【计算机视觉】复习笔记
【计算机视觉】复习笔记。什么是滤波什么时候利用滤波滤波的种类:线性滤波:用相邻的线性组合 (加权和)替换每个像素卷积:(权重核反转(水平和垂直))
【计算机视觉】复习笔记
图像和图像滤波
-
什么是滤波
形成一个新的图像,其像素是原始像素的组合
-
什么时候利用滤波
- 增强图像: 降噪、锐化
- 提取信息: 提取边缘或轮廓
滤波的种类:
-
线性滤波:用相邻的线性组合 (加权和)替换每个像素
- 线性组合的系数称为权重核
卷积:(权重核反转(水平和垂直))
G [ i , j ] = ∑ u = − k k ∑ v = − k k H [ u , v ] F [ i − u , j − v ] G [ i , j ] = \sum _ { u = - k } ^ { k } \sum _ { v = - k } ^ { k } H [ u , v ] F [ i - u , j - v ] G[i,j]=u=−k∑kv=−k∑kH[u,v]F[i−u,j−v]
记为
G = H ∗ F G=H*F G=H∗F
相关:
G [ i , j ] = ∑ u = − k k ∑ v = − k k H [ u , v ] F [ i + u , j + v ] G [ i , j ] = \sum _ { u = - k } ^ { k } \sum _ { v = - k } ^ { k } H [ u , v ] F [ i + u , j + v ] G[i,j]=u=−k∑kv=−k∑kH[u,v]F[i+u,j+v]
记为:
G = H ⊗ F G = H \otimes F G=H⊗F -
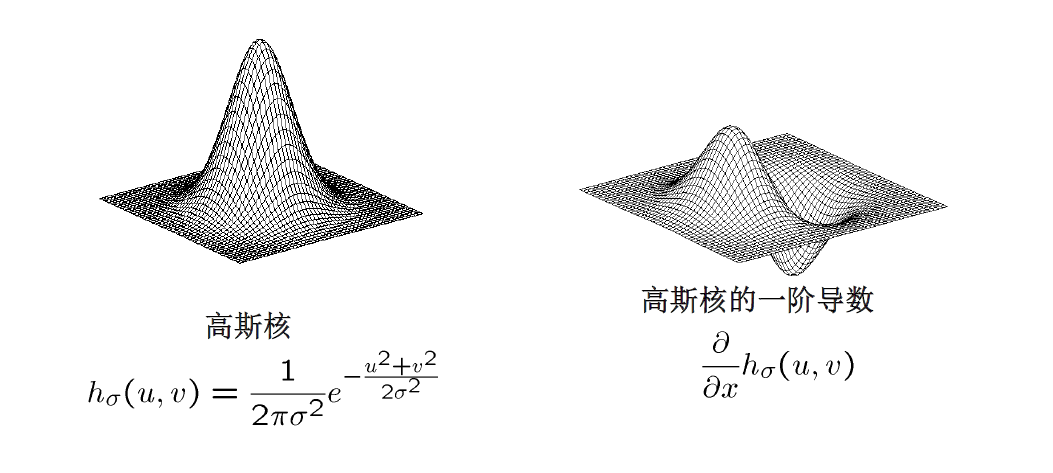
高斯滤波
从图像中删除 「高频」分量 (低通滤波器)
高斯核函数:
G σ = 1 2 π σ 2 e − ( x 2 + y 2 ) 2 σ 2 G _ { \sigma } = \frac { 1 } { 2 \pi \sigma ^ { 2 } } e ^ { - \frac { \left( x ^ { 2 } + y ^ { 2 } \right) } { 2 \sigma ^ { 2 } } } Gσ=2πσ21e−2σ2(x2+y2)
滤波的应用
-
锐化滤波器:
F + α ( F − F ∗ H ) F + \alpha (F-F*H) F+α(F−F∗H) -
阈值滤波器
g ( m , n ) = { 255 , f ( m , n ) > A 0 otherwise g ( m , n ) = \left\{ \begin{array} { c c } { 255 , } & { f ( m , n ) > A } \\ { 0 } & { \text { otherwise } } \end{array} \right. g(m,n)={255,0f(m,n)>A otherwise
阈值滤波器不是线性滤波 -
相关和卷积的定义和关系
-
高斯核
- 调节哪个参数
-
什么是线性滤波器
-
去燥使用什么滤波
边缘检测
边缘的特征
怎样通过导数来反映边缘
- 对于图像强度的一阶导数,边缘对应于导数的极值
如何计算数字图像的导数?
-
重建连续图像,然后计算导数
-
采用离散导数(有限差分): 图像的梯度相当于两个相邻像素之间的差值
∂ f ∂ x [ x , y ] ≈ F [ x + 1 , y ] − F [ x , y ] \frac { \partial f } { \partial x } [ x , y ] \approx F [ x + 1 , y ] - F [ x , y ] ∂x∂f[x,y]≈F[x+1,y]−F[x,y]
可以使用线性滤波器实现梯度的方向 垂直于边缘的方向,梯度的方向是 图像函数 f(x,y) 变化最快的方向,当图像中存在边缘时,一定有较大的梯度
图像梯度
图像梯度是图像函数在 x ,y 两个方向的导数,
幅值:
∥ ∇ f ∥ = ( ∂ f ∂ x ) 2 + ( ∂ f ∂ y ) 2 \| \nabla f \| = \sqrt { \left( \frac { \partial f } { \partial x } \right) ^ { 2 } + \left( \frac { \partial f } { \partial y } \right) ^ { 2 } } ∥∇f∥=(∂x∂f)2+(∂y∂f)2
方向:
θ = tan − 1 ( ∂ f ∂ y / ∂ f ∂ x ) \theta = \tan ^ { - 1 } \left( \frac { \partial f } { \partial y } / \frac { \partial f } { \partial x } \right) θ=tan−1(∂y∂f/∂x∂f)
要计算图像梯度,首先要图像去噪,使用高斯核在图像上卷积,平滑图像
可以将两次滤波 (高斯滤波、差分滤波)合成一步实现
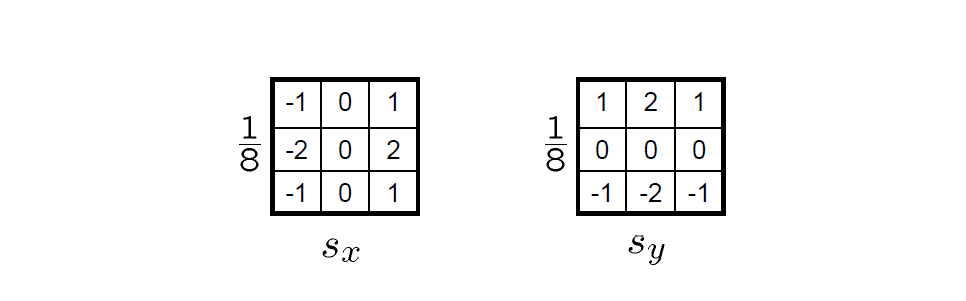
二维边缘检测使用的图像算子:
-
Sobel 算子
非最大抑制
检查像素是否为沿梯度方向的局部最大值 (需要进行像素差值?)
-
Canny 边缘检测器
- 用高斯导数滤波
- 获得梯度的幅值和方向
- 非最大抑制
- 连接与滞后阈值化:
- 定义高低两个阈值
- 用高阈值来寻找边缘曲线的起点,用低阈值来确定后继点,进行连接
Canny 边缘检测器的参数:
- σ : \sigma: σ: 高斯模糊的宽度:大的 σ \sigma σ 可以检测大尺度边缘,$\sigma $ 越小,能检测到的细微边缘就越多
- 高阈值
- 低阈值
- 图像的导数
- 图像的梯度是什么 (两个方向的导数)(复制和方向)
- 去噪
- 二维边缘检测
- 列举几个图像算子
- 费最大值抑制
- 边缘检测器
图像的插值和重采样
图像采样
-
采样率
奈奎斯特采样率: 采样率 >= 2*图像中的最大频率
若原始图像的频率过高,先对图像滤波,然后子采样,构建高斯金字塔
图像插值
- 最近邻差值:重复 n 次
- 双线性插值: 利用输入图像中与输出图像像素点映射位置最邻近的4个像素点的颜色值(或灰度值)计算输出图像中像素点的颜色值(或灰度值)
- 双三次插值:为了得到更精确的(x’,y’)的颜色值(或灰度值)g(x’,y’),就不仅需要考虑与(x’,y’)点最邻近的四个点对它的影响,还要考虑到该点周围16个相邻点的颜色值(或灰度值)对它的影响。
角点检测
Harris 角点检测:将窗口平移,比较平移前后 w 内每个像素的差异平方和(SSD)
E ( u , v ) = ∑ ( x , y ) ∈ W [ I ( x + u , y + v ) − I ( x , y ) ] 2 E ( u , v ) = \sum _ { ( x , y ) \in W } [ I ( x + u , y + v ) - I ( x , y ) ] ^ { 2 } E(u,v)=(x,y)∈W∑[I(x+u,y+v)−I(x,y)]2
E ( u , v ) = ∑ ( x , y ) ∈ W [ I ( x + u , y + v ) − I ( x , y ) ] 2 ≈ ∑ ( x , y ) ∈ W [ I ( x , y ) + I x u + I y v − I ( x , y ) ] 2 ≈ ∑ ( x , y ) ∈ W [ I x u + I y v ] 2 ≈ A u 2 + 2 B u v + C v 2 \begin{aligned} E ( u , v ) = & \sum _ { ( x , y ) \in W } [ I ( x + u , y + v ) - I ( x , y ) ] ^ { 2 } \\ \approx & \sum _ { ( x , y ) \in W } \left[ I ( x , y ) + I _ { x } u + I _ { y } v - I ( x , y ) \right] ^ { 2 } \\ \approx & \sum _ { ( x , y ) \in W } \left[ I _ { x } u + I _ { y } v \right] ^ { 2 }\\ \approx Au^2+2Buv +Cv^2\\ \end{aligned} E(u,v)=≈≈≈Au2+2Buv+Cv2(x,y)∈W∑[I(x+u,y+v)−I(x,y)]2(x,y)∈W∑[I(x,y)+Ixu+Iyv−I(x,y)]2(x,y)∈W∑[Ixu+Iyv]2
A = ∑ ( x , y ) ∈ W I x 2 B = ∑ ( x , y ) ∈ W I x I y C = ∑ ( x , y ) ∈ W I y 2 A = \sum _ { ( x , y ) \in W } I _ { x } ^ { 2 } \quad B = \sum _ { ( x , y ) \in W } I _ { x } I _ { y } \quad C = \sum _ { ( x , y ) \in W } I _ { y } ^ { 2 } A=(x,y)∈W∑Ix2B=(x,y)∈W∑IxIyC=(x,y)∈W∑Iy2
算法实现:
-
计算图像在 X, Y 两个方向的梯度
-
计算两个方向上梯度的乘积
-
使用高斯函数对 I x 2 , I y 2 , I x I y I_x^2,I_y^2,I_xI_y Ix2,Iy2,IxIy 进行高斯加权,生成矩阵的元素 A,B,C
-
计算每个像素的 Harris 响应值 R, 并对小于某个阈值的 R 置 0
R = { R : det M − α ( trace M ) 2 < t } R = \left\{ R : \operatorname { det } M - \alpha ( \operatorname { trace } M ) ^ { 2 } < t \right\} R={R:detM−α(traceM)2<t} -
在邻域内进行非最大抑制,局部最大值即为图像的角点
特征不变性
我们希望角点的位置对光度变换具有不变性 (图像变换之后,角点位置不变),对几何变换具有协变性 (相应位置检测到同一特征)
不变性:
- 对平移、旋转协变
- 对强度平移具有不变性,对强度缩放不具有不变性
- 对缩放不具有不变性
- 需要同时在位置和尺度上查找:自动尺度选择
自动尺度选择:
- 在高斯金字塔中使用固定大小的窗口,寻找具有局部最大值的尺度
斑点检测:
斑点是指二维图像中和周围颜色有颜色差异和灰度差异的区域,因为斑点代表的是一个区域,所以其相对于单纯的角点,具有更好的稳定性和更好的抗干扰能力.
-
核函数:
-
高斯拉普拉斯:
∇ 2 g = ∂ 2 g ∂ x 2 + ∂ 2 g ∂ y 2 \nabla ^ { 2 } g = \frac { \partial ^ { 2 } g } { \partial x ^ { 2 } } + \frac { \partial ^ { 2 } g } { \partial y ^ { 2 } } ∇2g=∂x2∂2g+∂y2∂2g -
高斯差分函数
D o G = G ( x , y , k σ ) − G ( x , y , σ ) D o G = G ( x , y , k \sigma ) - G ( x , y , \sigma ) DoG=G(x,y,kσ)−G(x,y,σ)
-
-
当 σ = r / 2 \sigma = r/\sqrt{2} σ=r/2 时,响应最大,图像黑白反向时,响应最小,因此将高斯拉普拉斯算子响应达到峰值的 σ \sigma σ 值,称为特征尺度
-
怎么实现特征的不变
-
Harris 检测的步骤
特征描述与匹配
特征描述符
-
MOPS:
- 选取特征点周围 40*40 的方形窗口
- 缩放到 1/5 大小
- 旋转特征向量方向到水平
- 在以特征为中心的 8*8 方形窗口内采样
- 规格化 (强度减去平均值,除以标准差,均值为0,方差为1)
-
SIFT:尺度不变特征转换
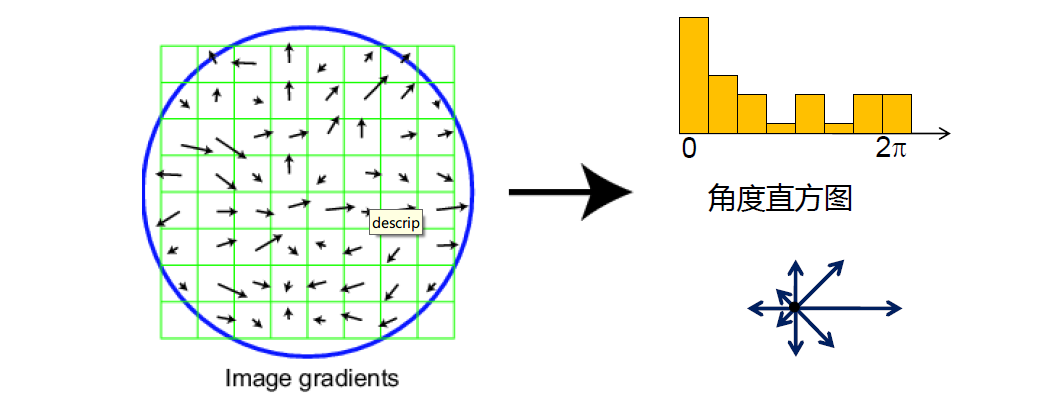
- 在所检测的特征周围取 16*16 的窗口
- 为每个像素计算边缘方向
- 去除弱的边缘方向(设定阈值)
- 为剩余边缘方向建立直方图
特征匹配
-
特征距离
-
更好的方法:距离比
f 2 f_2 f2 是 f 1 f_1 f1 在 I 2 I_2 I2 中最好的 SSD 匹配, f 2 ′ f_2^\prime f2′ 次之
距离比 = ∣ ∣ f 1 − f 2 ∣ ∣ ∣ ∣ f 1 − f 2 ′ ∣ ∣ 距离比 = \frac{||f_1-f_2||}{||f_1-f_2^\prime||} 距离比=∣∣f1−f2′∣∣∣∣f1−f2∣∣
-
-
测量特征匹配的性能
- 真正例率(TPR) (召回率) = 匹配到的真正例数 / 所有真正例数
- 假正例率 (FPR) = 匹配到的假正例数/所有真正例数
- ROC 曲线:以 FPR 为横轴,TPR 为纵轴
- AUC:曲线下的面积,越大越好
变换与卷绕
什么是图像卷绕:更改图像的定义域
常见的变换
- 平移
- 欧式变换:平移+旋转
- 相似变换:平移+旋转+等比放缩
- 仿射变换:平移+旋转+等比放缩+剪切
- 投影变换:原来平行的线不再平行,但还是保持直线性
线性变换
- 等比缩放: 比例S
- 旋转角度
- 剪切
- 镜像
线性变换的性质
原点到原点
直线到直线
平行线保持平行
比率被保持
线性变换的组合是线性变换
平移不是 2D 坐标上的线性变换,我们需要 添加一个坐标 -> 齐次坐标
仿射变换
任何最后一行 为 [0,0,1] 的 3·3 矩阵表示的转换称为仿射变换,仿射变换是线性变换和平移的组合
变换完成后,平面位置不变
基本的仿射变换:
-
平移、缩放、2D 平面旋转、剪切
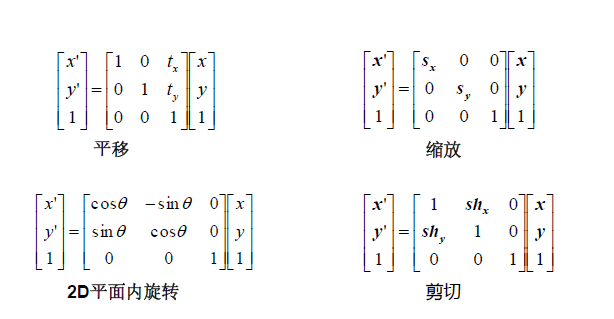
-
仿射变换是线性变换 + 平移
性质
- 原点不一定到原点
- 直线到直线
- 平行还平行
- 保持比率
- 闭包
透视变换、投影变换、同态映射
最后一元素固定为1 ,共有8个参数, 是成像平面的变换,仿射变换是特例
- 原点不一定映射到原点
- 平行线不一定保持平行
- 不保持比率
- 闭包
卷绕
卷绕有两种:
- 前向卷绕
- 反向卷绕
变换后的像素位置如果不是整数: 将像素值分配给四个最近邻,记录每个点的权重并在最后归一化
效果:混叠与模糊
-
反向卷绕
先获取每个像素在原图像中对应的位置处的像素值 (逆变换)
如果像素位置不是整数,利用原来相邻像素值插值
- 可能的插值滤波器
- 最近邻
- 双线性
- 双三次
- 窗 sinc
- 需要防止锯齿和混叠(需要预先滤波)
- 可能的插值滤波器
-
变换有哪几种
-
卷绕有两种
卷绕之后产生了非整数值怎么办
-
常见的变换
- 旋转
- 平移
- 基本仿射变换
- 仿射变换的含义是什么
图像配准
配准算法的流程,怎么实现
- 特征提取
- 匹配
- 反向变换
- 插值
优化方式
最小二乘法
图像配准算法
给定图像 A 和 B
- 计算 A、B 的图像特征
- 匹配 A、B 之间的特征
- 使用匹配集计算 A 到 B 的单应映射矩阵的最小二乘解
最小化残差平方和
定义残差:
r x i ( x t ) = ( x i + x t ) − x i ′ r y i ( y t ) = ( y i + y t ) − y i ′ \begin{array} { l } { r _ { \mathbf { x } _ { i } } \left( \mathbf { x } _ { t } \right) = \left( \mathbf { x } _ { i } + \mathbf { x } _ { t } \right) - \mathbf { x } _ { i } ^ { \prime } } \\ { r _ { \mathbf { y } _ { i } } \left( \mathbf { y } _ { t } \right) = \left( \mathbf { y } _ { i } + \mathbf { y } _ { t } \right) - \mathbf { y } _ { i } ^ { \prime } } \end{array} rxi(xt)=(xi+xt)−xi′ryi(yt)=(yi+yt)−yi′
将 n 个点形成的 2n 个方程写成矩阵方程:
[ 1 0 0 1 1 0 0 1 0 1 ⋮ 1 0 0 1 ] [ x t y t ] = [ x 1 ′ − x 1 y 1 ′ − y 1 x 1 ′ − x 2 y 2 ′ − y 2 ⋮ x n ′ − x n y n ′ − y n ] \left[ \begin{array} { l l } { 1 } & { 0 } \\ { 0 } & { 1 } \\ { 1 } & { 0 } \\ { 0 } & { 1 } \\ { 0 } & { 1 } \\ { \vdots } \\ { 1 } & { 0 } \\ { 0 } & { 1 } \end{array} \right] \left[ \begin{array} { l } { x _ { t } } \\ { y _ { t } } \end{array} \right] = \left[ \begin{array} { c } { x _ { 1 } ^ { \prime } - x _ { 1 } } \\ { y _ { 1 } ^ { \prime } - y _ { 1 } } \\ { x _ { 1 } ^ { \prime } - x _ { 2 } } \\ { y _ { 2 } ^ { \prime } - y _ { 2 } } \\ { \vdots } \\ { x _ { n } ^ { \prime } - x _ { n } } \\ { y _ { n } ^ { \prime } - y _ { n } } \end{array} \right]
10100⋮100101101
[xtyt]=
x1′−x1y1′−y1x1′−x2y2′−y2⋮xn′−xnyn′−yn
A t = b At =b At=b
找到 t ,最大限度的减少
∥ A t − b ∥ 2 \| \mathbf { A } \mathbf { t } - \mathbf { b } \| ^ { 2 } ∥At−b∥2
A T A t = A T b t = ( A T A ) − 1 A T b \begin{array} { c } { \mathbf { A } ^ { \mathrm { T } } \mathbf { A } \mathbf { t } = \mathbf { A } ^ { \mathrm { T } } \mathbf { b } } \\ { \mathbf { t } = \left( \mathbf { A } ^ { \mathrm { T } } \mathbf { A } \right) ^ { - 1 } \mathbf { A } ^ { \mathrm { T } } \mathbf { b } } \end{array} ATAt=ATbt=(ATA)−1ATb
对于仿射变换:
[ x ′ y ′ 1 ] = [ a b c d e f 0 0 1 ] [ x y 1 ] \left[ \begin{array} { l } { x ^ { \prime } } \\ { y ^ { \prime } } \\ { 1 } \end{array} \right] = \left[ \begin{array} { l l l } { a } & { b } & { c } \\ { d } & { e } & { f } \\ { 0 } & { 0 } & { 1 } \end{array} \right] \left[ \begin{array} { l } { x } \\ { y } \\ { 1 } \end{array} \right]
x′y′1
=
ad0be0cf1
xy1
有六个未知数,每个匹配有两个方程,我们需要三个匹配
残差:
r x i ( a , b , c , d , e , f ) = ( a x i + b y i + c ) − x i ′ r y i ( a , b , c , d , e , f ) = ( d x i + e y i + f ) − y i ′ \begin{aligned} r _ { x _ { i } } ( a , b , c , d , e , f ) & = \left( a x _ { i } + b y _ { i } + c \right) - x _ { i } ^ { \prime } \\ r _ { y _ { i } } ( a , b , c , d , e , f ) & = \left( d x _ { i } + e y _ { i } + f \right) - y _ { i } ^ { \prime } \end{aligned} rxi(a,b,c,d,e,f)ryi(a,b,c,d,e,f)=(axi+byi+c)−xi′=(dxi+eyi+f)−yi′
对于同态映射(透视变换)
[ x i ′ y i ′ 1 ] ≅ [ h 00 h 01 h 02 h 10 h 11 h 12 h 20 h 21 h 22 ] [ x i y i 1 ] \left[ \begin{array} { c } { x _ { i } ^ { \prime } } \\ { y _ { i } ^ { \prime } } \\ { 1 } \end{array} \right] \cong \left[ \begin{array} { l l l } { h _ { 00 } } & { h _ { 01 } } & { h _ { 02 } } \\ { h _ { 10 } } & { h _ { 11 } } & { h _ { 12 } } \\ { h _ { 20 } } & { h _ { 21 } } & { h _ { 22 } } \end{array} \right] \left[ \begin{array} { c } { x _ { i } } \\ { y _ { i } } \\ { 1 } \end{array} \right]
xi′yi′1
≅
h00h10h20h01h11h21h02h12h22
xiyi1
x i ′ ( h 20 x i + h 21 y i + h 22 ) = h 00 x i + h 01 y i + h 02 y i ′ ( h 20 x i + h 21 y i + h 22 ) = h 10 x i + h 11 y i + h 12 \begin{aligned} x _ { i } ^ { \prime } \left( h _ { 20 } x _ { i } + h _ { 21 } y _ { i } + h _ { 22 } \right) & = h _ { 00 } x _ { i } + h _ { 01 } y _ { i } + h _ { 02 } \\ y _ { i } ^ { \prime } \left( h _ { 20 } x _ { i } + h _ { 21 } y _ { i } + h _ { 22 } \right) & = h _ { 10 } x _ { i } + h _ { 11 } y _ { i } + h _ { 12 } \end{aligned} xi′(h20xi+h21yi+h22)yi′(h20xi+h21yi+h22)=h00xi+h01yi+h02=h10xi+h11yi+h12
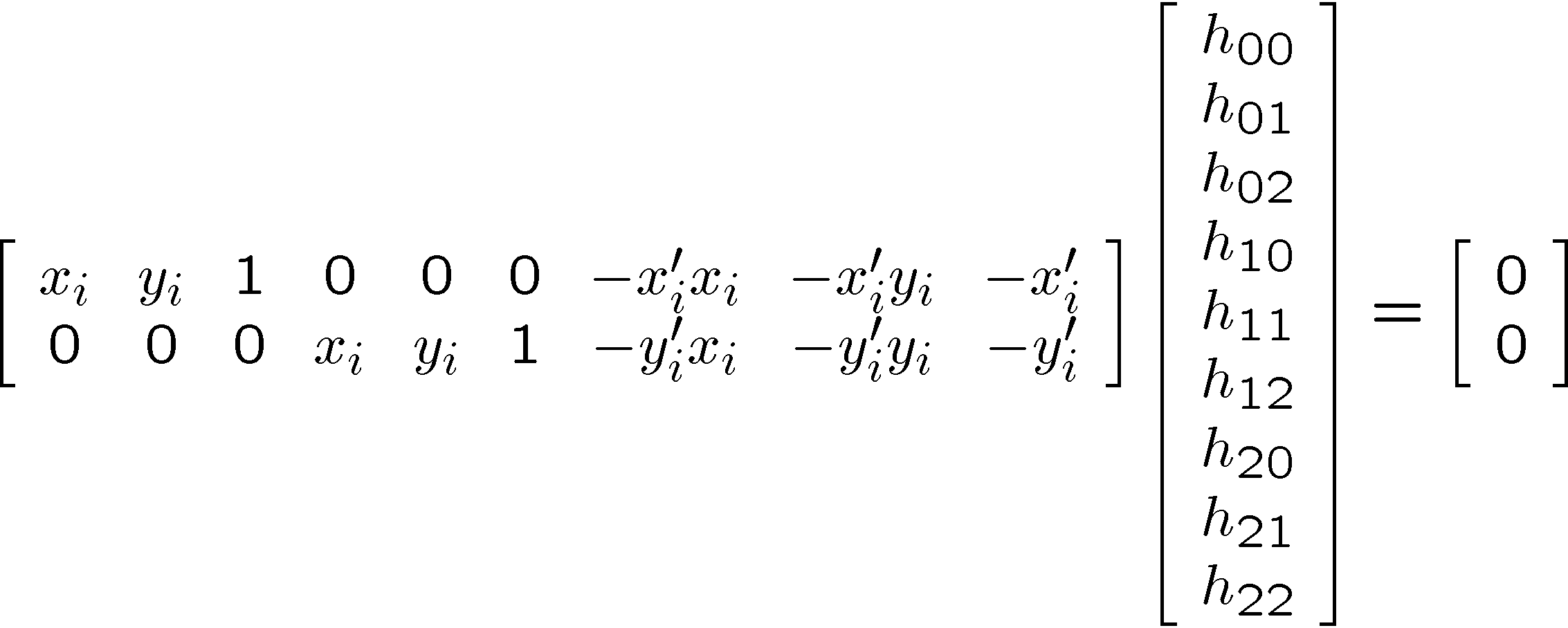
Ah = 0 的非平凡最小二乘解,即为 A T A A^TA ATA 具有最小特征值的特征向量
RANSAC 随机抽样一致
如何计算
- 随机抽取
- 计算匹配误差
Ransac 算法
- 随机选择 S 个样本
- 通常 s 等于可以求解模型的最少样本数量
- 使用这 s 个样本求得一个解
- 计数符合模型的 inliers 数
- 重复 N 次
- 选择具有最多 inliers 数的模型
- 使用所有的 inliers 点,采用最小平方拟合
实验轮数的确定
- p p p 数内点的概率
- s s s 是每次实验使用样本点的数目
- P P P 为实验最终成功找到正确解的概率
- R R R 为实验轮数
1 − P = ( 1 − p s ) R R = log ( 1 − P ) log ( 1 − p s ) \begin{array} { l } {{ 1 } - { P } = \left( { 1 } - { p } ^ { s } \right) ^ { { R } } } \\ { { R } = \frac { \log ( 1 - \boldsymbol { P } ) } { \log \left( \mathbf { 1 } - \boldsymbol { p } ^ { s } \right) } } \end{array} 1−P=(1−ps)RR=log(1−ps)log(1−P)
相机
哪些是内参,哪些是外餐
坐标系
- 如何映射
- 从相机坐标系到像素坐标系
相机参数
照相机由几个参数描述:
- 从世界坐标系原点到光心COP的平移变换 T (外参数)
- 描述相机方向的旋转变换 R (外参数)
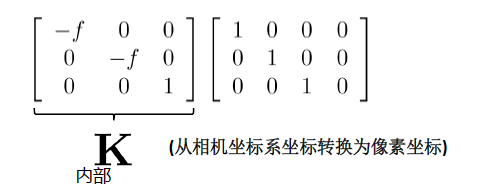
- 焦距 f、主点(x’c, y’c)、像素大小( s X s_X sX, s Y s_Y sY)(内参数)
从相机坐标到像素坐标
从世界坐标到像素坐标
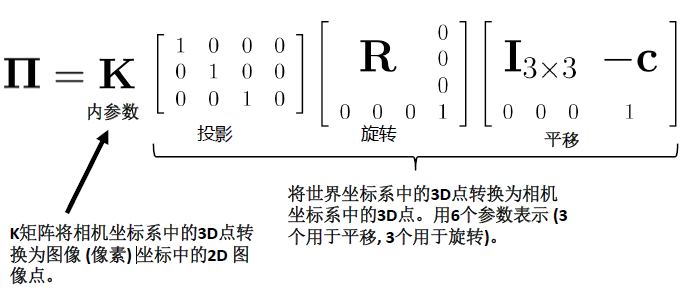
Π = K [ R ∣ − R c ] \boldsymbol { \Pi } = \mathbf { K } [ \mathbf { R } | - \mathbf { R } \mathbf { c } ] Π=K[R∣−Rc]
全景图
-
实现全景图的流程
-
围绕光心旋转相机,从同一位置拍摄一系列图像
-
计算第二个图像与第一个图像之间的变换
图像坐标系 -> 相机2坐标系 -> 相机 1 坐标系 (乘以旋转矩阵)-> 图像坐标系
-
变换使得两个图像部分重合
-
将两者融合在一起创建拼图
-
-
什么时候用柱面投影,什么时候用球面投影
单视图建模
-
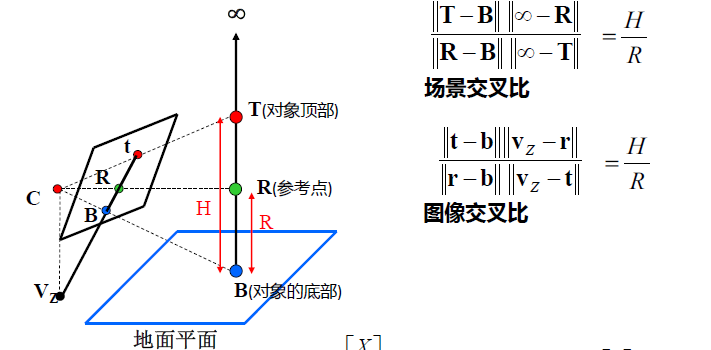
什么是无穷远点(消失点)
消失点是无穷远处一个点的投影,投影到图像中的一个有限点
- 任何两条平行线都有相同的消失点
-
怎么用消失点
用消失点计算高度
相机标定
估计相机的参数
立体视觉
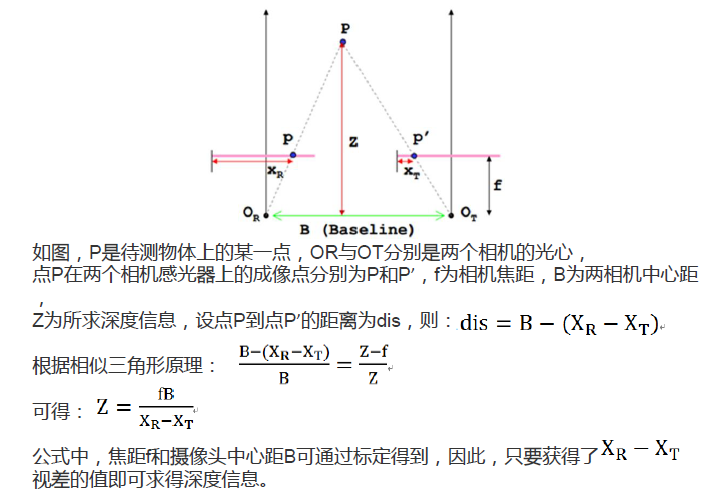
- 怎么求深度图
- 三角形相似原理
深度计算
双视图几何
- 基本矩阵: 将图像 1 中的点,映射到图像 2 中的极线
- 极点:两个光心的连线与成像平面的交点
- 极平面:由两个相机坐标原点、和物点P组成的平面
- 级线:极平面与两个像平面的交线
极线
基础矩阵(本质矩阵):用于已标定
基本矩阵:用于未标定
运动恢复结构
相机标定的步骤
最小化重投影误差平方和
- 为什么需要多视图:采用非线性最小二乘法进行优化
光的感知
- 光谱(感光细胞)
光度测量
朗伯反射率
I = k d N ∗ L I = k_dN*L I=kdN∗L
图像强度 = 反照率*表面法线方向*光源方向
对每一个像素可以求解此式获得表面法线方向
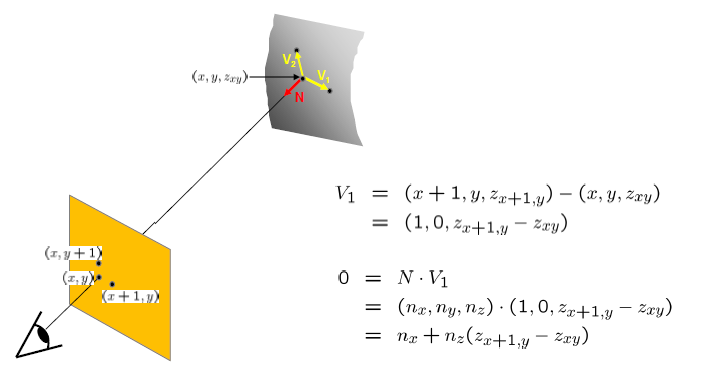
- 如何通过法线计算深度
法线计算深度
通过相邻两个像素点 xyz 做差 ,可以获得一个表面向量,这个表面向量和法线垂直,每条法线可以给出 z 的两个线性约束 z x + 1 , y , z x , y z_{x+1,y}, z_{x,y} zx+1,y,zx,y ,通过求解矩阵方程计算 z 的值
图像分类
- 过程
- 收集带标签的图像数据库
- 使用机器学习算法训练图像分类器
- 用测试图像评估分类器的效果
-
有哪些分类的方式
- 最近邻:寻找最相似的训练图像
- K近邻:从训练结果中查找 k 个最接近的点,进行投票
- 线性分类器:定义一个评分函数,寻找超平面,将正例和反例分开
-
损失函数
用来评判评分函数好还是不好,定义一个损失函数,在训练集上评估我们对分类分数的不满意程度
- 为什么要正则化:防止模型太复杂,过拟合,正则化的形式
- 表达对权重的偏好
- 使模型简单,泛化能力强
- 增加曲率,有利于优化
- 如何优化(梯度下降)
- 梯度是沿各维的偏导数向量
- 下降最快的方向是负梯度方向
- 为什么要正则化:防止模型太复杂,过拟合,正则化的形式
深度学习
- 有哪些层
- 全连接层
- 卷积层
- 池化层:缩小尺寸(对每层激活图分别做)
- 反向传播是如何传播的
- 通过上游梯度计算本地梯度
- 加法门:梯度分发
- 最大门:梯度路由
- 乘法门:梯度交换
- 通过上游梯度计算本地梯度
加油!
感谢!
努力!

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐
 1
1 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)