人工智能:一种现代方法学习笔记——第十章经典规划
第十章考虑 完全可观察的, 确定性的, 静态的, 单Agent的用一组变量表示世界一个状态的表示方法称为要素化表示,可以使用PDDL语言进行描述PDDL: planning domain definition language
·
第十章考虑 完全可观察的, 确定性的, 静态的, 单Agent的
第十一章是复杂规划
用一组变量表示世界一个状态的表示方法称为要素化表示,可以使用PDDL语言进行描述
PDDL: planning domain definition language
PDDL根据什么发生了变化来描述一个动作的变化结果








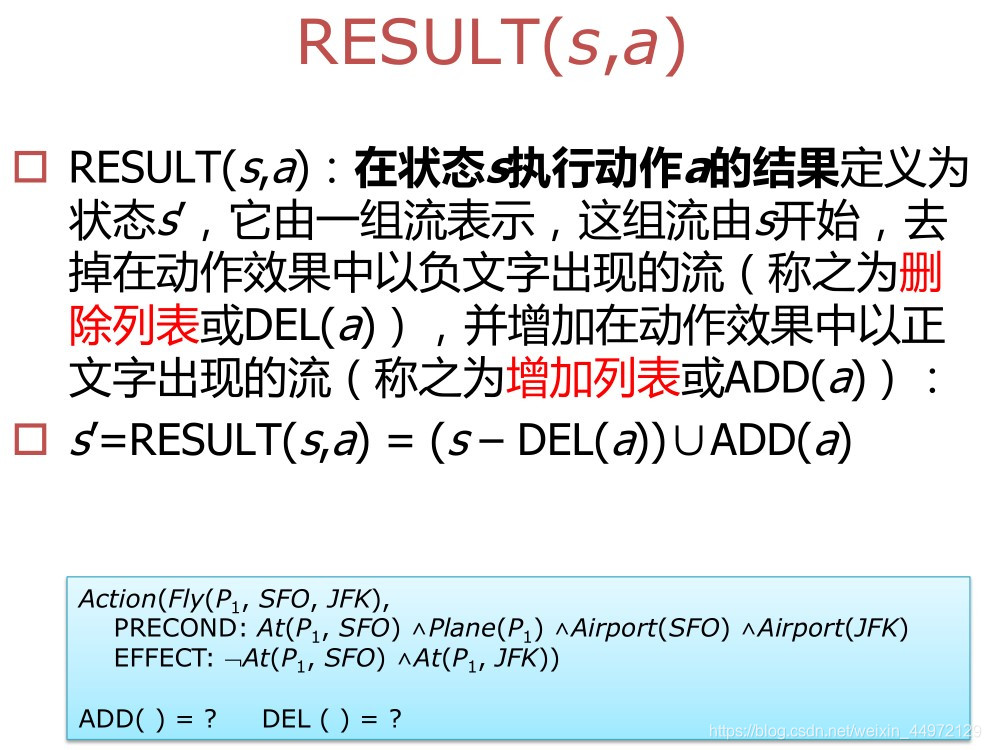


获得规划问题的启发式:
- 忽略前提启发式(去掉所有前提,那么所有动作都可以使用)
- 去掉负文字(忽略删除列表启发式)
- 去掉一些流(状态抽象)
- 分解,分解成子问题,子目标独立性








规划图
规划图只能用于命题规划——即没有变量的规划问题
蛋糕问题规划图
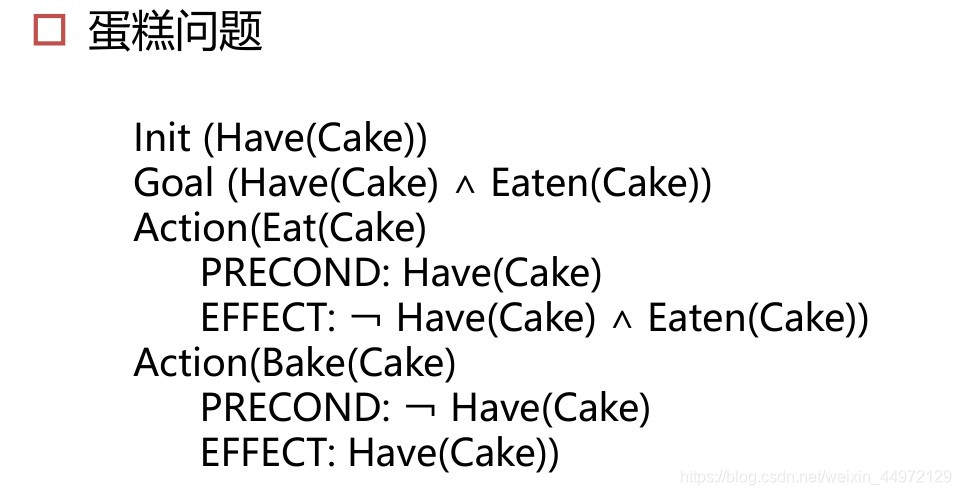



什么情况下两个动作是互斥的

Eat(cake)动作 会导致结果 ~Have(cake)
Have(cake)动作 会导致结果 Have(cake) 这两个动作导致的结果是互斥的,那么这两个动作就是互斥关系


什么情况下两个文字互斥
- 一个文字是另一个文字的负
比如:S1状态中的 Have(cake) 和 ~Have(cake)

利用规划图进行启发式估计





魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 2
2 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)