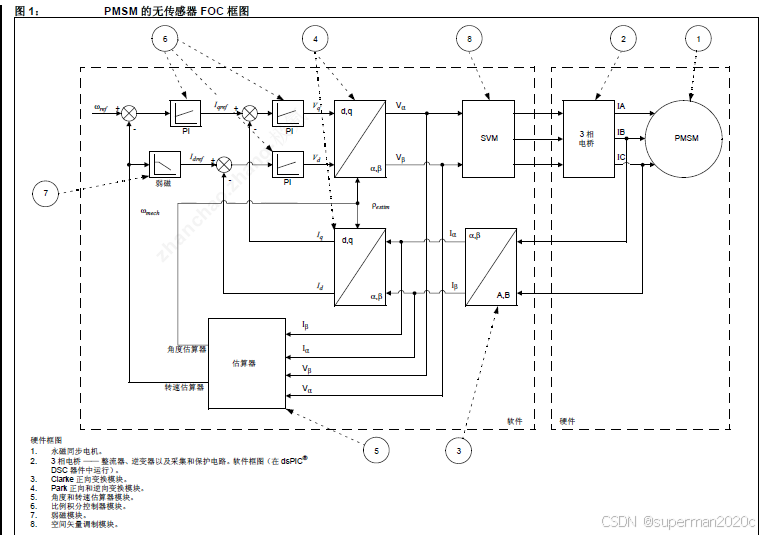
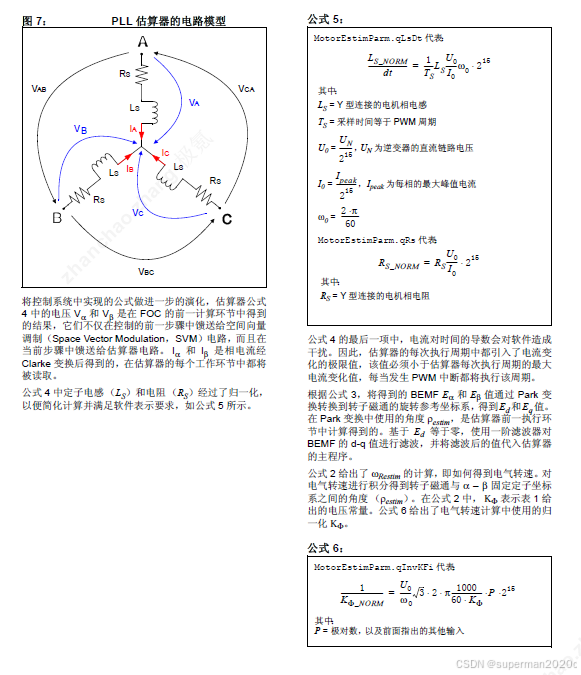
利用PLL 估算器和弱磁技术(FW)实现永磁同步电机(PMSM)的无传感器磁场定向控制(FOC)
三相永磁同步电机无位置矢量控制
对PMSM 进行FOC 的特别之处在于:定子的d 轴基准
电流Idref (对应于d 轴上的电枢反应磁通)设置为零。
转子磁体产生转子磁链ΨPM。这与ACIM 不同, ACIM
需要磁化电流具有恒定的基准电流值Idref,才能产生转
子磁链。
气隙磁通等于永磁体产生的转子磁链与定子电流产生的
电枢反应磁链的和。对于FOC 的恒定转矩模式,d 轴气
隙磁通仅与ΨPM 相等, d 轴电枢反应磁通为零。
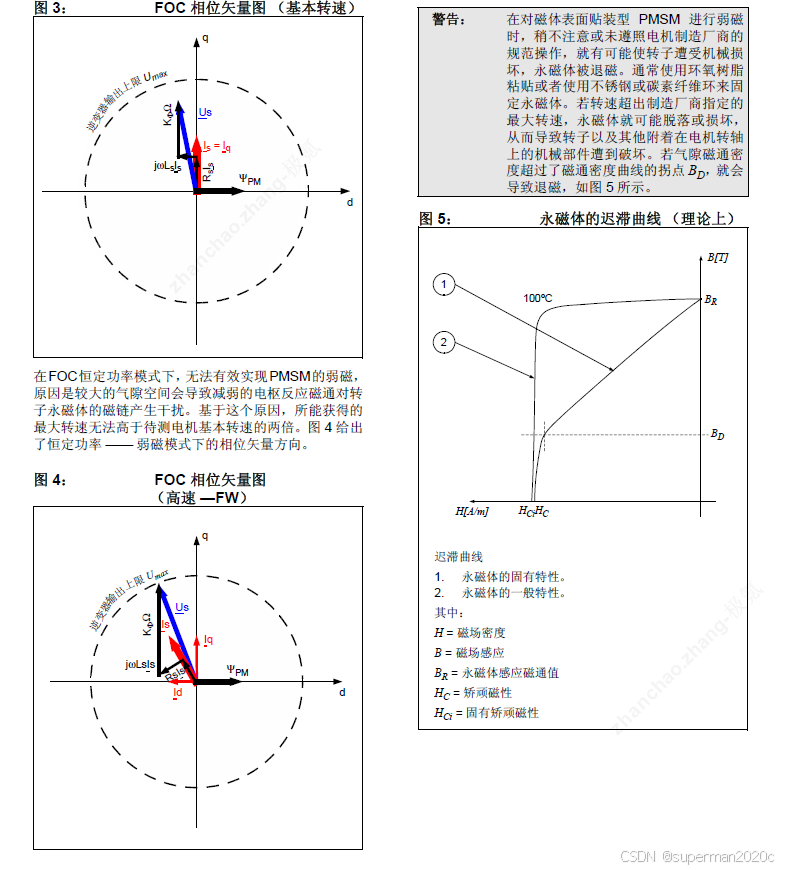
与此相对,在恒定功率运行时,定子电流的励磁分量Id
用于削弱气隙磁场,从而提高转速。
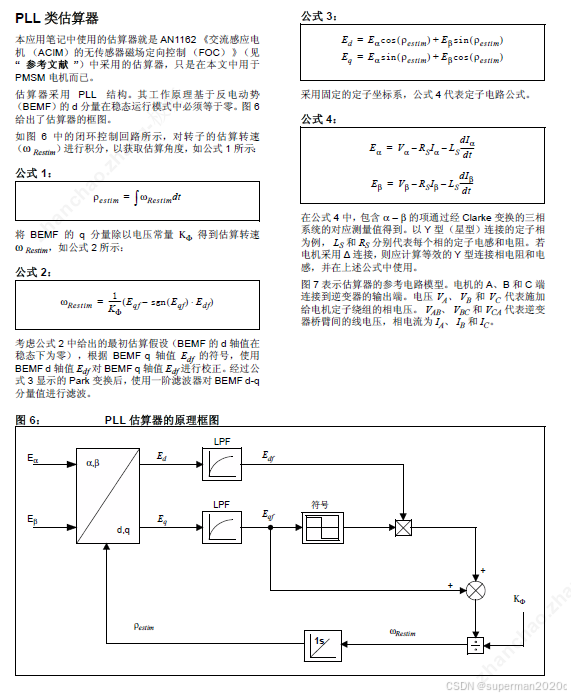
在无需位置或速度传感器的无传感器控制中,主要的困
难是实现一个稳健的速度估算器,能够抵御温度、电磁
噪声等干扰。对于成本非常敏感或不允许有诸如位置传
感器等移动部件的应用或者电机在电气条件非常恶劣的
环境下运行时,通常需要采用无传感器控制。然而,不
应将对精确控制的要求,特别是低速时的要求,当作就
给定应用选择控制方案的关键因素。
根据电机的数学模型进行位置和速度估算。因此,模型
越接近真实硬件,估算器的执行效果就越好。PMSM 的
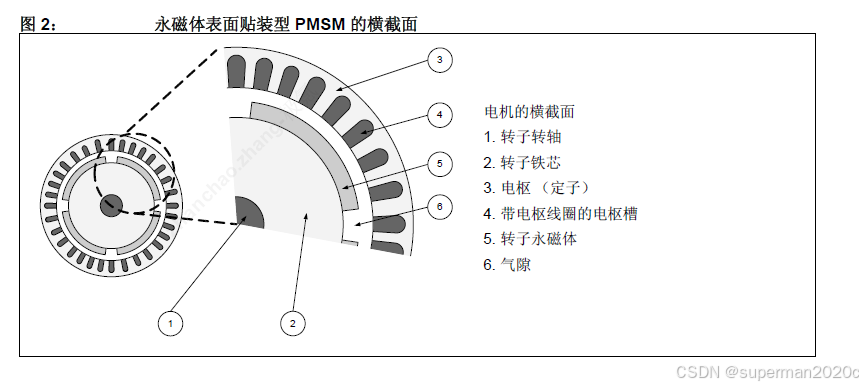
数学建模取决于其拓扑结构,主要分为两类:表面贴装
型和内部贴装型永磁体。针对应用的需求,这两个类均
有其优缺点。围绕表面贴装型永磁同步电机开发了相应
的控制方案(图2),与其他类型的PMSM 相比,其优
点是转矩纹波低、价格低。表面贴装型PMSM 的气隙磁
通比较平滑,因此定子的电感值Ld = Lq (非凸极
PMSM),且反电动势(Back Electromagnetic Force,
BEMF)呈正弦波。
由于此类PMSM 的气隙(包含置于定子齿和转子铁芯
之间的表面贴装磁体)较大,此类PMSM 相对于具有同
样尺寸和标称功率值的其他类电机,具有更小的感应系
数。电机的这些特性在一定程度上简化了速度和位置估
算器使用的数学模型,同时使得FOC 更有效。
持续保持电机转子的磁链滞后电枢磁链90 度可以获得
每安培的FOC 转矩最大(见图3)。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐
 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)