windows 编译 open3d 下
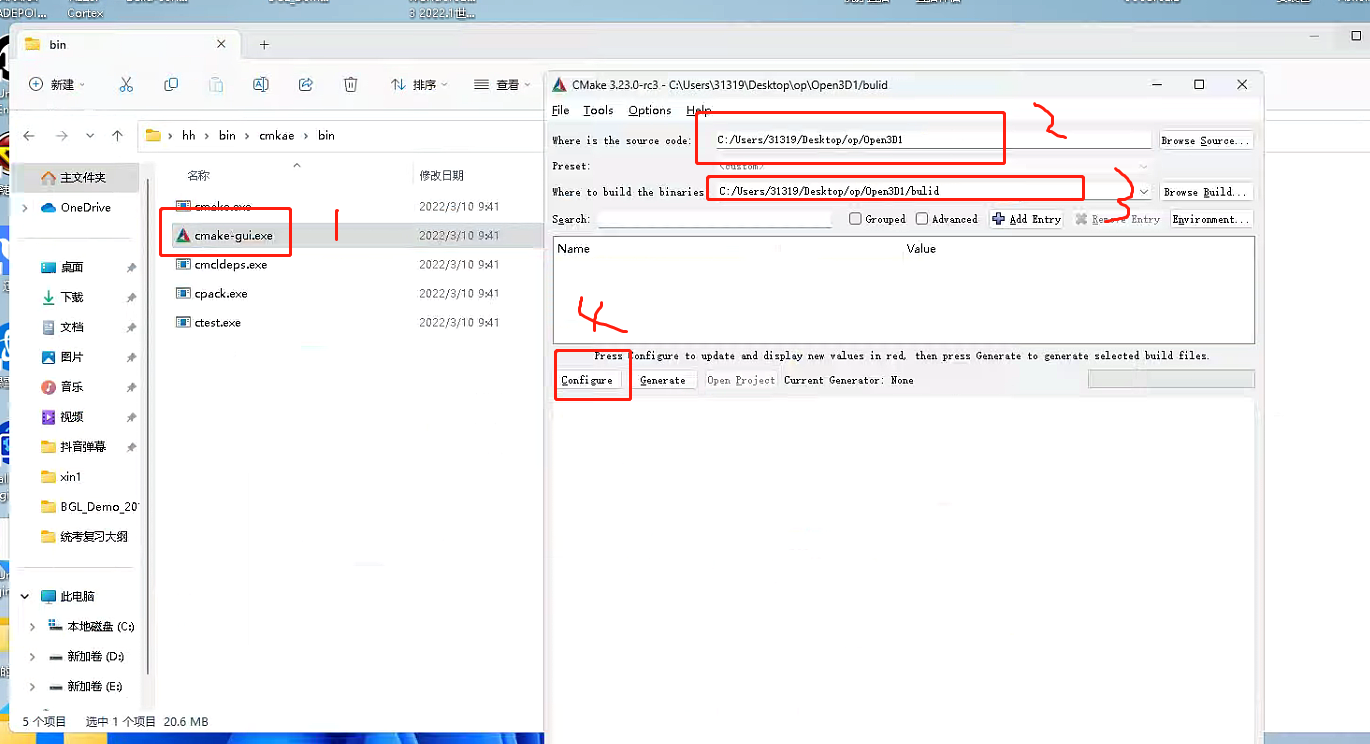
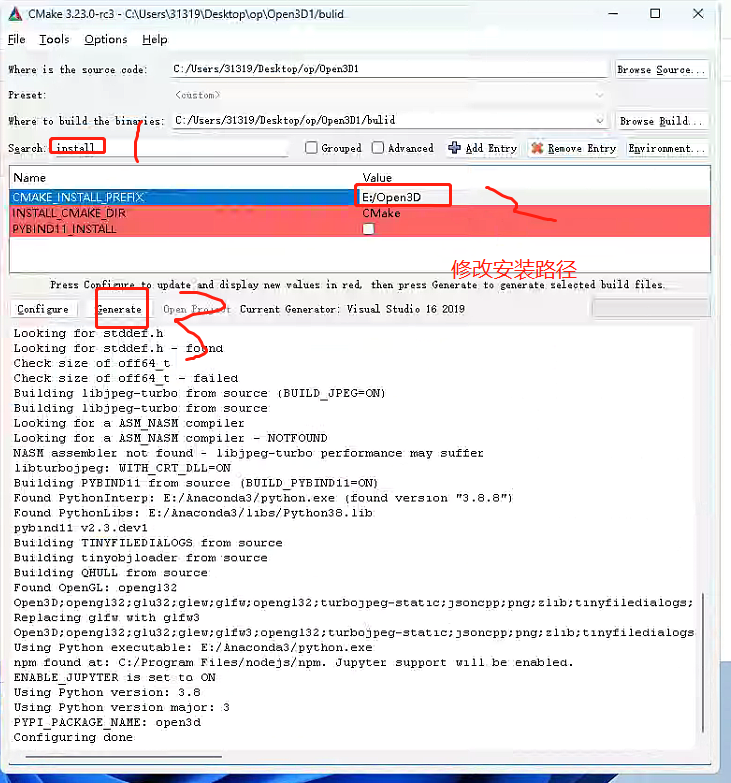
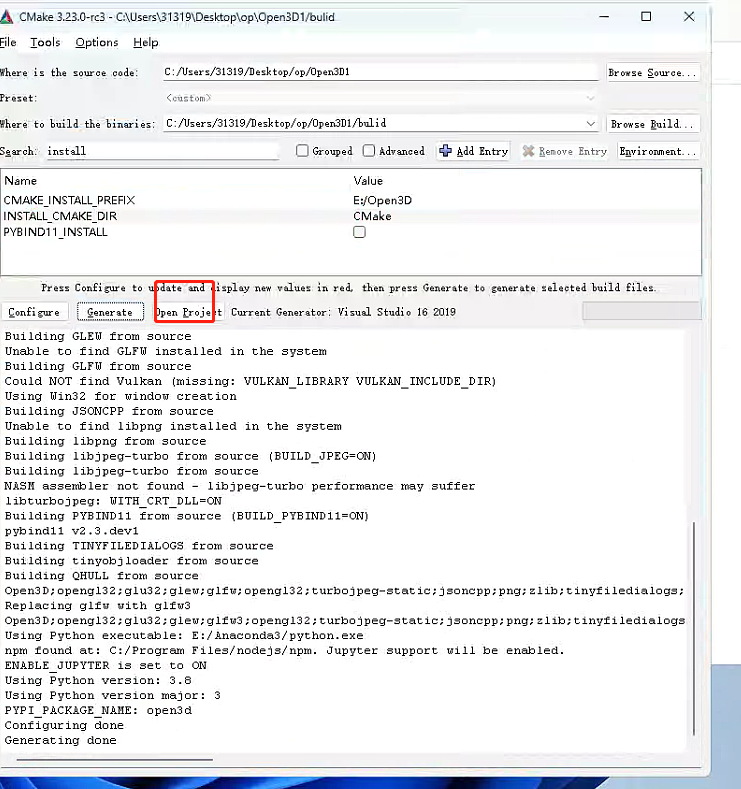
开始配置cmake那时候选的路径。--来自百度网盘超级会员V4的分享。--来自百度网盘超级会员V4的分享。
·
1.安装cmake
快速通道:
链接:https://pan.baidu.com/s/1gZYAlGRRj4UVGgaTBaZXjg?pwd=1klo
提取码:1klo
--来自百度网盘超级会员V4的分享
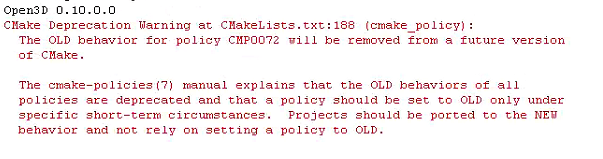
警告不用管
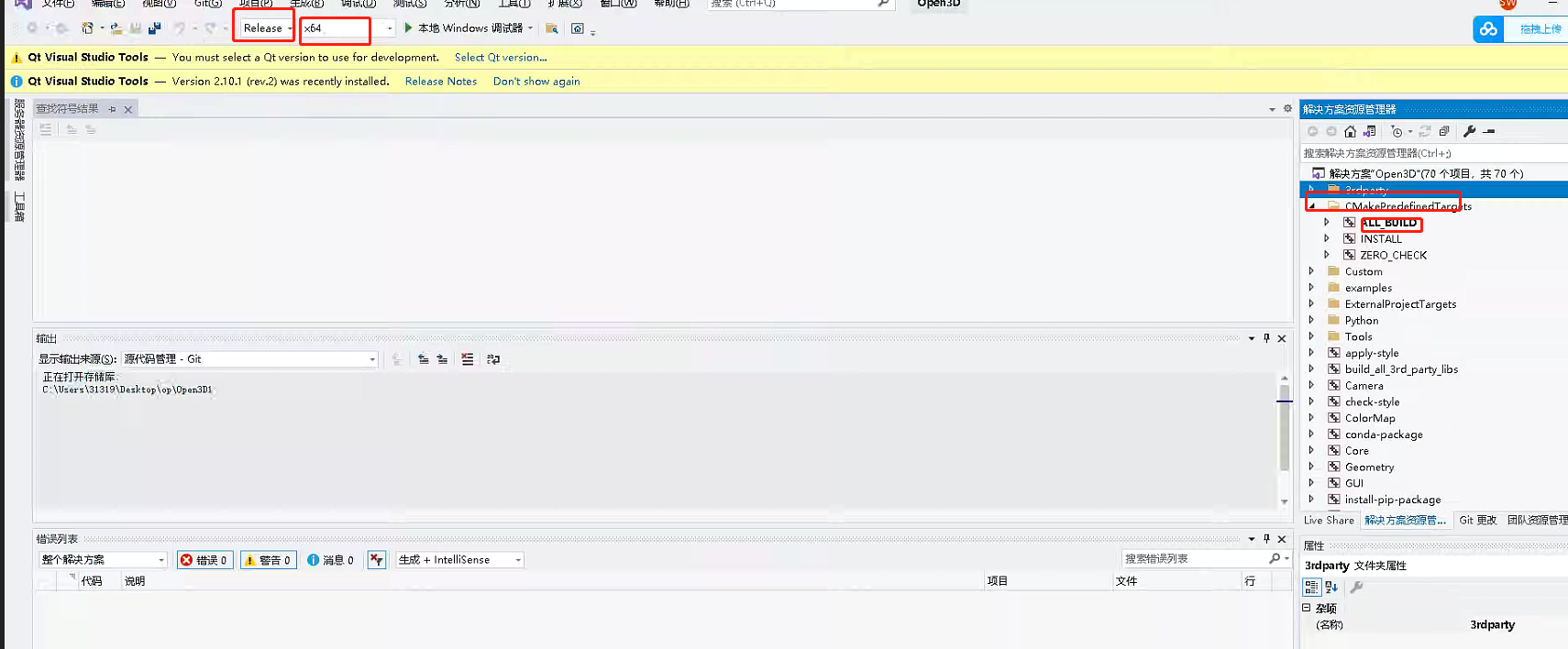
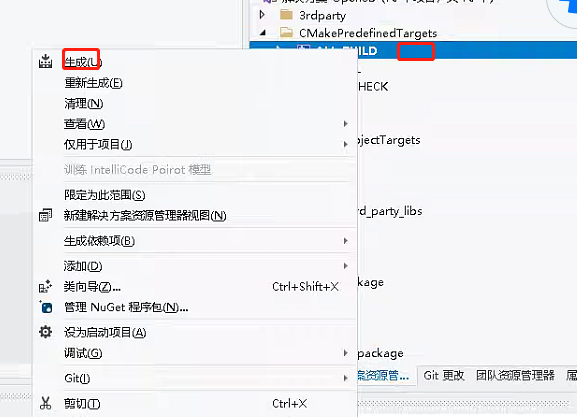
编译中
成功就是61
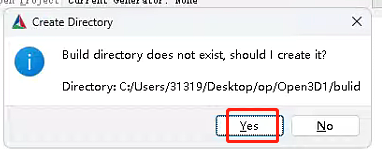
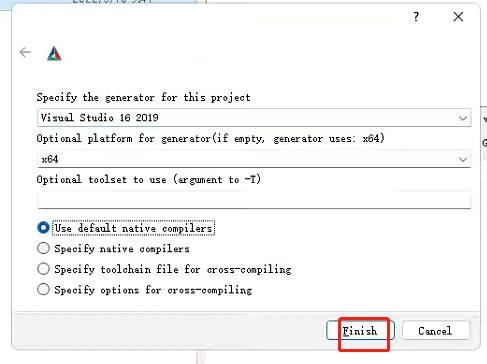
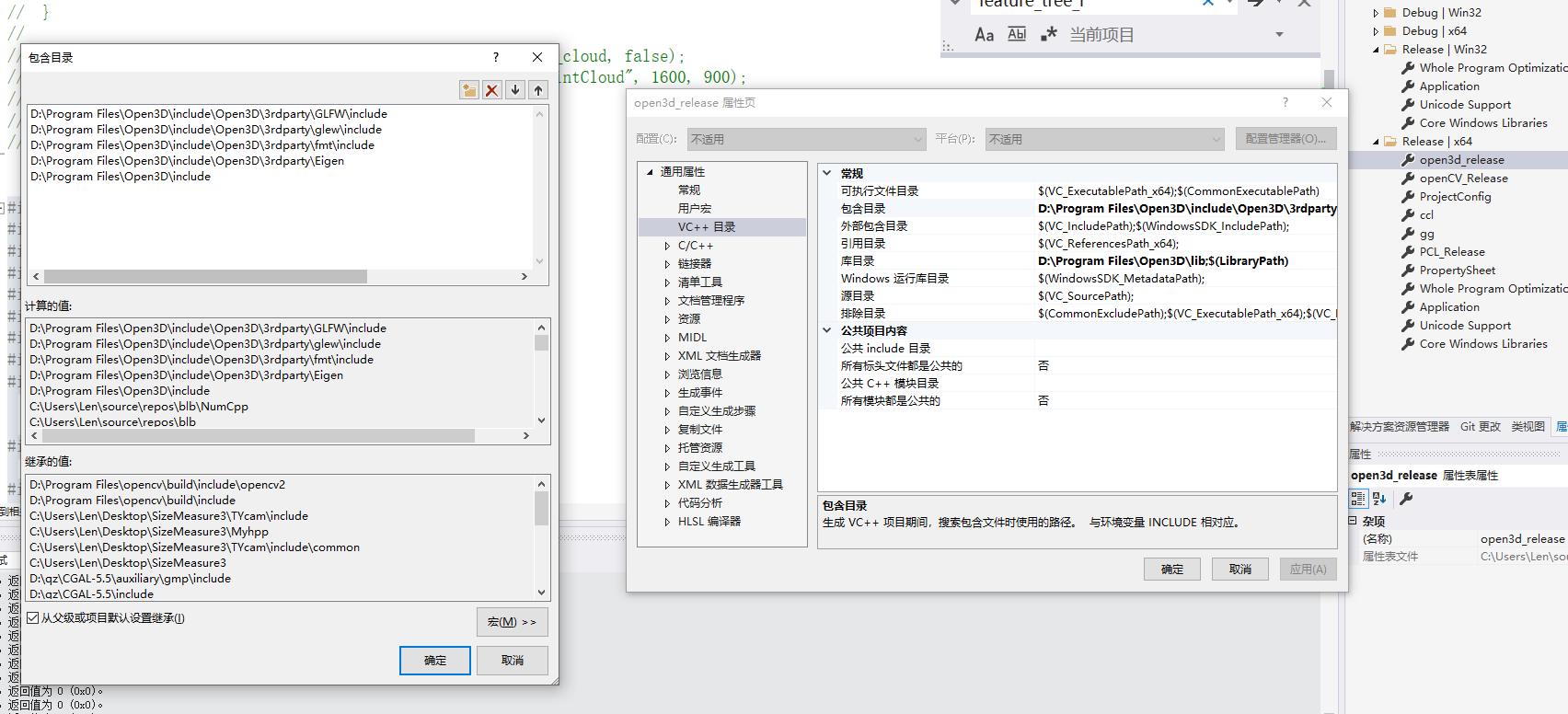
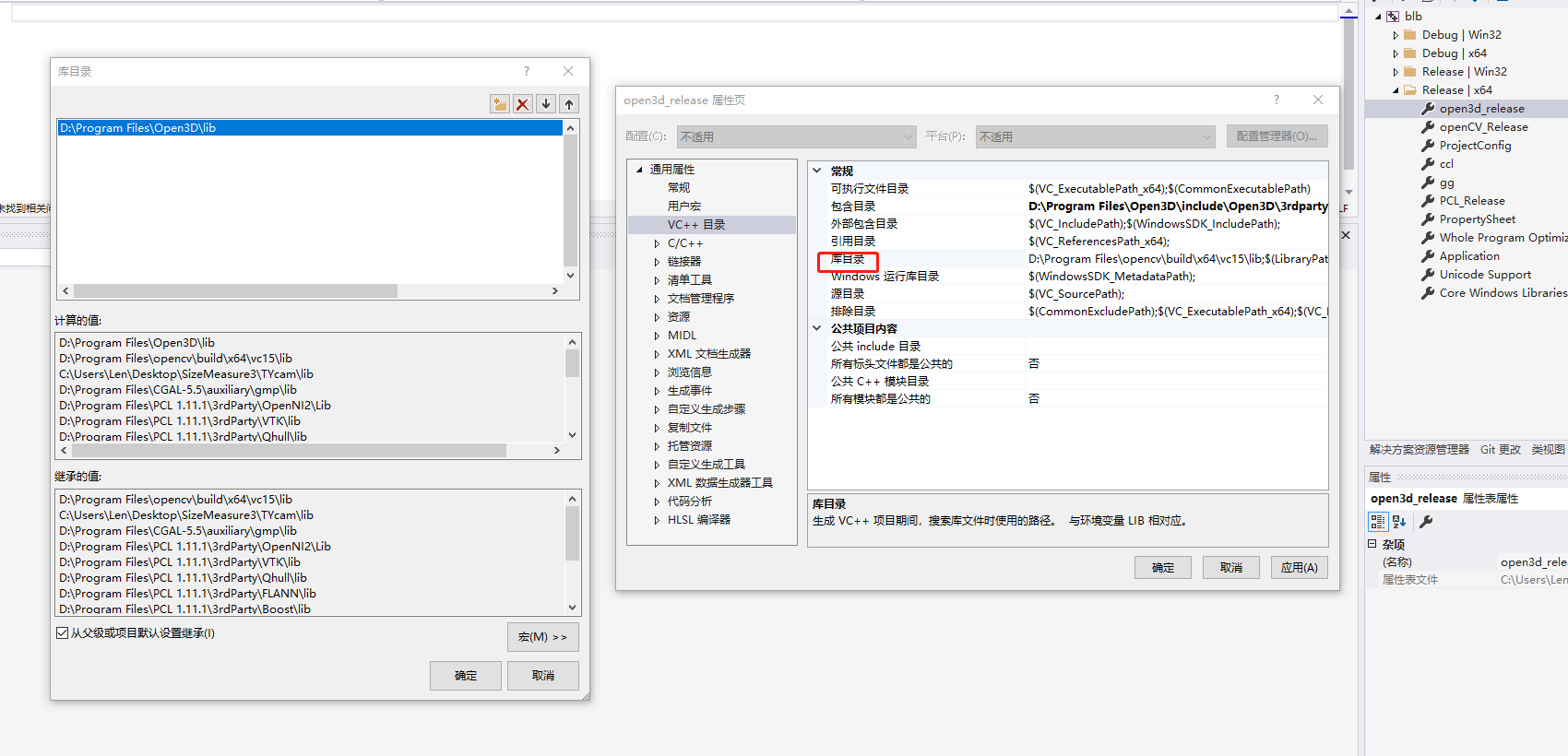
开始配置 cmake 那时候选的路径
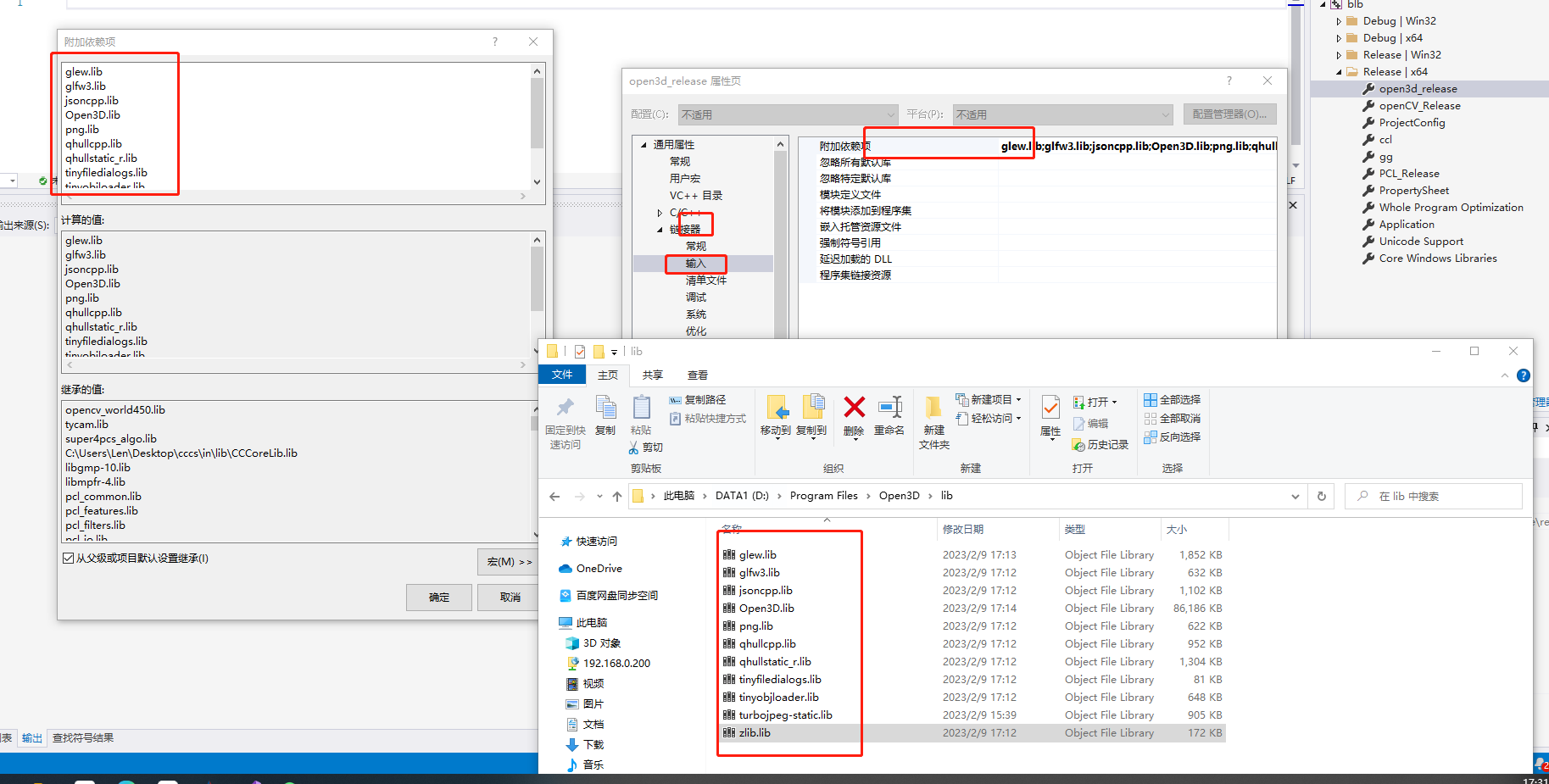
glew.lib
glfw3.lib
jsoncpp.lib
Open3D.lib
png.lib
qhullcpp.lib
qhullstatic_r.lib
tinyfiledialogs.lib
tinyobjloader.lib
turbojpeg-static.lib
zlib.lib
OpenGL32.lib
#include <iostream>
#include <random>
#include <Open3D/Open3D.h>
using namespace std;
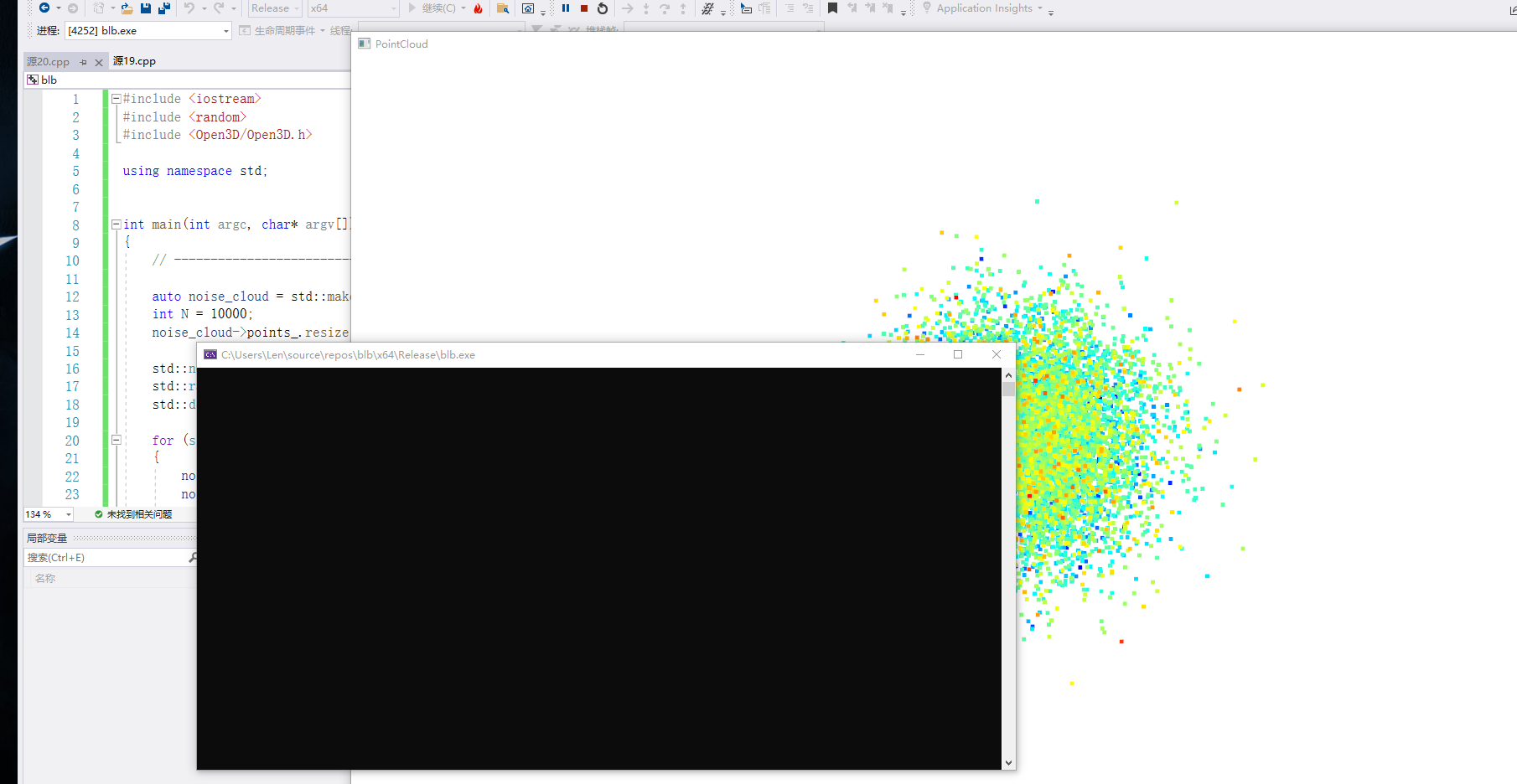
int main(int argc, char* argv[])
{
// -------------------------生成点云-----------------------------
auto noise_cloud = std::make_shared<open3d::geometry::PointCloud>();
int N = 10000;
noise_cloud->points_.resize(N);
std::normal_distribution<> norm{ 0, 0.002 };
std::random_device rd;
std::default_random_engine rng{ rd() };
for (size_t i = 0; i < N; ++i)
{
noise_cloud->points_[i][0] = norm(rng);
noise_cloud->points_[i][1] = norm(rng);
noise_cloud->points_[i][2] = norm(rng);
}
open3d::io::WritePointCloudToPCD("Gaiss_noise.pcd", *noise_cloud, false);
open3d::visualization::DrawGeometries({ noise_cloud }, "PointCloud", 1600, 900);
return 0;
}
快速通道:
链接:https://pan.baidu.com/s/1BnIJEaCKa_gGj37iRJkzsA?pwd=2ov2
提取码:2ov2
--来自百度网盘超级会员V4的分享

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)