嵌入式科普(21)c代码究竟是如何一步步运行的之编译
编译->链接->执行我们从最简单步骤扩展到每个细节,分别介绍其中的最关键的步骤这里面包含的知识点太多,范围也不同。我们通过类比,介绍其中的关键点,以便我们日后再深入各个细节,从而解决实际问题mpu编译和链接由gcc完成(Makefile、sh、/lib)mcu编译和链接由IDE完成处于mcu与mpu中间的如RZT2/N2、STM32H7、iMXRT116需要重点关注链接过程。
目录
上面例子展示了在stm32(arm)中从敲下代码到运行程序的过程,但是他究竟是如何一步步的实现的呢?
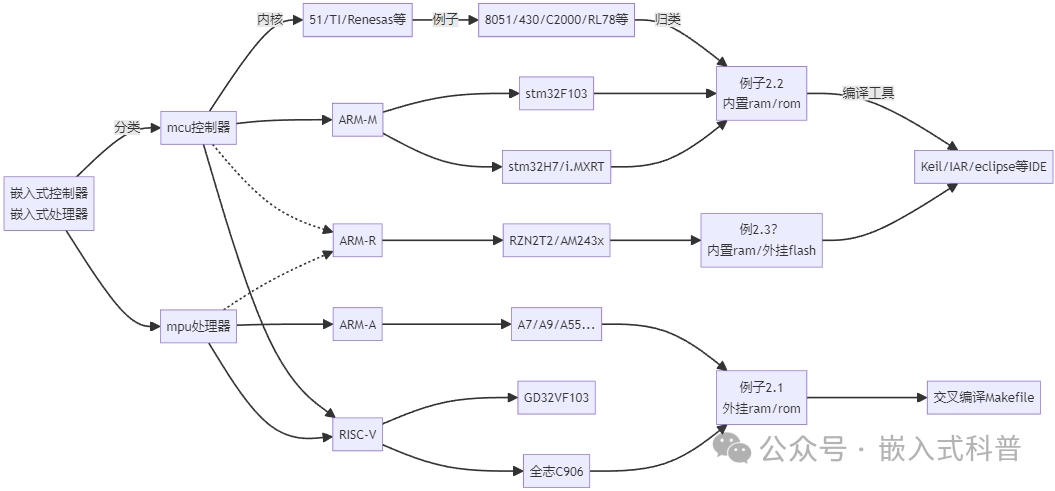
2.3 嵌入式控制器和处理器分类(TI/NXP/ST/Renesas)
3.1 linux gcc hello.c -o hello
一、概述
-
从我们敲下代码到运行程序经历了哪些步骤:编译->链接->执行
-
我们从最简单步骤扩展到每个细节,分别介绍其中的最关键的步骤
-
这里面包含的知识点太多,范围也不同。我们通过类比,介绍其中的关键点,以便我们日后再深入各个细节,从而解决实际问题
二、最简单的两个例子
2.1 linux输出Hello World
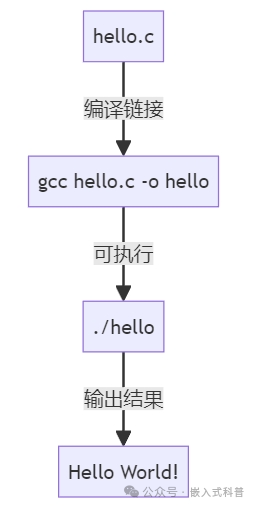
上面例子展示了在linux中从敲下代码到运行程序的过程,但是他究竟是如何一步步的实现的呢?
2.2 stm32(arm)输出Hello World
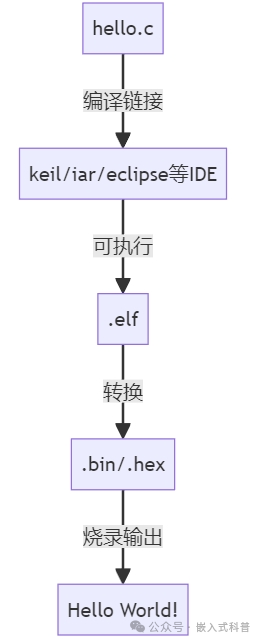
上面例子展示了在stm32(arm)中从敲下代码到运行程序的过程,但是他究竟是如何一步步的实现的呢?
2.3 嵌入式控制器和处理器分类(TI/NXP/ST/Renesas)
三、编译的过程
3.1 linux gcc hello.c -o hello
-
预处理(生成预处理后的文件):
虽然 GCC 没有直接输出预处理后文件的选项,但你可以通过重定向输出到一个文件来查看预处理后的内容。gcc -E hello.c -o hello.i-E选项告诉 GCC 只进行预处理并停止。 -
编译(生成汇编代码):
使用-S选项告诉 GCC 生成汇编代码并停止。gcc -S hello.c -o hello.s或者如果你已经有了预处理后的文件
hello.i,你也可以这样编译它:gcc -S hello.i -o hello.s -
汇编(生成目标文件):
使用-c选项告诉 GCC 只进行编译和汇编并生成目标文件。gcc -c hello.c -o hello.o或者如果你已经有了汇编代码文件
hello.s,你也可以这样汇编它:gcc -x assembler -c hello.s -o hello.o-x assembler选项告诉 GCC 接下来的文件是汇编代码。 -
链接(生成可执行文件):
默认情况下,如果你不提供-c、-S或-E选项,GCC 会执行所有的步骤并生成可执行文件。但如果你已经有了目标文件并想单独链接它,你可以这样做:gcc hello.o -o hello或者如果你有多个目标文件需要链接:
gcc hello1.o hello2.o -o hello
在实际使用中,我们通常只调用 gcc hello.c -o hello 来完成从源代码到可执行文件的整个过程,而不需要手动执行这些单独的步骤。这些步骤只是为了教学目的而分开说明的。
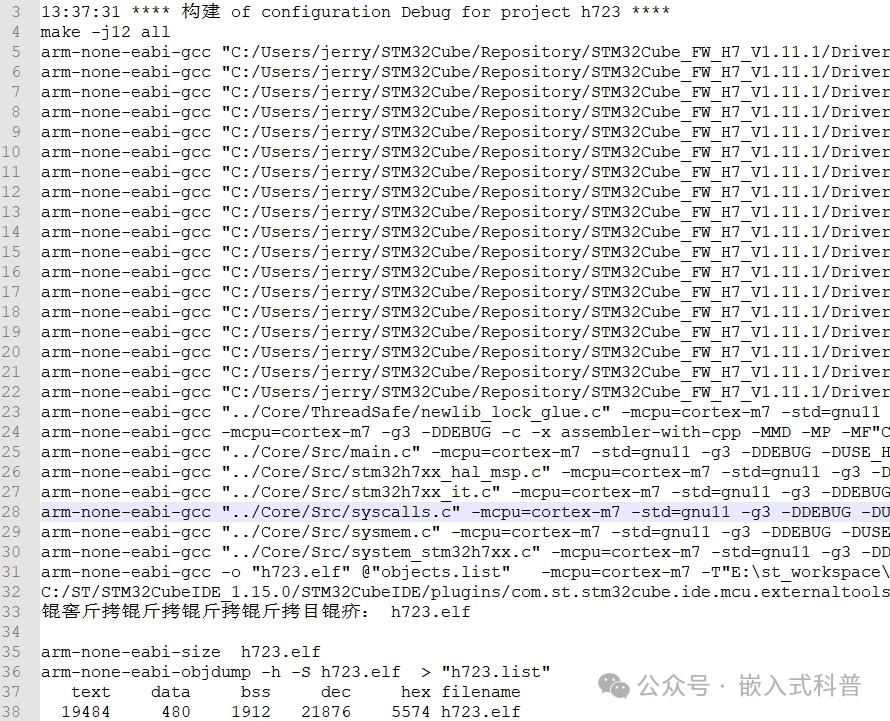
3.2 stm32cubeide gcc
-
gcc -c
arm-none-eabi-gcc "C:/Users/jerry/STM32Cube/Repository/STM32Cube_FW_H7_V1.11.1/Drivers/STM32H7xx_HAL_Driver/Src/stm32h7xx_hal.c" -mcpu=cortex-m7 -std=gnu11 -g3 -DDEBUG -DUSE_HAL_DRIVER -DSTM32H723xx -DSTM32_THREAD_SAFE_STRATEGY=2 -c -I../Core/Inc -IC:/Users/jerry/STM32Cube/Repository/STM32Cube_FW_H7_V1.11.1/Drivers/STM32H7xx_HAL_Driver/Inc -IC:/Users/jerry/STM32Cube/Repository/STM32Cube_FW_H7_V1.11.1/Drivers/STM32H7xx_HAL_Driver/Inc/Legacy -IC:/Users/jerry/STM32Cube/Repository/STM32Cube_FW_H7_V1.11.1/Drivers/CMSIS/Device/ST/STM32H7xx/Include -IC:/Users/jerry/STM32Cube/Repository/STM32Cube_FW_H7_V1.11.1/Drivers/CMSIS/Include -I../Core/ThreadSafe -O0 -ffunction-sections -fdata-sections -Wall -fstack-usage -fcyclomatic-complexity -MMD -MP -MF"Drivers/STM32H7xx_HAL_Driver/stm32h7xx_hal.d" -MT"Drivers/STM32H7xx_HAL_Driver/stm32h7xx_hal.o" --specs=nano.specs -mfpu=fpv5-d16 -mfloat-abi=hard -mthumb -o "Drivers/STM32H7xx_HAL_Driver/stm32h7xx_hal.o"这条命令是一个使用
arm-none-eabi-gcc(ARM 嵌入式 GCC)编译器的完整命令,用于编译 STM32H7xx 的 HAL(硬件抽象层)驱动源文件stm32h7xx_hal.c。我将逐一解释命令中的各个部分:1).
arm-none-eabi-gcc:这是 ARM 嵌入式 GCC 编译器的名称,用于编译 ARM 架构的裸机或嵌入式系统代码。
2). 源文件:"C:/Users/jerry/STM32Cube/Repository/STM32Cube_FW_H7_V1.11.1/Drivers/STM32H7xx_HAL_Driver/Src/stm32h7xx_hal.c"是要编译的源文件路径。
3). 目标 CPU:-mcpu=cortex-m7指定了目标 CPU 是 Cortex-M7。
4). C 标准:-std=gnu11指定了使用 GNU 11 标准的 C 语言。
5). 调试信息:-g3设置了调试信息的级别。
6). 定义宏:-DDEBUG,-DUSE_HAL_DRIVER,-DSTM32H723xx,-DSTM32_THREAD_SAFE_STRATEGY=2等定义了编译时使用的宏。
7). 编译到目标文件:-c选项告诉编译器只编译源文件,不执行链接操作,生成目标文件(.o文件)。
8). 包含目录:-I选项后面跟着的是包含头文件的目录路径。
9). 优化级别:-O0表示不进行优化。
10). 函数和数据段:-ffunction-sections -fdata-sections允许链接器丢弃未使用的函数和数据。
11). 警告和错误:-Wall打开所有常用的警告。
12). 其他编译器选项:-fstack-usage,-fcyclomatic-complexity等是额外的编译器选项,用于生成栈使用情况和圈复杂度等信息。
13). 依赖生成:-MMD -MP -MF"Drivers/STM32H7xx_HAL_Driver/stm32h7xx_hal.d" -MT"Drivers/STM32H7xx_HAL_Driver/stm32h7xx_hal.o"是用于生成依赖文件的选项。
14). 规格文件:--specs=nano.specs使用了nano.specs链接器规格文件,这通常用于嵌入式系统以减小生成的代码大小。
15). 浮点单元和 ABI:-mfpu=fpv5-d16 -mfloat-abi=hard设置了浮点单元和浮点 ABI(应用程序二进制接口)。
16). Thumb 模式:-mthumb告诉编译器使用 Thumb 指令集(一种 16 位/32 位混合的 ARM 指令集)。
17). 输出文件:-o "Drivers/STM32H7xx_HAL_Driver/stm32h7xx_hal.o"指定了生成的目标文件路径和名称。 -
gcc -o "h723.elf" @"objects.list"
arm-none-eabi-gcc -o "h723.elf" @"objects.list" -mcpu=cortex-m7 -T"E:\st_workspace\h723\STM32H723VETX_FLASH.ld" --specs=nosys.specs -Wl,-Map="h723.map" -Wl,--gc-sections -static --specs=nano.specs -mfpu=fpv5-d16 -mfloat-abi=hard -mthumb -u _printf_float -Wl,--start-group -lc -lm -Wl,--end-group1).@"objects.list":包含要链接的所有目标文件的列表。
2).-T"E:\st_workspace\h723\STM32H723VETX_FLASH.ld":指定链接脚本文件,它定义了内存布局和段分配。
3).--specs=nosys.specs:使用 nosys.specs 链接器规格文件,这通常用于不包含标准 C 库(如 libc)的嵌入式系统。
4).-Wl,-Map="h723.map":生成链接映射文件。
5).-Wl,--gc-sections:允许链接器丢弃未使用的段。
6).-static:尝试静态链接所有库(但在这个上下文中可能有些混淆,因为通常与嵌入式系统不兼容)。
7).--specs=nano.specs(再次指定):这在此上下文中可能是多余的,因为通常只会在编译或链接的某个阶段指定一次。
8).-u _printf_float:强制链接器包含 _printf_float 符号,这通常与浮点数打印有关。
9).-Wl,--start-group -lc -lm -Wl,--end-group:将 libc 和 libm 库放在链接器组中,以确保它们之间的循环依赖被正确解析。 -
arm-none-eabi-size h723.elf
-
arm-none-eabi-objdump -h -S h723.elf > "h723.list"
四、总结
-
mpu编译和链接由gcc完成(Makefile、sh、/lib)
-
mcu编译和链接由IDE完成
-
处于mcu与mpu中间的如RZT2/N2、STM32H7、iMXRT116需要重点关注链接过程


魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 20
20 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)