备考蓝桥杯嵌入式6:串口
以9600波特率为例子,他就说明了我们的字符会在1.04ms内完成我们的传递,只要我们的定时器在检测的时候发现CNT到达了1.04ms以上的时间才会增加到的CNT,也就是说我们的定时器已经计时了超过1.04ms,我们就可以认为我们的接受已经结束了,该处理拿到的数据了。很好,这里就是我们指定的TX和RX,所以,在我们打开USART的时候,配置要更改我们的串口的RX和TX.就是这样的简单。,所以,我们
目录
串口
USART异步串口通信这个地方,我们一般对编程上就是关心的RX端和TX端。也就是发送端和接受端。注意到的是,开发板上的已经为我们安排好了特定的RX端和TX端,这跟默认的配置是不一样的,所以,我们需要做的就是当设计到串口的时候,将UART使用的RX和TX串口更改到板子指定的位置。

很好,这里就是我们指定的TX和RX,所以,在我们打开USART的时候,配置要更改我们的串口的RX和TX.就是这样的简单。
工程设置
我们打开我们的USART1后,配置串口的界面是如下的
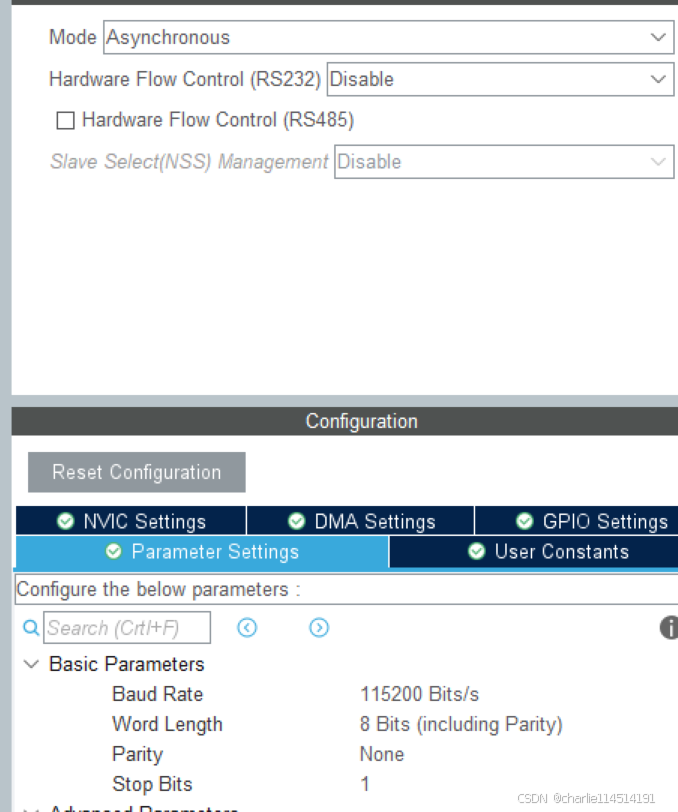
然后注意的是,我们需要
-
使能我们的串口中断

2. 更改我们的串口GPIO的TX和RX

其他部分的工程就照常设置即可。这里不再赘述。
代码书写
测试同步发送
首先,让我们测试一下我们的发送是不是正常的:
在循环里,往复的发送我们的代码,试试看:
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
snprintf(buffer, 20, "Hello, Charlie!\n");
HAL_UART_Transmit(&huart1, (uint8_t*)buffer, 20, HAL_MAX_DELAY);
HAL_Delay(1000);
}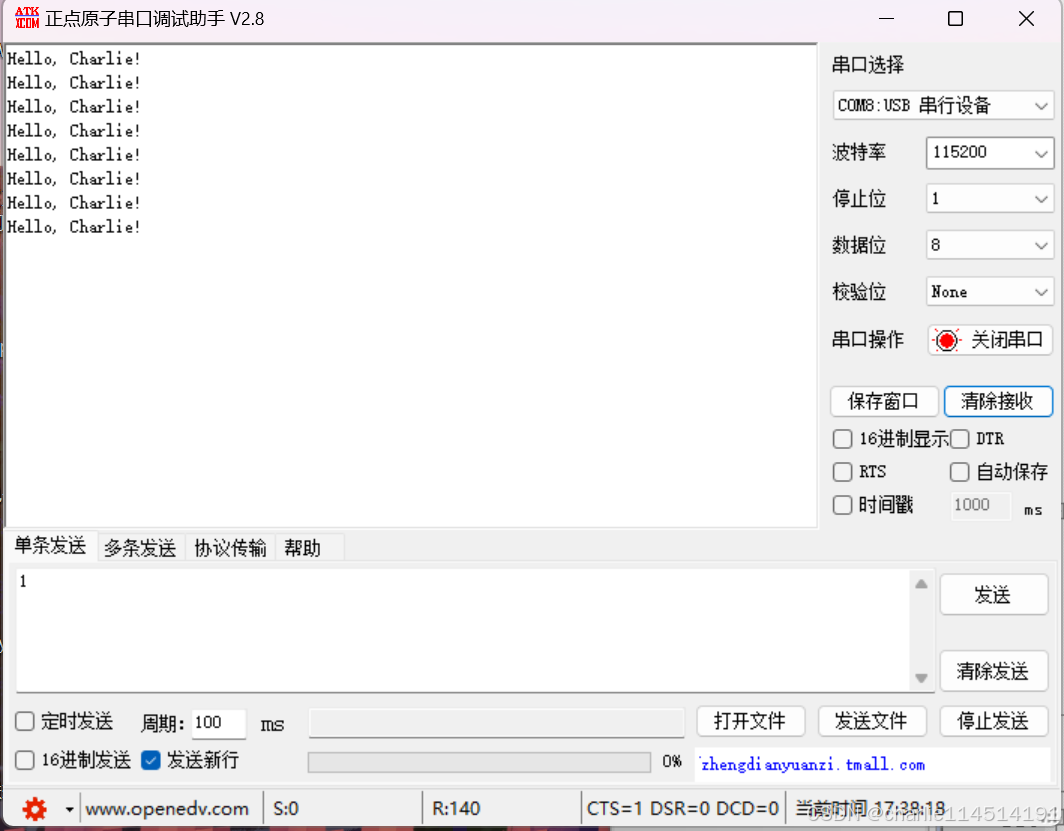
请注意,需要保证我们的串口设置的波特率和串口的端口开启的是正确的。这样我们才会正确的接受到信息。
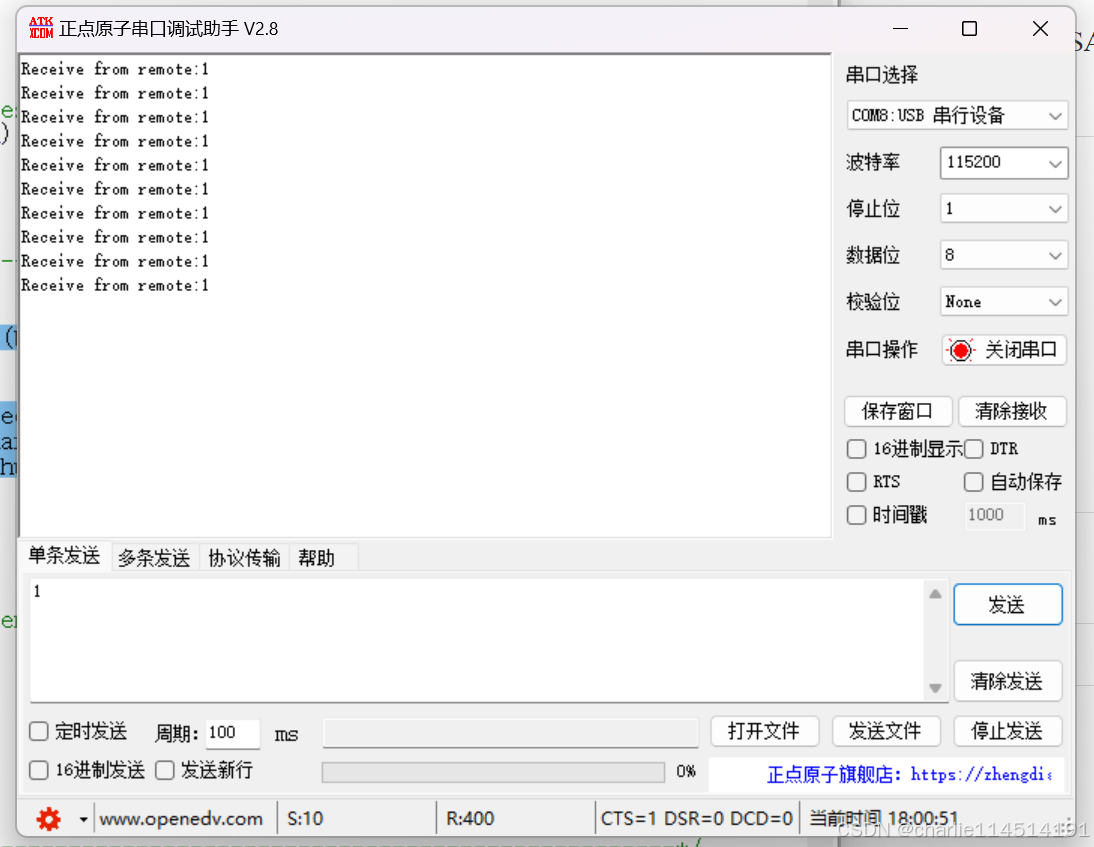
测试异步接受
异步接受则会简单一些,我们知道,采用异步发送的一个方式就是使用中断来完成我们的代码接受,当底层USART的接受移位寄存器结束工作的时候向主机通知接受结束,我们在HAL库层只需要调用代码即可。
char buf[40];
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart == &huart1){
snprintf(buf, 40, "Receive from remote:%c\n", rec);
HAL_UART_Transmit(huart, (uint8_t*)buf, 40, HAL_MAX_DELAY);
HAL_UART_Receive_IT(huart, &rec, 1);
}
}必须要注意的是,在这个逻辑下,如果我们是在需要接受的时候主动的调用Receive函数,也就是
HAL_UART_Receive_IT(&huart1, &rec, 1);
这样,我们的echo才能流转起来。
现在,我们测试结束我们的串口,我们马上就来讨论一个高阶的主题。那就是使用定时器来完成对不定长的信息的接受和分析。
一个例子
现在我们加难,我们并不知道我们接受的字符到底多少个,只知道一个上限,比如说20个字符,我们应该如何使用定时器来辅助我们进行判断。
我们知道,串口使用移位寄存器移位来传递字符,对于给定的波特率,他向我们保证了在1/波特率的时间之内传递到我们的设备当中去。以9600波特率为例子,他就说明了我们的字符会在1.04ms内完成我们的传递,只要我们的定时器在检测的时候发现CNT到达了1.04ms以上的时间才会增加到的CNT,也就是说我们的定时器已经计时了超过1.04ms,我们就可以认为我们的接受已经结束了,该处理拿到的数据了。
基于这个办法,我们只需要把定时器一开,在接受回调里对定时器进行复位,然后一个字节一个字节的搬运我们的字符就好了。
当然,笔者这里将CNT设置为了15,预分频8000,也就是留足1.5ms的时间作为阈值。
uint8_t is_received = 0;
uint8_t received;
// contains the buffer
uint8_t current_receive_offset = 0;
uint8_t buffer_receive[20];
// buffer wait send
uint8_t buffer_send[20];
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart != &huart1) return; // don't handle!
TIM4->CNT = 0; // clear the CNT, meaning that we received the char, dont quit
is_received = 1;
buffer_receive[current_receive_offset] = received;
current_receive_offset++;
// waiting for the next buffer
HAL_UART_Receive_IT(huart, &received, 1);
}
// for each bit received about 1.04ms(1 / 9600 s), we choose to let CNT > 15 for end finished!
uint8_t inline is_timeout(){
return TIM4->CNT > 15; // if is timeout, then we think the receivings is finished
} 我们可以写一个检测的函数来辅助我们完成检测:
#include <string.h>
void checking_result(void)
{
// if is equal
char* sources = "";
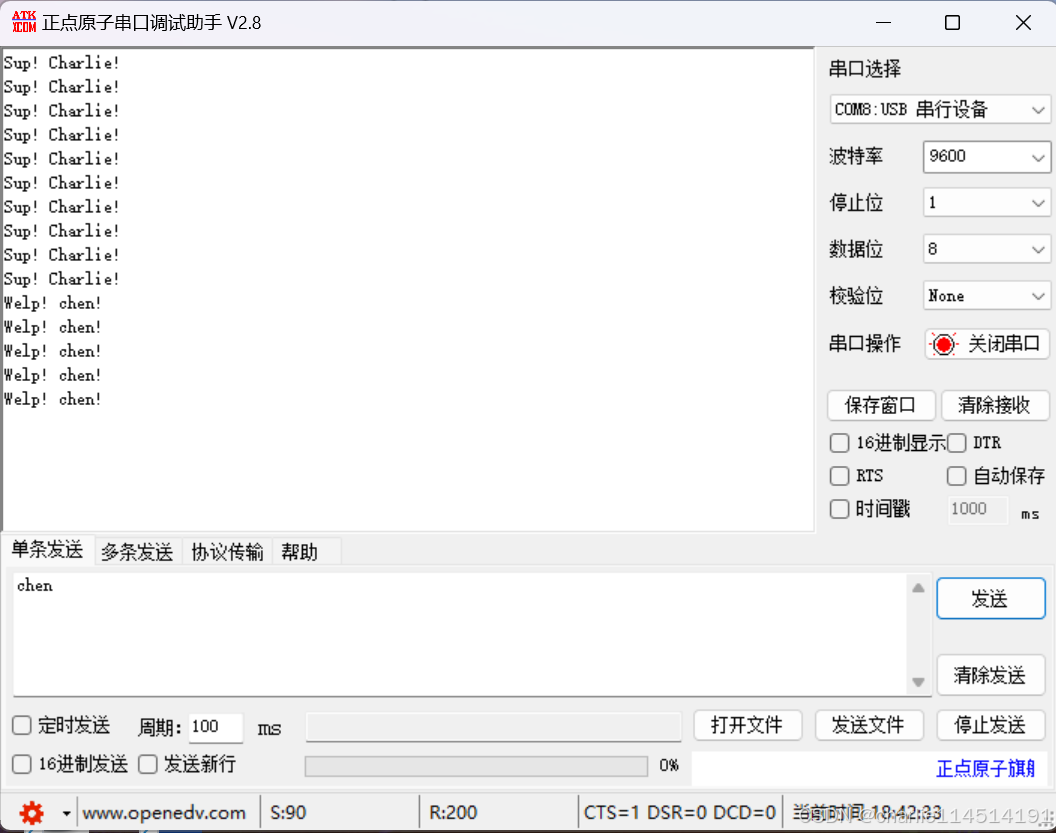
if(!strcmp("charlie", (char*)buffer_receive)){
sources = "Sup! Charlie!\n";
}else if(!strcmp("chen", (char*)buffer_receive)){
sources = "Welp! chen!\n";
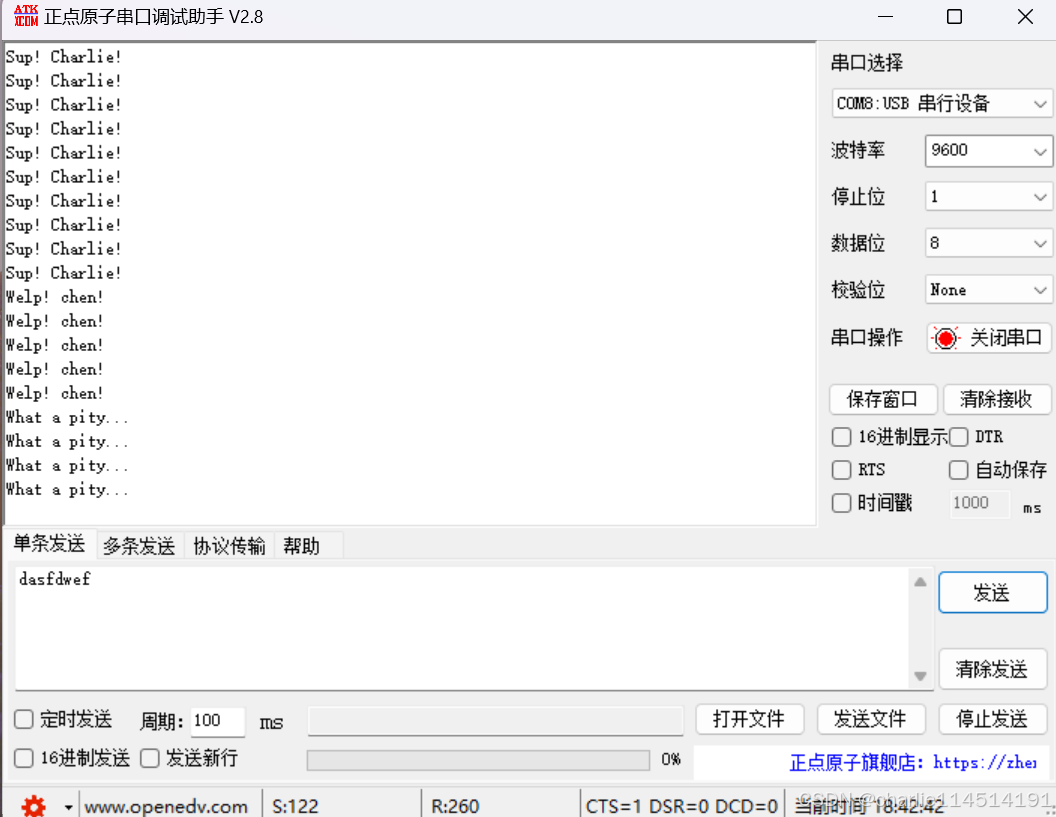
}else{
sources = "What a pity...\n";
}
HAL_UART_Transmit(&huart1, (uint8_t*)sources, strlen(sources), HAL_MAX_DELAY);
is_received = 0;
for(uint8_t i = 0; i < current_receive_offset; i++){
buffer_receive[i] = 0;
}
current_receive_offset = 0;
}
void loop_check_data(void)
{
if(!is_received) return; // nothing comes, directly quit issue
if(!is_timeout()) return; // still owns buffer waiting received!
checking_result();
}不要忘记在主函数中开定时器和检测:
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start(&htim4);
HAL_UART_Receive_IT(&huart1, &received, 1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
// buad rate is 9600, remenber to set currectly...
loop_check_data();
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */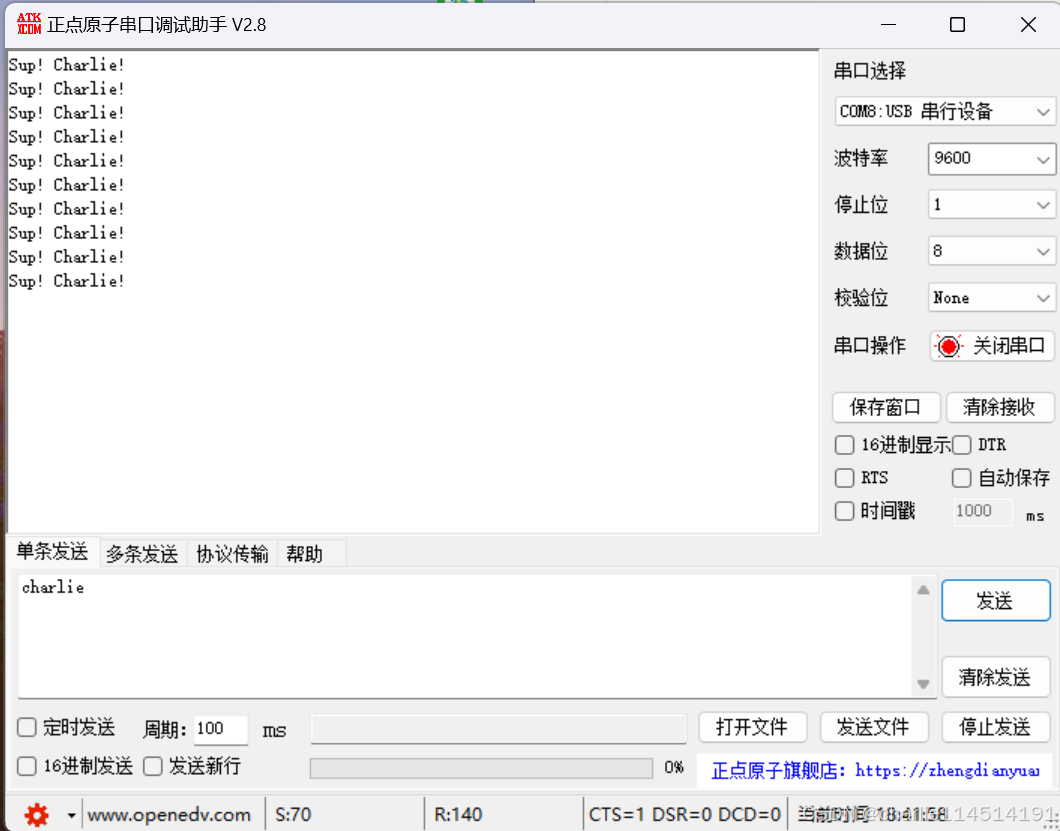

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐
 15
15 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)