算案例
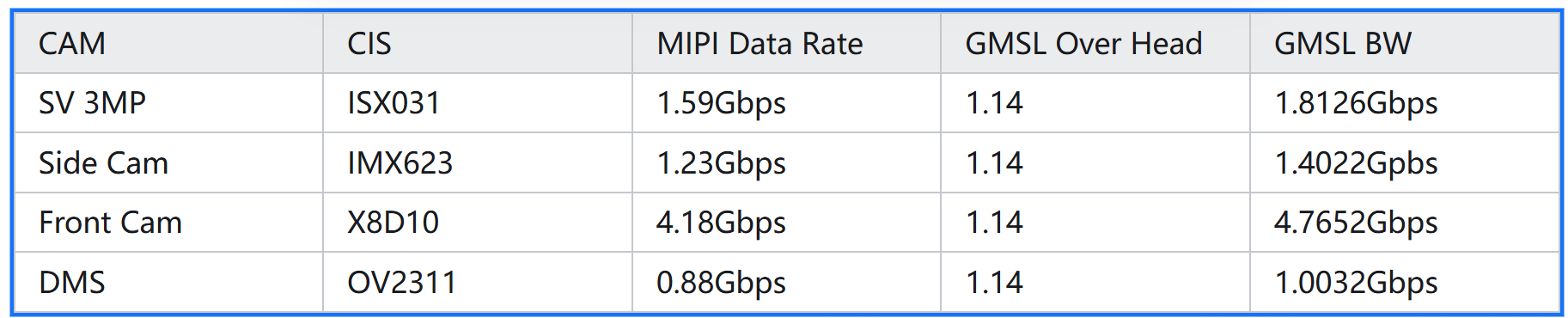
HPixel*VPixel*FPS*BPP*Blanking=MIPI data rate
HPixel*VPixel*FPS*BPP*Blanking*GMSLoverhear=GMSL BW
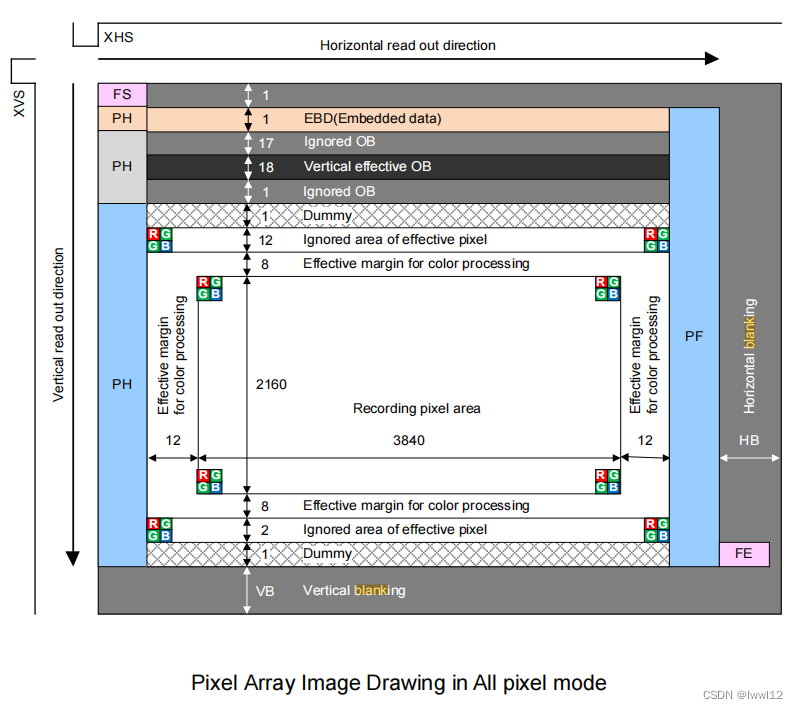
Horizontal Blanking:行消隐或者水平消隐,两行之间的间隔。
Vertical Blanking:场消隐或者垂直消隐,从上一帧到下一帧的间隔。
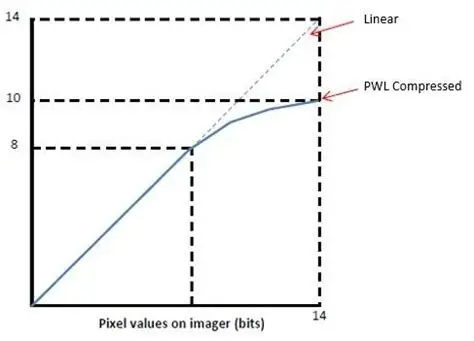
以上有疑问的是BPP,为什么Bit per pixel不是24,是由于CIS采用了PWL Compression 后才输出的,另外注意,RAW和RGB的BPP是不同的。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 14
14 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)