【模糊强化学习小波网络】基于混合方法神经网络、强化学习、模糊逻辑和小波技术结合用于控制欠驱动系统研究(Matlab代码实现)
💥💥💞💞❤️❤️💥💥博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。⛳️行百里者,半于九十。📋📋📋🎁🎁🎁。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
2.1 模糊强化学习(Fuzzy Reinforcement Learning, FRL)
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于模糊强化学习与小波网络的欠驱动系统控制方法
1. 技术背景与核心挑战
欠驱动系统(Underactuated Systems)指控制输入数量少于系统自由度的非线性系统,广泛存在于机器人、无人机、水下航行器等领域。其核心控制难点在于:① 高维状态空间与低维输入的矛盾;② 非线性动态与不确定性干扰;③ 非完整约束导致的轨迹规划困难。传统控制方法(如PID、滑模控制)在复杂场景下面临模型依赖性强、鲁棒性不足等问题。因此,结合模糊逻辑、强化学习(RL)、神经网络(NN)和小波技术的混合智能控制方法成为研究热点。
2. 核心技术要素解析
2.1 模糊强化学习(Fuzzy Reinforcement Learning, FRL)
- 核心机制:
通过模糊化处理连续状态空间,将强化学习的Q值函数与模糊规则库结合。例如,T-S模糊网络将状态变量映射为模糊集合,通过反向传播优化Q值评估,形成可解释的决策框架。 - 优势:
- 维度压缩:利用隶属度函数(如高斯函数)将高维状态映射至低维模糊集,缓解维度灾难。
- 知识融合:支持专家规则预定义与RL参数自优化的双重模式。
- 适应性:通过奖励信号动态调整模糊规则权重,应对时变系统。
2.2 小波网络(Wavelet Network, WN)
-
结构特性:
小波网络基于小波基函数构建前馈网络,兼具局部时频分析能力与神经网络的非线性拟合特性。其核心公式为:
-
控制应用:
- 信号特征提取:通过多分辨率分解(如小波包)实现非平稳信号去噪,提升状态观测精度。
- 动态建模:用于逼近欠驱动系统的未知非线性动态,例如水下机器人深度控制中的动力学补偿。
2.3 神经网络与强化学习的融合
-
深度强化学习(DRL):
MPC + 强化学习![ICRA 24] Actor Critic Model Predictive Control_哔哩哔哩_bilibili
利用深度神经网络(DNN)近似Q值函数或策略函数,解决高维状态空间问题。例如,结合模型预测控制(MPC)的混合Actor-Critic架构,通过可微分NPC模块嵌入系统先验知识8280。
【MPC+强化学习】四大名校教授精讲强化学习和模型预测控制18讲!Actor Critic模型预测控制、策略梯度方法_哔哩哔哩_bilibili
-
泛化能力增强:
图神经网络(GNN)与DRL结合,支持网络拓扑动态变化的复杂系统控制。
3. 技术协同机制与实现路径
3.1 模糊逻辑与强化学习的协同
- 模糊Q学习框架:
将状态向量输入T-S模糊网络前件层进行模糊化,后件层输出Q值的线性组合。通过梯度下降优化隶属度函数参数,实现Q值逼近与规则库的动态更新。 - 案例:
刘全等人提出基于二型模糊推理的强化学习模型,通过交叉熵优化隶属函数参数,提升对噪声的鲁棒性。
3.2 小波网络与模糊强化学习的集成
-
信号预处理层:
小波网络作为特征提取模块,对原始信号进行时频分解,输出低维特征向量至模糊强化学习模块(图1)。 -
原始信号→小波分解特征向量→FRL控制动作原始信号小波分解特征向量FRL控制动作
-
参数联合优化:
在移动机器人导航中,小波网络同时优化模糊控制器的隶属函数和规则表,减少人工调参负担。
3.3 神经网络的多角色融合
- 隶属函数生成器:
神经网络直接生成模糊控制的隶属函数,利用NN的非线性拟合能力提升模糊划分的合理性。 - 规则记忆与推理:
将模糊规则编码为神经网络的权重,通过联想记忆实现快速推理(如BP网络存储经验规则)。
4. 欠驱动系统控制中的典型应用
4.1 无人机姿态控制
- 问题特性:3自由度直升机系统仅通过两个螺旋桨控制俯仰、滚转与偏航,存在强耦合与非线性的挑战。
- 解决方案:
采用自适应模糊滑模控制(AFSMC),结合小波网络补偿未建模动态。通过李雅普诺夫稳定性分析确保鲁棒性。
4.2 桥式起重机抗摆控制
- 核心需求:抑制负载摆动的同时实现精确定位。
- 方法设计:
① 分层滑模面设计,将系统分解为驱动与欠驱动子系统;
② 小波网络逼近未知非线性摩擦;
③ 模糊逻辑动态调整滑模增益。
4.3 水下机器人深度控制
- 技术路线:
小波神经网络自抗扰控制器(WN-ADRC)融合小波去噪、NN动态补偿与模糊规则库,有效抑制水流扰动与传感器噪声。
5. 性能提升与未来方向
5.1 实验验证与优势对比
| 方法 | 收敛速度 | 抗干扰性 | 可解释性 | 计算复杂度 |
|---|---|---|---|---|
| 传统滑模控制 | 中 | 高 | 低 | 低 |
| 模糊强化学习 | 快 | 中 | 高 | 中 |
| 小波网络+FRL | 快 | 高 | 中 | 高 |
| DRL+MPC82 | 较快 | 高 | 低 | 极高 |
5.2 未来研究方向
- 轻量化设计:优化小波网络结构(如稀疏小波基),降低实时控制的计算负载。
- 跨模态学习:结合图神经网络处理多传感器异构数据。
- 安全约束嵌入:在模糊规则库中引入硬约束(如避障条件)。
- 硬件加速:基于FPGA实现小波变换与模糊推理的并行计算。
6. 结论
模糊强化学习与小波网络的结合为欠驱动系统控制提供了“知识驱动+数据驱动”的双重优势:模糊逻辑处理不确定性,强化学习实现自适应优化,小波网络增强信号处理能力,神经网络提升模型泛化性。未来需进一步探索多技术模块的紧耦合架构,并在复杂动态环境中验证其可靠性。
📚2 运行结果
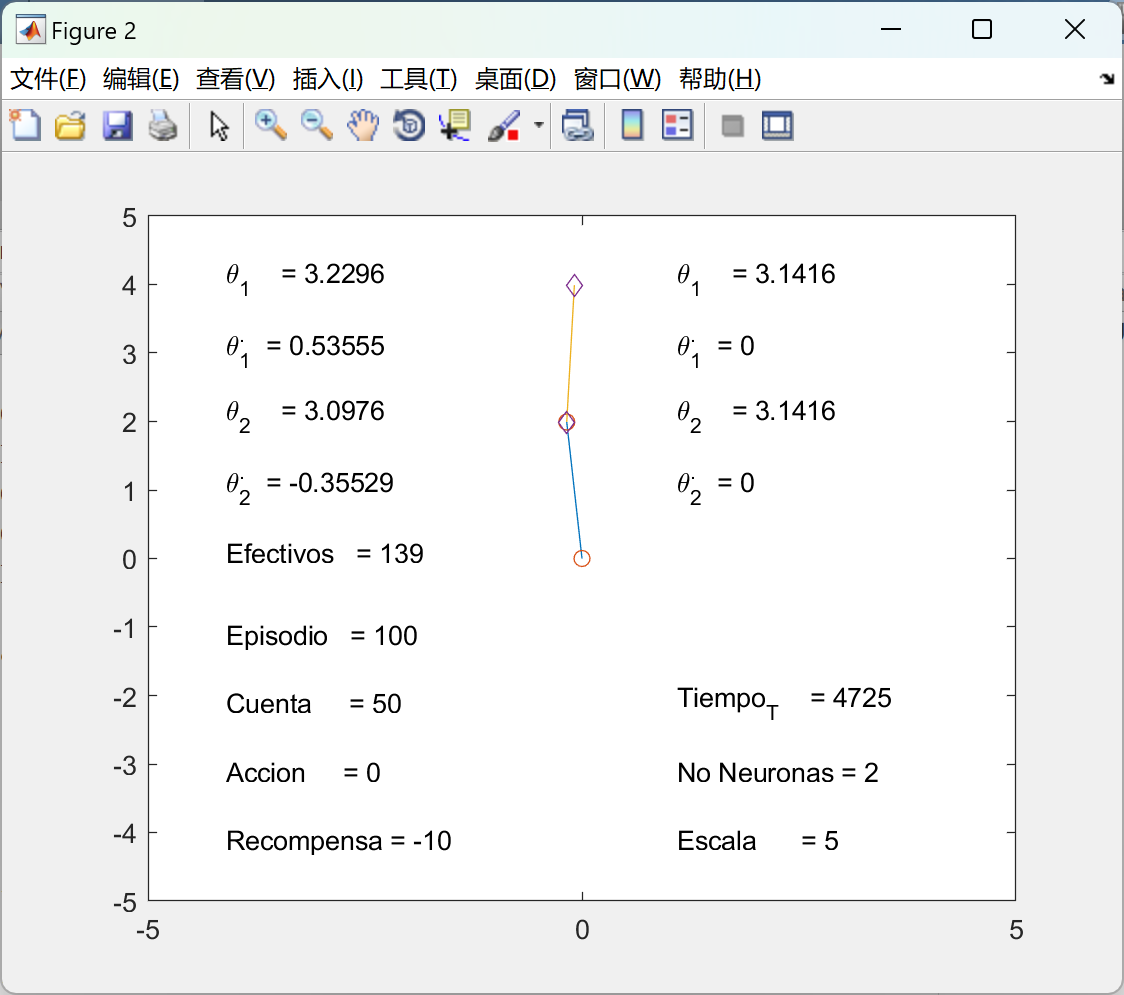
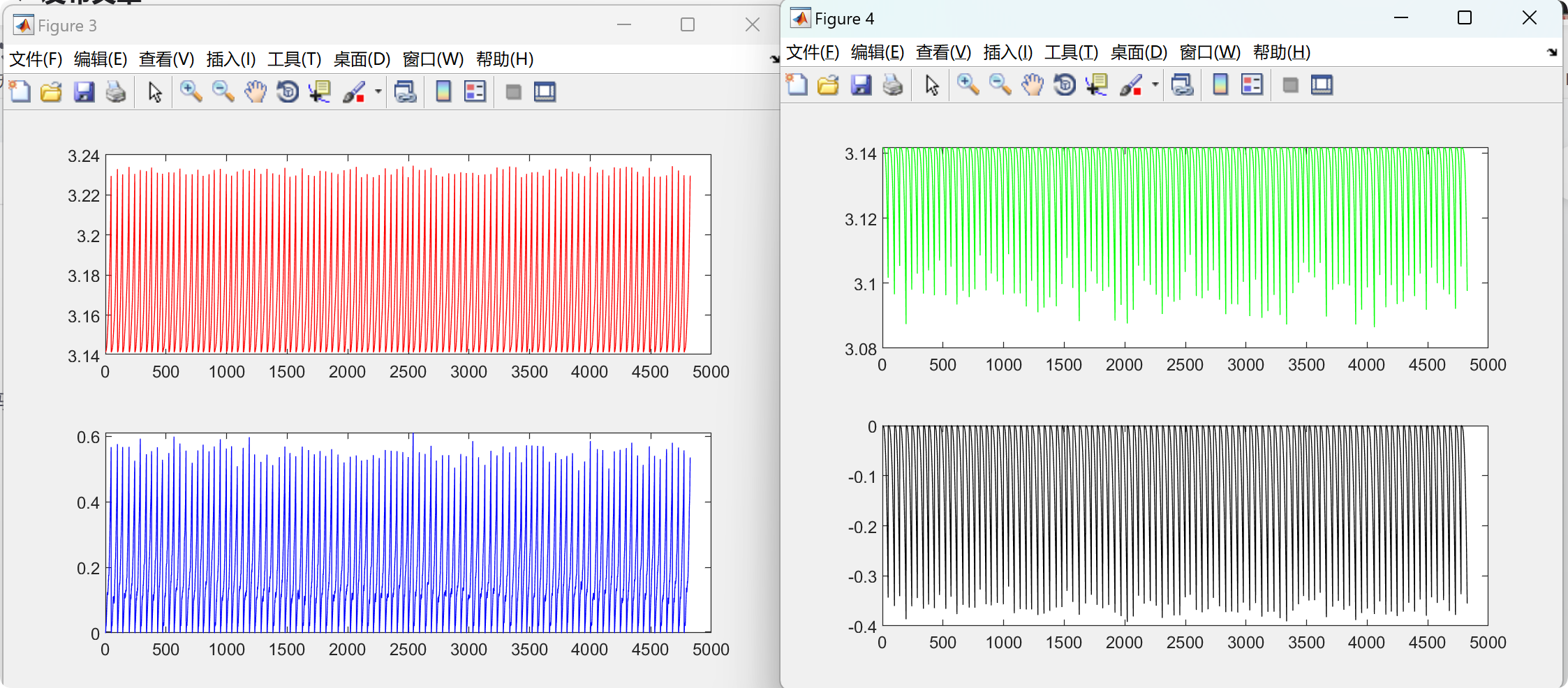
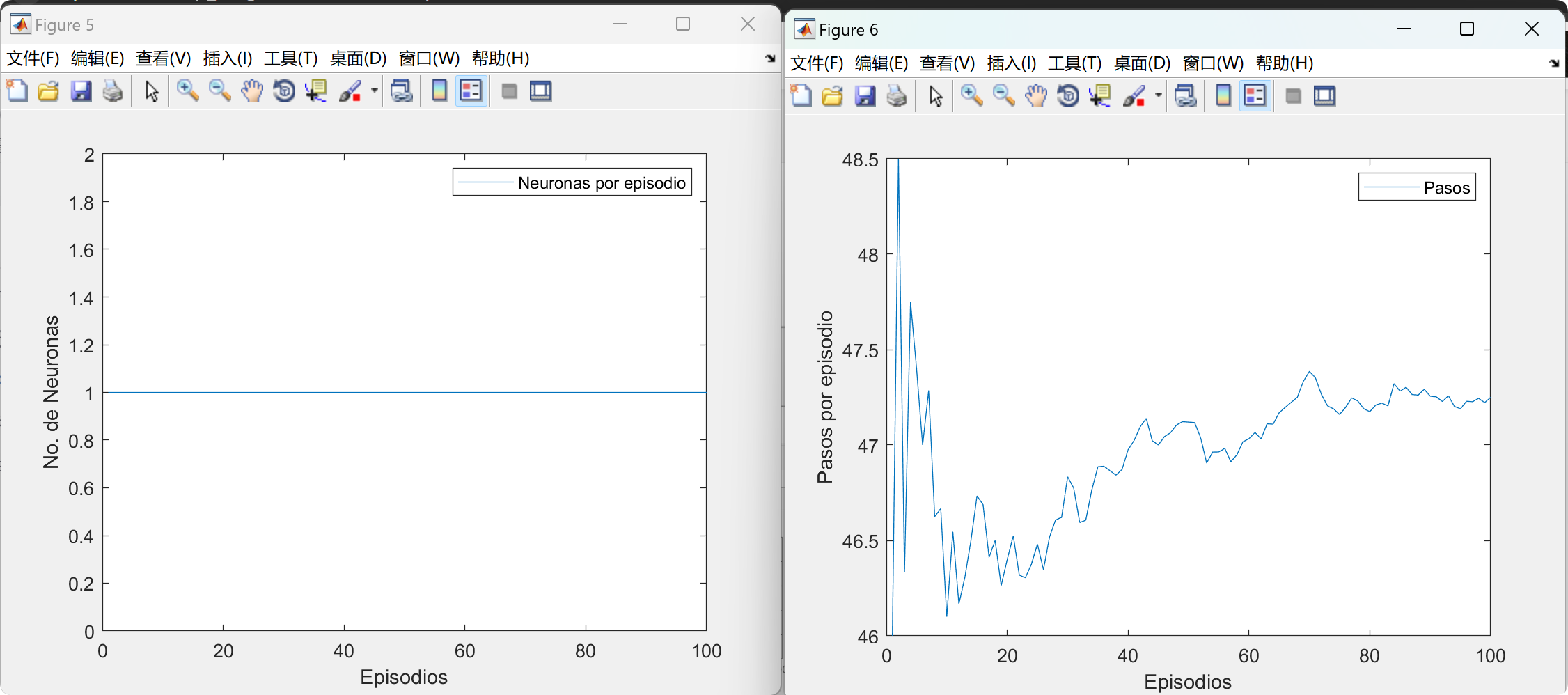
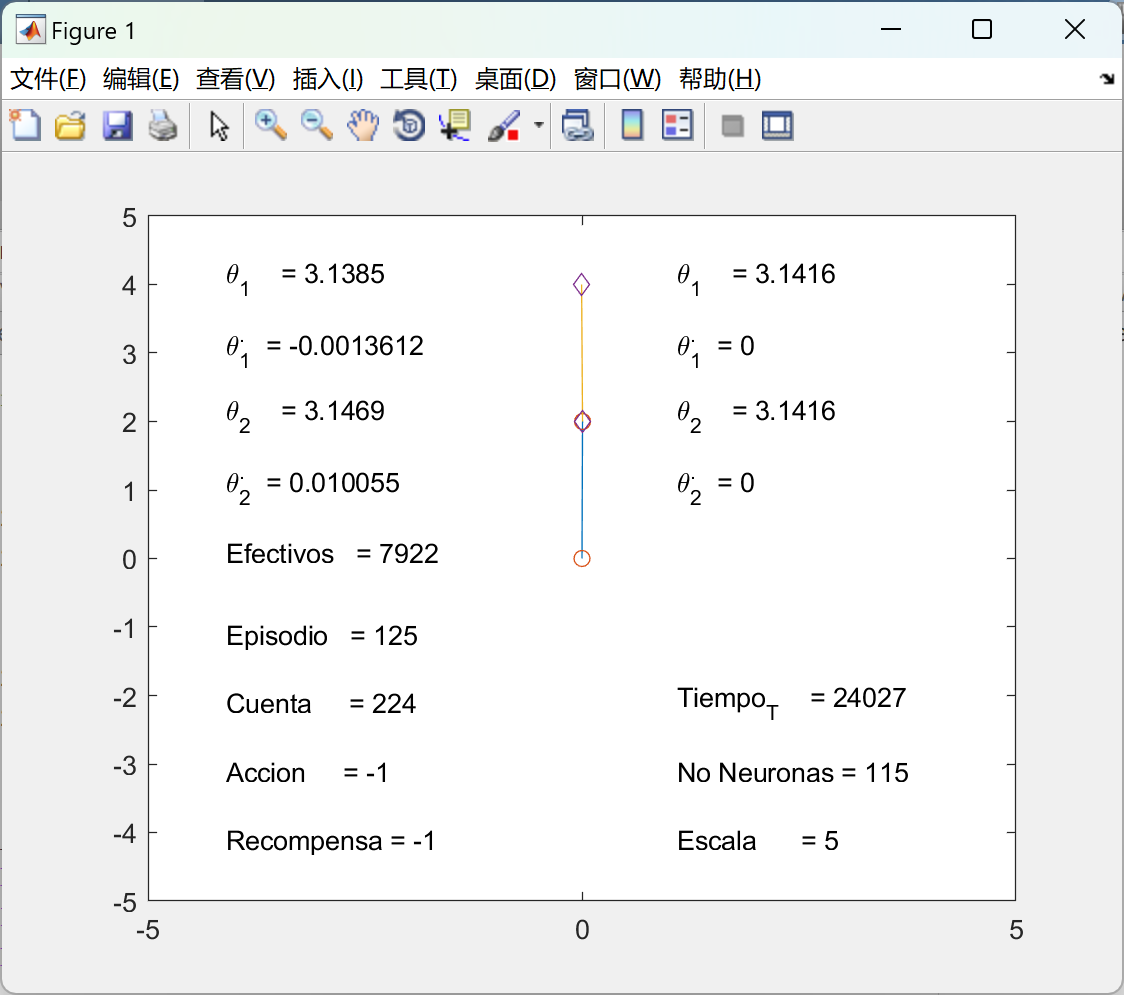
运行结果图比较多,就不一一展示。
部分代码:
load PendubotE5
iteraciones = 100;
Itera_Max = 2000; % 20 Segundos
CuentaV = 0;
%%%%%%%%%%%%%%%%%%%%% H I S T O R I A L E S %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
ANGULOS = [];
HIS_ACCION = [];
HIS_REWARD = [];
HIS_NEURON = [];
HIS_NEURONAS = [];
HIS_PROMEDIO = [];
Tiempo_Total = 0;
figure
for Iter = 1 : iteraciones
% Estado inicial
x0 = [pi;0;pi;0];
Inicial = x0;
r = -1;
ANGULOS = [ANGULOS; x0'];
HIS_REWARD = [HIS_REWARD; r];
% Ciclo para episodios
FIN = 0;
Tiempo_Epi = 0;
Indtiempo = 2;
while ( (r < 100) && (FIN == 0) )
% Guarda estados
x1 = x0(1); x1p = x0(2);
x2 = x0(3); x2p = x0(4);
% ANGULOS = [ANGULOS; x0'];
% Seleccionar accion
MYW2 = Wav4DRLSalidas([x1 x1p x2 x2p],MYWAVENET.a,MYWAVENET.b,MYWAVENET.w,Nw);
Maximo = max(MYW2.S); % Maximo valor de todas las acciones
accion = find(max(MYW2.S) == MYW2.S);
% Aplicar accion -> ode45
r = -1;
if (CTC == TC)
tau = Acciones(accion);
% Accion continua
% ACon = FIS2(MYW2.S',Acciones);
% tau = ACon;
CTC = 0;
end
CTC = CTC + 1;
%%%% PERTURBACIJA %%%%
if(mod(Tiempo_Epi,500000) == 0) 🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]徐昕.增强学习及其在移动机器人导航与控制中的应用研究[D].国防科学技术大学,2002.
[2]王茹.欠驱动船舶轨迹跟踪的自适应滑模控制研究[D].大连海事大学,2018.
[3]董早鹏,刘涛,万磊,等.基于Takagi-Sugeno模糊神经网络的欠驱动无人艇直线航迹跟踪控制[J].仪器仪表学报, 2015, 36(4):8.
🌈4 Matlab代码、数据下载
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐
 24
24 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)