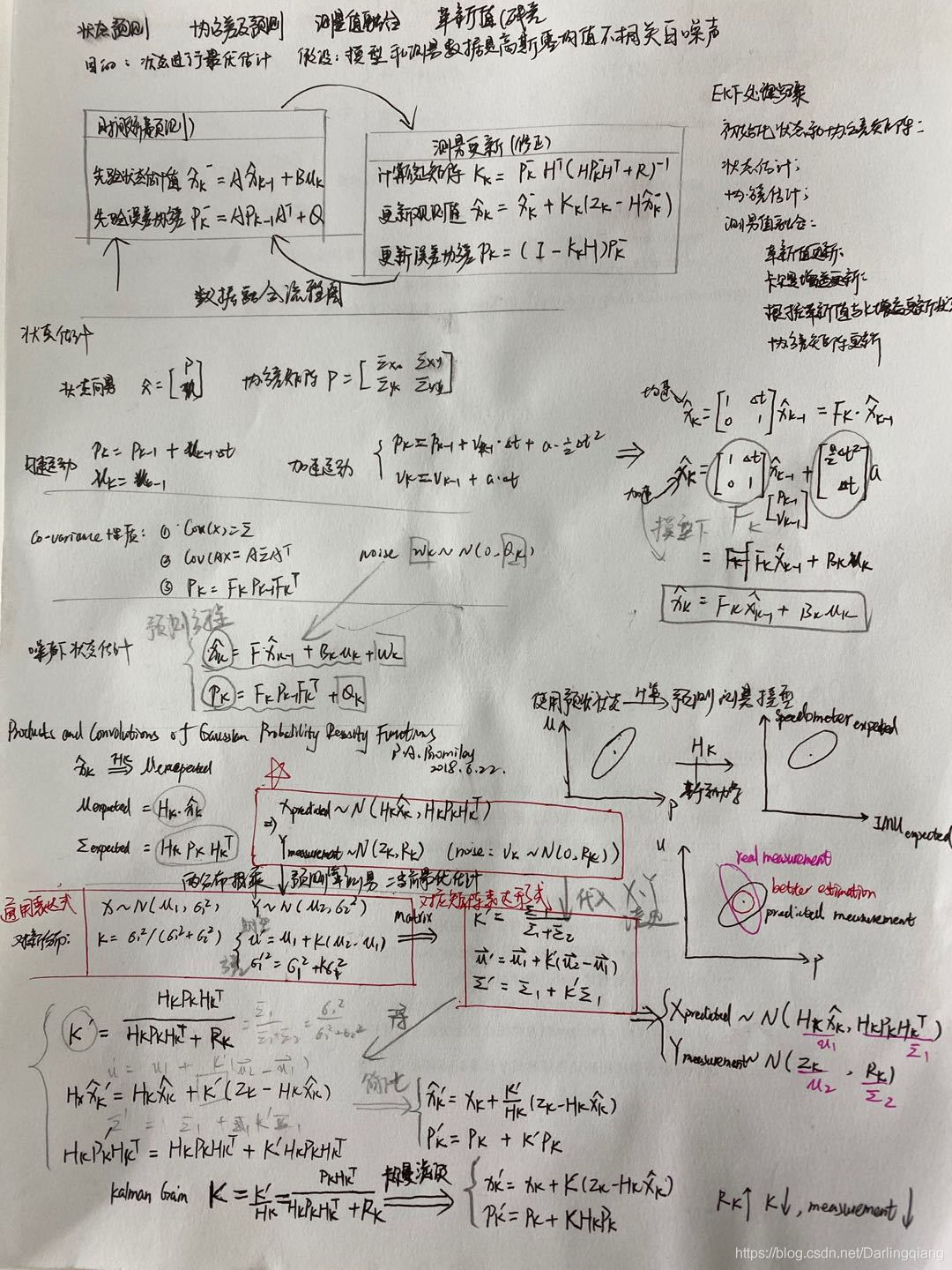
多传感器融合之滤波(一)——卡尔曼滤波(KF)推导
卡尔曼滤波本质上是一个数据融合算法,将具有同样测量目的、来自不同传感器、(可能) 具有不同单位 (unit) 的数据融合在一起,得到一个更精确的目的测量值。卡尔曼滤波的局限性在于其只能拟合线性高斯系统。但其最大的优点在于计算量小,能够利用前一时刻的状态(和可能的测量值)来得到当前时刻下的状态的最优估计。...
·
c参考资料:https://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/
卡尔曼滤波本质上是一个数据融合算法,将具有同样测量目的、来自不同传感器、(可能) 具有不同单位 (unit) 的数据融合在一起,得到一个更精确的目的测量值。
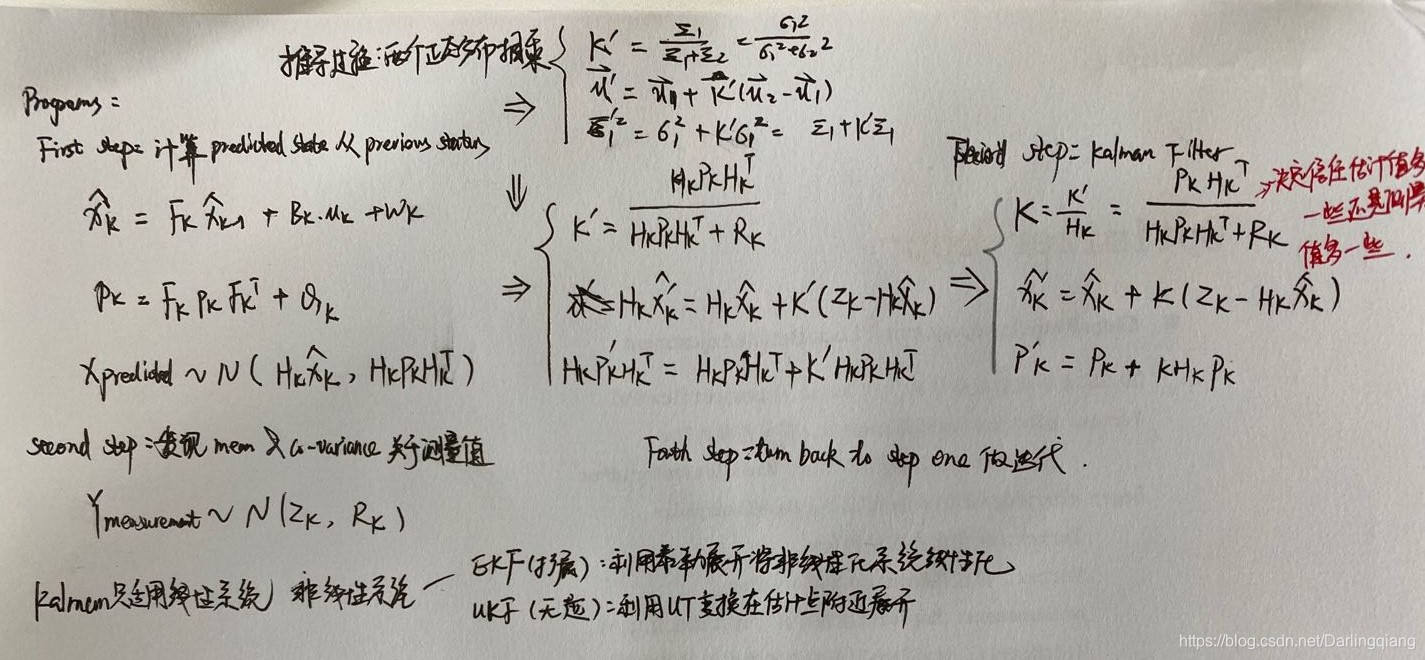
卡尔曼滤波的局限性在于其只能拟合线性高斯系统。但其最大的优点在于计算量小,能够利用前一时刻的状态(和可能的测量值)来得到当前时刻下的状态的最优估计。
EKF扩展卡尔曼滤波适用于非线性高斯模型。
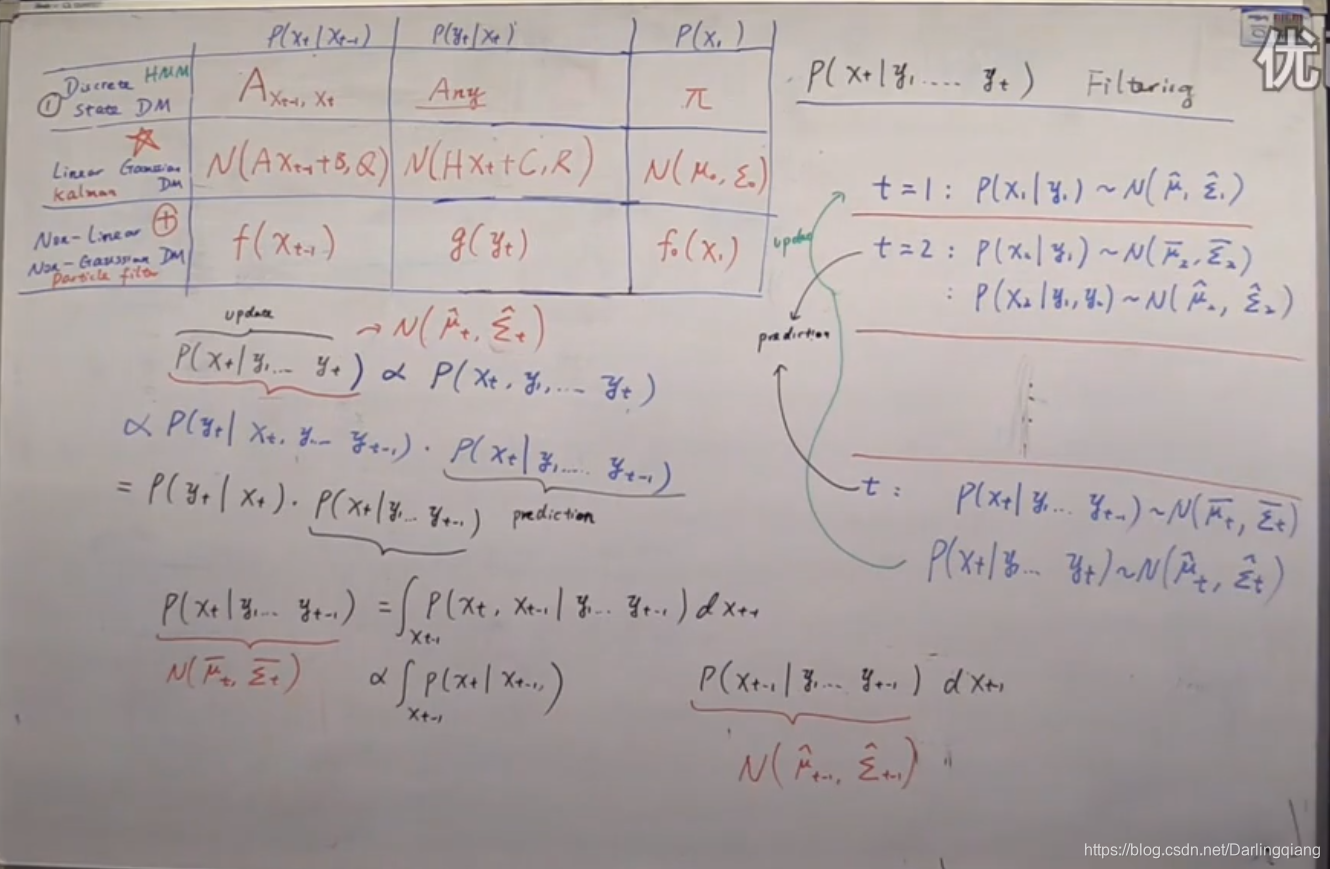
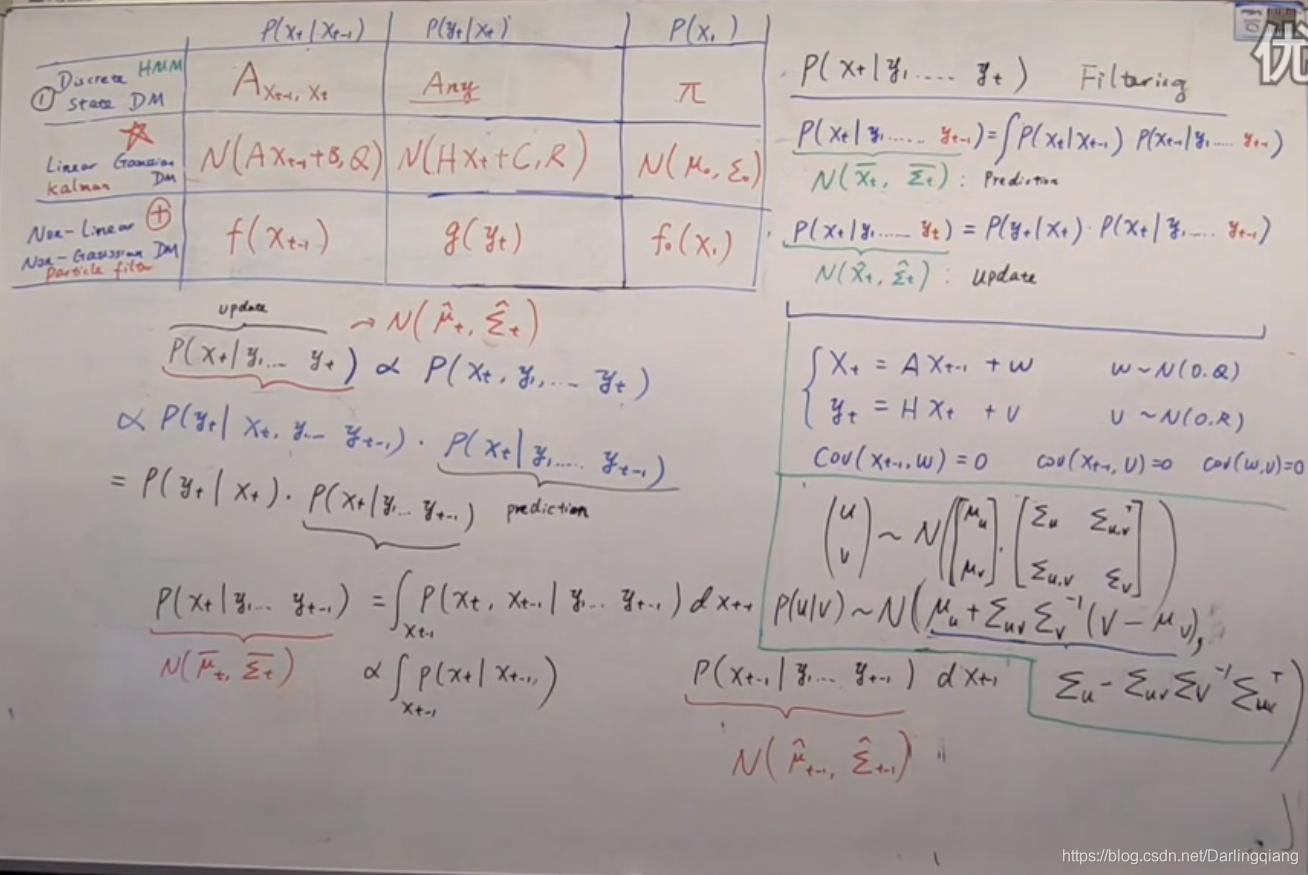
徐老师阐述原理记录:

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 0
0 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)