opencv4+dnn+yolov8识别中国象棋
【代码】opencv4+dnn+yolov8识别中国象棋。
·
opencv4+dnn+yolov8识别中国象棋
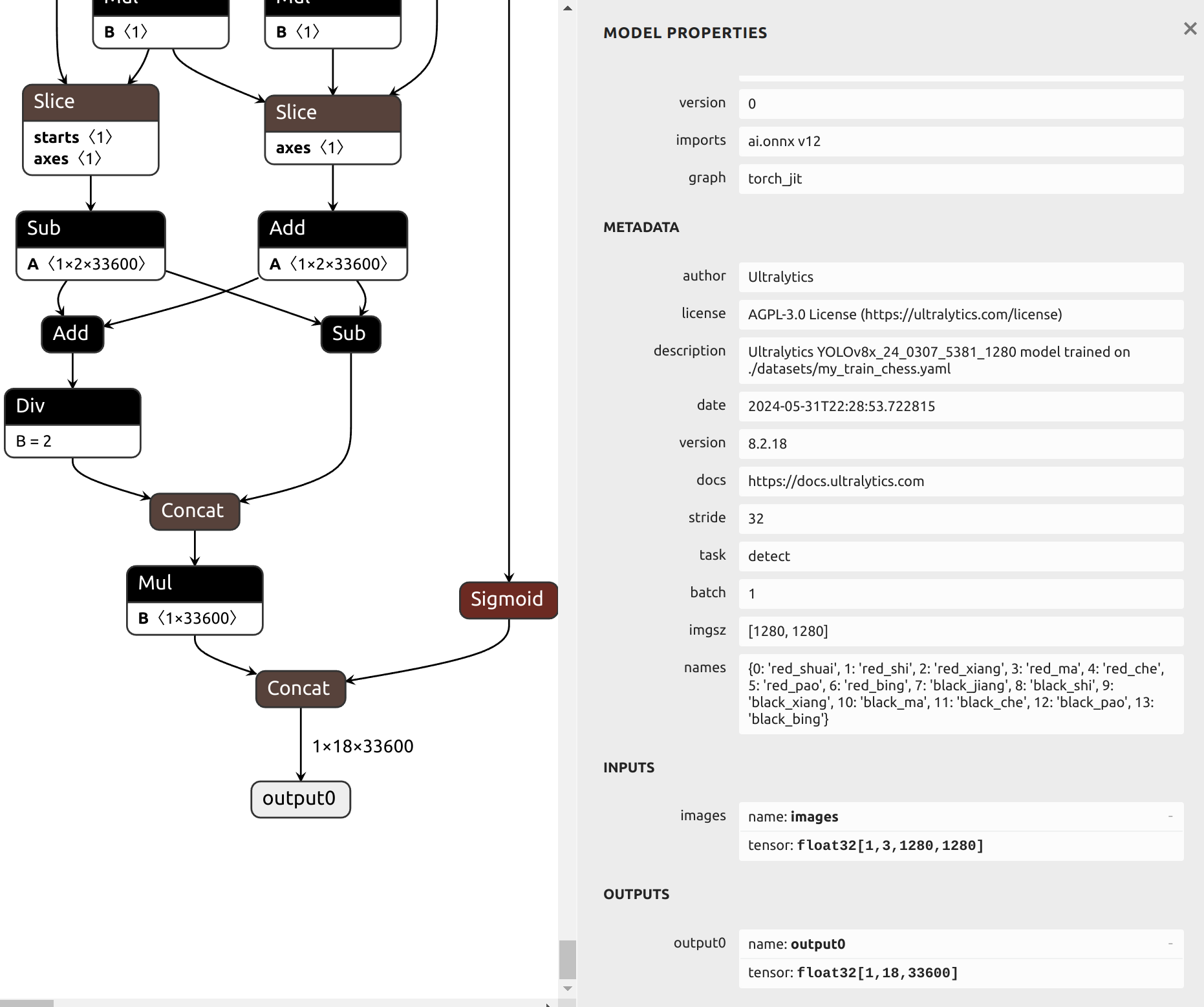
yolov8 pt模型转onnx模型
yolo export model=./weights/yolov8x_24_0307_5381_1280.pt format=onnx dynamic=False opset=12


代码
main.cpp
#include "opencv2/opencv.hpp"
#include <fstream>
#include <sstream>
#include <random>
using namespace cv;
using namespace dnn;
float inpWidth;
float inpHeight;
float confThreshold, scoreThreshold, nmsThreshold;
std::vector<std::string> classes;
std::vector<cv::Scalar> colors;
bool letterBoxForSquare = true;
cv::Mat formatToSquare(const cv::Mat &source);
void postprocess(Mat &frame, cv::Size inputSz, const std::vector<Mat> &out, Net &net);
void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat &frame);
std::random_device rd;
std::mt19937 gen(rd());
std::uniform_int_distribution<int> dis(100, 255);
int main()
{
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);;
String modelPath = "model.onnx";
String classesFile = "my_classes.txt";
// Open a video file or an image file or a camera stream.
VideoCapture cap;
cap.open(R"(data/IMG_1779.jpg)");
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
// 根据选择的检测模型文件进行配置
confThreshold = 0.25;
scoreThreshold = 0.45;
nmsThreshold = 0.5;
float scale = 1 / 255.0; // 0.00392
Scalar mean = {0, 0, 0};
bool swapRB = true;
inpWidth = 1280;
inpHeight = 1280;
String configPath;
String framework = "";
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
// int backendId = cv::dnn::DNN_BACKEND_OPENCV;
// int targetId = cv::dnn::DNN_TARGET_CPU; //cpu 350ms, opencl 310
int backendId = cv::dnn::DNN_BACKEND_CUDA;
int targetId = cv::dnn::DNN_TARGET_CUDA; // cuda 15ms
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
// Open file with classes names.
if (!classesFile.empty())
{
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
const std::string &file = classesFile;
std::ifstream ifs(file.c_str());
if (!ifs.is_open())
CV_Error(Error::StsError, "File " + file + " not found");
std::string line;
while (std::getline(ifs, line))
{
classes.push_back(line);
colors.push_back(cv::Scalar(dis(gen), dis(gen), dis(gen)));
}
}
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
// Load a model.
Net net = readNet(modelPath, configPath, framework);
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
net.setPreferableBackend(backendId);
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
net.setPreferableTarget(targetId);
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
std::vector<String> outNames = net.getUnconnectedOutLayersNames();
// std::vector<String> outNames{"output"};
if (backendId == cv::dnn::DNN_BACKEND_CUDA)
{
int dims[] = {1, 3, inpHeight, inpWidth};
cv::Mat tmp = cv::Mat::zeros(4, dims, CV_32F);
std::vector<cv::Mat> outs;
net.setInput(tmp);
for (int i = 0; i < 10; i++)
net.forward(outs, outNames); // warmup
}
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
// Create a window
static const std::string kWinName = "Deep learning object detection in OpenCV";
cv::namedWindow(kWinName, 0);
cv::TickMeter tk;
// Process frames.
Mat frame, blob;
while (waitKey(1) < 0)
{
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
// tk.reset();
// tk.start();
cap >> frame;
if (frame.empty())
{
waitKey();
break;
}
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
// Create a 4D blob from a frame.
cv::Mat modelInput = frame;
if (letterBoxForSquare && inpWidth == inpHeight)
modelInput = formatToSquare(modelInput);
blobFromImage(modelInput, blob, scale, cv::Size2f(inpWidth, inpHeight), mean, swapRB, false);
// Run a model.
net.setInput(blob);
std::vector<Mat> outs;
// tk.reset();
// tk.start();
auto tt1 = cv::getTickCount();
net.forward(outs, outNames);
auto tt2 = cv::getTickCount();
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
tk.stop();
postprocess(frame, modelInput.size(), outs, net);
// tk.stop();
// Put efficiency information.
// std::vector<double> layersTimes;
// double freq = getTickFrequency() / 1000;
// double t = net.getPerfProfile(layersTimes) / freq;
// std::string label = format("Inference time: %.2f ms (%.2f ms)", t, /*tk.getTimeMilli()*/ (tt2 - tt1) /
// cv::getTickFrequency() * 1000);
std::string label = format("Inference time: %.2f ms", (tt2 - tt1) / cv::getTickFrequency() * 1000);
cv::putText(frame, label, Point(0, 15), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 0));
// printf("\r%s\t", label.c_str());
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
cv::imshow(kWinName, frame);
namedWindow(kWinName, 0); // 参数为零,则可以自由拖动
imshow(kWinName, frame);
waitKey(10);
imwrite("1.jpg", frame);
}
printf("[%s][%d] 运行到行号\n", __FUNCTION__, __LINE__);
return 0;
}
cv::Mat formatToSquare(const cv::Mat &source)
{
int col = source.cols;
int row = source.rows;
int _max = MAX(col, row);
cv::Mat result = cv::Mat::zeros(_max, _max, CV_8UC3);
source.copyTo(result(cv::Rect(0, 0, col, row)));
return result;
}
void postprocess(Mat &frame, cv::Size inputSz, const std::vector<Mat> &outs, Net &net)
{
// yolov8 has an output of shape (batchSize, 84, 8400) (Num classes + box[x,y,w,h] + confidence[c])
auto tt1 = cv::getTickCount();
float x_factor = inputSz.width / inpWidth;
float y_factor = inputSz.height / inpHeight;
std::vector<int> class_ids;
std::vector<float> confidences;
std::vector<cv::Rect> boxes;
// int rows = outs[0].size[1];
// int dimensions = outs[0].size[2];
// [1, 84, 8400] -> [8400,84]
int rows = outs[0].size[2];
int dimensions = outs[0].size[1];
auto tmp = outs[0].reshape(1, dimensions);
cv::transpose(tmp, tmp);
float *data = (float *)tmp.data;
for (int i = 0; i < rows; ++i)
{
// float confidence = data[4];
// if(confidence >= confThreshold) {
float *classes_scores = data + 4;
cv::Mat scores(1, classes.size(), CV_32FC1, classes_scores);
cv::Point class_id;
double max_class_score;
minMaxLoc(scores, 0, &max_class_score, 0, &class_id);
if (max_class_score > scoreThreshold)
{
confidences.push_back(max_class_score);
class_ids.push_back(class_id.x);
float x = data[0];
float y = data[1];
float w = data[2];
float h = data[3];
int left = int((x - 0.5 * w) * x_factor);
int top = int((y - 0.5 * h) * y_factor);
int width = int(w * x_factor);
int height = int(h * y_factor);
boxes.push_back(cv::Rect(left, top, width, height));
}
//}
data += dimensions;
}
std::vector<int> indices;
NMSBoxes(boxes, confidences, scoreThreshold, nmsThreshold, indices);
auto tt2 = cv::getTickCount();
std::string label = format("NMS time: %.2f ms", (tt2 - tt1) / cv::getTickFrequency() * 1000);
cv::putText(frame, label, Point(0, 30), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 0));
for (size_t i = 0; i < indices.size(); ++i)
{
int idx = indices[i];
Rect box = boxes[idx];
drawPred(class_ids[idx], confidences[idx], box.x, box.y, box.x + box.width, box.y + box.height, frame);
}
}
void drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat &frame)
{
rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 255, 0));
std::string label = format("%.2f", conf);
Scalar color = Scalar::all(255);
if (!classes.empty())
{
CV_Assert(classId < (int)classes.size());
label = classes[classId] + ": " + label;
color = colors[classId];
}
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
rectangle(frame, Point(left, top - labelSize.height), Point(left + labelSize.width, top + baseLine), color, FILLED);
cv::putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.5, Scalar());
}
my_classes.txt
red_shuai
red_shi
red_xiang
red_ma
red_che
red_pao
red_bing
black_jiang
black_shi
black_xiang
black_ma
black_che
black_pao
black_bing
编译
g++ -o main main.cpp `pkg-config opencv4 --cflags --libs`
运行
./main

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐
 1
1 0
0- 0



 已为社区贡献12条内容
已为社区贡献12条内容

所有评论(0)