【数据结构和算法设计】算法篇(10) 计算几何(3) 凸包问题
10.2 求解凸包问题简单多边形分凸多边形和凹多边形两类,凸多边形是没有任何“凹陷处”的,而凹多边形至少有一个顶点处于“凹陷处”(称为凹点)。凸多边形上任意两个顶点的连线,都包含在多边形中;凹多边形中总能找到一对顶点,它们的连线有一部分在多边形外。沿着凸多边形周边移动,在每个顶点的转向都是相同的;对于凹多边形,一些是向右转,一些是向左转,在凹点的转向是相反的。图10.12所示的多边形是一个凸多边形
10.2 求解凸包问题
简单多边形分凸多边形和凹多边形两类,凸多边形是没有任何“凹陷处”的,而凹多边形至少有一个顶点处于“凹陷处”(称为凹点)。凸多边形上任意两个顶点的连线,都包含在多边形中;凹多边形中总能找到一对顶点,它们的连线有一部分在多边形外。沿着凸多边形周边移动,在每个顶点的转向都是相同的;对于凹多边形,一些是向右转,一些是向左转,在凹点的转向是相反的。图10.12所示的多边形是一个凸多边形,而图10.11所示的多边形是一个凹多边形。
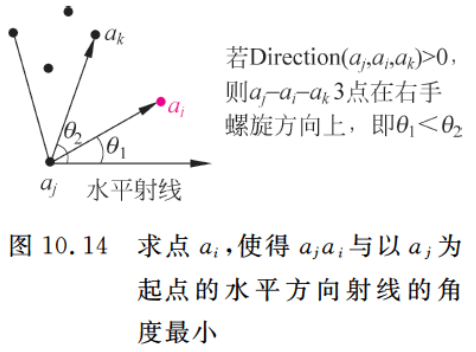
点集 AAA 的凸包 Convex Hull 是指一个最小凸多边形,满足 AAA 中的点或者在多边形边上、或者在其内。也就是说,AAA 点集中任意两点的连线都在其内的点集,就是一个凸包(任意两点的连线都在 AAA 点集内的点集就是一个凸包)。
图10.13所示的二维平面上有 101010 个点,即有这些测试数据:a0(4,10), a1(3,7), a2(9,7), a3(3,4), a4(5,6), a5(5,4), a6(6,3),a7(8,1), a8(3,0), a9(1,6)a_0(4, 10),\ a_1(3, 7),\ a_2(9, 7),\ a_3(3, 4),\ a_4(5, 6),\ a_5(5, 4),\ a_6(6, 3),\\ a_7(8, 1),\ a_8(3, 0),\ a_9(1, 6)a0(4,10), a1(3,7), a2(9,7), a3(3,4), a4(5,6), a5(5,4), a6(6,3),a7(8,1), a8(3,0), a9(1,6) ,其凸包是由点 a0,a2,a7,a8,a9a_0, a_2, a_7, a_8, a_9a0,a2,a7,a8,a9 构成的。
求一个点集的凸包,是计算几何的一个基本问题,目前有多种求解算法,这里主要介绍两种求凸包的算法。
10.2.1 礼品包裹算法
这种算法也称卷包裹算法,原理比较简单——先找一个最边缘的点(一般是最左边的点,如果有多个这样的点,则选择最下方的点)。假设有一条绳子,以该点为端点、向右边逆时针旋转、直到碰到另一个点为止,此时找到凸包的一条边;然后用新找到的点作为端点,继续旋转绳子,找到下一个端点;重复这一步骤,直到回到最初的点,此时围成一个凸多边形,所选出的点集就是所要求的凸包。
对于给定的 nnn 个点 a[0...n−1]a[0...n-1]a[0...n−1] ,求解的凸包顶点序列存放在凸包数组 chchch 中,其步骤如下:
- 从所有点中求出最左边的最低点 aja_jaj(xxx 坐标最小者,若有多个这样的点,选其中 yyy 坐标最小者),置 tmp=jtmp = jtmp=j 。
- 将点编号 jjj 作为凸包中的一个顶点编号,存放到 chchch 中。
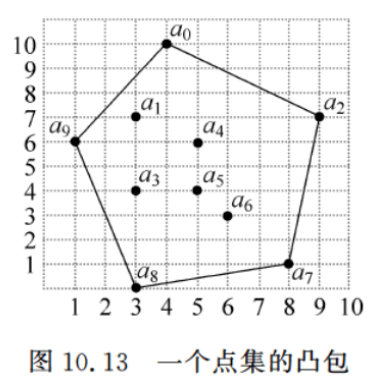
- 对于点 aja_jaj ,找一个点 aia_iai ,使得 ajaia_ja_iajai 与以 aja_jaj 为起点的水平方向射线的角度最小,如图10.14所示。若存在两个点 aia_iai 和 aka_kak ,并有 aj,ai,aka_j, a_i, a_kaj,ai,ak 三点共线,则选取离 aja_jaj 最远的点 aia_iai ,令 j=ij = ij=i 。确切地说,这里对于点 aja_jaj ,选取的是某个点 aia_iai ,使得 ajaia_ja_iajai 位于「aja_jaj 与所有其他点的连线」的顺时针方向。emmm……反正自己领悟就是了。
- 对于新的点 aja_jaj ,重复第 333 步。当 j=tmpj = tmpj=tmp 时,表示已求出凸包顶点序列 chchch ,算法结束。
对于图10.13所示的点集 aaa ,采用礼品包裹算法求凸包的过程如下:
- 选取最左边的最下点 a9a_9a9 。
- 当前点为 a9a_9a9 ,从 a9a_9a9 出发,在其余所有点中找到角度最小的点 a8a_8a8 。
- 当前点为 a8a_8a8 ,从 a8a_8a8 出发,在其余所有点中找到角度最小的点 a7a_7a7 ;
- 当前点为 a7a_7a7 ,从 a7a_7a7 出发,在其余所有点中找到角度最小的点 a2a_2a2 ;
- 当前点为 a2a_2a2 ,从 a2a_2a2 出发,在其余所有点中找到角度最小的点 a0a_0a0 ;
- 当前点为 a0a_0a0 ,从 a0a_0a0 出发,在其余所有点中找到角度最小的点 a9a_9a9 ;
- 回到起点,算法结束。找到的凸包顶点序列是 a9,a8,a7,a2,a0a_9, a_8, a_7, a_2, a_0a9,a8,a7,a2,a0 。
采用礼品包裹算法,求解图10.13中凸包的完整程序如下:
#include "Point.cpp"
const int MAXN = 1000;
bool cmp(Point aj, Point ai, Point ak) { // 比较两个向量方向的函数
int d = Direction(aj, ai, ak); // 调用Direction()
if (d == 0) // 共线时,若ajai更长则返回true
return Distance(aj, ak) < Distance(aj, ai);
else if (d > 0) // ajai在ajak的顺时针方向上,返回true
return true;
else // 否则返回false
return false;
}
// 礼品包裹算法
void Package(vector<Point> a, vector<int> &ch) {
int i, j = 0, k, tmp;
for (int i = 1; i < a.size(); ++i)
if (a[i].x < a[j].x || (a[i].x == a[j].x && a[i].y < a[j].y))
j = i; // 找到最左边的最低点
tmp = j; // tmp保存凸包顶点序列的起点
while (true) {
k = -1;
ch.push_back(j); // 顶点aj作为凸包上的一个点
for (i = 0; i < a.size(); ++i)
if (i != j && (k == -1 || cmp(a[j], a[i], a[k])))
// 说明ajai与以aj为起点的水平射线的角度小于ajak与其的角度
k = i; // 从aj出发找角度最小的点ai
if (k == tmp) break; // 找到起点时结束
j = k;
}
}
int main() {
vector<Point> a;
a.push_back(Point(4, 10));
a.push_back(Point(3, 7));
a.push_back(Point(9, 7));
a.push_back(Point(3, 4));
a.push_back(Point(5, 6));
a.push_back(Point(5, 4));
a.push_back(Point(6, 3));
a.push_back(Point(8, 1));
a.push_back(Point(3, 0));
a.push_back(Point(1, 6));
Point st[MAXN];
vector<int> ch;
Package(a, ch);
printf("求解结果\n");
printf("凸包的顶点: ");
for (const int &v : ch) printf("%d ", v);
printf("\n");
return 0;
}
运行结果如下所示:
10.2.2 GrahamGrahamGraham 扫描法
GrahamGrahamGraham 扫描法(葛立恒扫描法)的原理是,沿逆时针方向通过凸包时,在每个点处应该向左拐,而删除出现右拐的点。可通过设置一个关于候选点的栈 chchch 来解决凸包。输入点集 AAA 中的每个点都进栈一次,非凸包中的顶点最终将出栈,当算法终止时栈中仅包含凸包中的点,其顺序为「各点在边界上出现的、逆时针方向排列」的顺序。
对于给定的 nnn 个点 a[0...n−1]a[0...n-1]a[0...n−1] ,GrahamGrahamGraham 扫描法求凸包的步骤如下:
- 从所有点中找到最下且偏左的点 a[k]a[k]a[k](yyy 坐标最小者,若有多个这样的点,选其中 xxx 坐标最小者)。通过交换,将 a[k]a[k]a[k] 放到 a[0]a[0]a[0] 中,并置全局变量 p0=a[0]p_0 = a[0]p0=a[0] 。
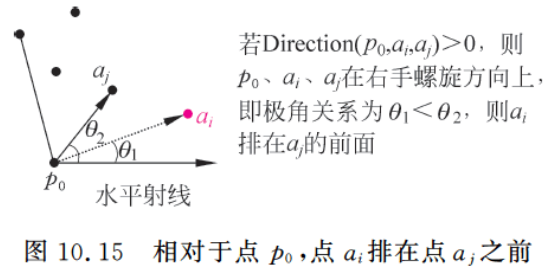
- 对 aaa 中的所有点,按以 p0p_0p0 为中心的极角从小到大排序。如图10.15所示,对于两个点 ai,aja_i, a_jai,aj ,若 Direction(p0,ai,aj)>0Direction(p_0, a_i, a_j) > 0Direction(p0,ai,aj)>0 ,点 aia_iai 排在点 aja_jaj 的前面;否则,点 aia_iai 排在点 aja_jaj 的后面。
- 在点集 aaa 排序后,先将 a[0],a[1],a[2]a[0], a[1], a[2]a[0],a[1],a[2] 三个点进栈到 chchch 中,因为一个凸包至少包含 333 个点。
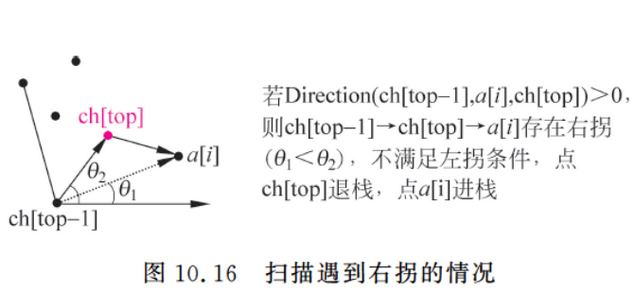
- 扫描点集 aaa 中余下的所有点(从 i=3i = 3i=3 开始)。若扫描点 a[i]a[i]a[i] ,栈顶点为 ch[top]ch[top]ch[top] ,次栈顶点为 ch[top−1]ch[top - 1]ch[top−1] ;若有 Direction(ch[top−1],a[i],ch[top])>0Direction(ch[top - 1], a[i], ch[top]) > 0Direction(ch[top−1],a[i],ch[top])>0 ,如图10.16所示,ch[top−1],ch[top]ch[top - 1],ch[top]ch[top−1],ch[top] 所成向量在 ch[top−1],a[i]ch[top - 1], a[i]ch[top−1],a[i] 的逆时针方向,即存在着右拐,则栈顶点 ch[top]ch[top]ch[top] 一定不是凸包中的点,将其退栈,如此循环、直到该条件不成立、或栈中少于(等于?)两个元素为止,然后将当前扫描点 a[i]a[i]a[i] 进栈。
对于图10.13所示的点集 aaa ,采用 GrahamGrahamGraham 扫描法求凸包的过程如下:
- 先求出起点 a8(3,0)a_8(3, 0)a8(3,0) ;
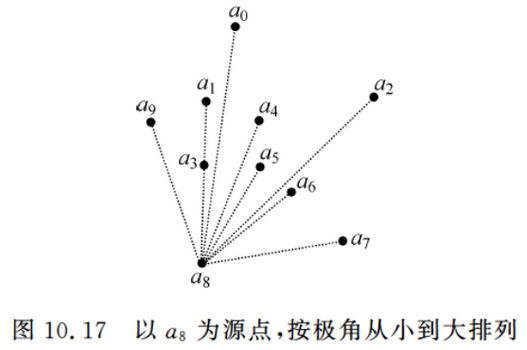
- 按极角从小到大排序后,得到 a8(3,0),a7(8,1),a6(6,3),a2(9,7),a5(5,4),a4(5,6),a0(4,10),a1(3,7),a3(3,4),a9(1,6)a_8(3, 0), a_7(8, 1), a_6(6, 3), a_2(9, 7), a_5(5, 4), a_4(5, 6), a_0(4, 10), a_1(3, 7), a_3(3, 4), a_9(1, 6)a8(3,0),a7(8,1),a6(6,3),a2(9,7),a5(5,4),a4(5,6),a0(4,10),a1(3,7),a3(3,4),a9(1,6) ,如图10.17所示;
- 将 a8,a7,a6a_8, a_7, a_6a8,a7,a6 三个点进栈,栈中元素从栈底到栈顶为 a8,a7,a6a_8, a_7, a_6a8,a7,a6 。
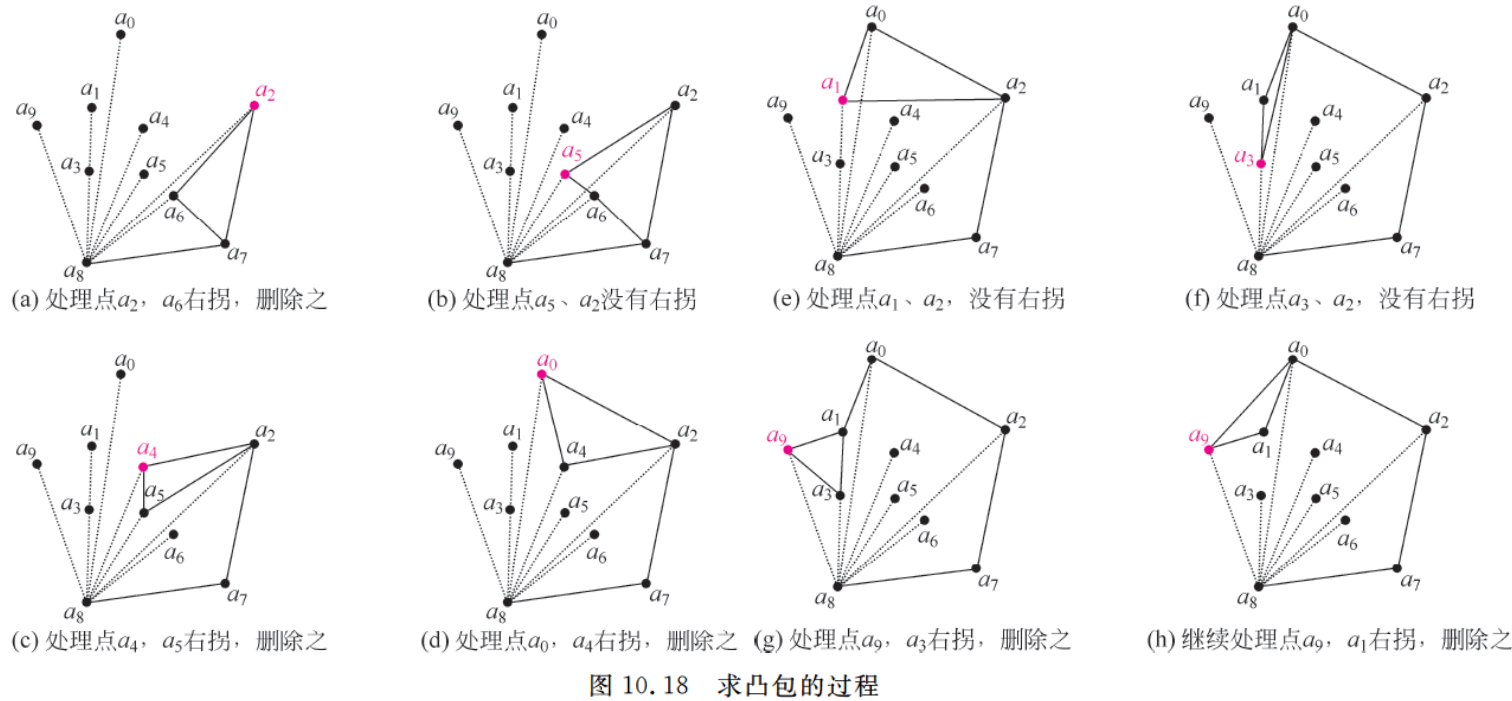
- 处理点 a2a_2a2 :点 a6a_6a6 存在右拐关系(a7,a2,a6a_7, a_2, a_6a7,a2,a6 在右手螺旋方向上),将其退栈,如图10.18(a)所示,点 a2a_2a2 进栈。栈中元素从栈底到栈顶为 a8,a7,a2a_8, a_7, a_2a8,a7,a2 。
- 处理点 a5a_5a5 :a7,a5,a2a_7, a_5, a_2a7,a5,a2 在左手螺旋方向上,不存在右拐关系,如图10.18(b)所示,点 a5a_5a5 进栈。栈中元素从栈底到栈顶为 a8,a7,a2,a5a_8, a_7, a_2, a_5a8,a7,a2,a5 。
- 处理点 a4a_4a4 :点 a5a_5a5 存在右拐关系(a2,a4,a5a_2, a_4, a_5a2,a4,a5 在右手螺旋方向上),将其退栈,如图10.18 c)所示,点 a4a_4a4 进栈。栈中元素从栈底到栈顶为 a8,a7,a2,a4a_8, a_7, a_2, a_4a8,a7,a2,a4 。
- 处理点 a0a_0a0 :点 a4a_4a4 存在右拐关系(a2,a0,a4a_2, a_0, a_4a2,a0,a4 在右手螺旋方向上),将其退栈,如图10.18(d)所示,点 a0a_0a0 进栈。栈中元素从栈底到栈顶为 a8,a7,a2,a0a_8, a_7, a_2, a_0a8,a7,a2,a0 。
- 处理点 a1a_1a1 :a2,a1,a0a_2, a_1, a_0a2,a1,a0 在左手螺旋方向上,不存在右拐关系,如图10.18(e)所示,点 a1a_1a1 进栈。栈中元素从栈底到栈顶为 a8,a7,a2,a0,a1a_8, a_7, a_2, a_0, a_1a8,a7,a2,a0,a1 。
- 处理点 a3a_3a3 :a0,a3,a1a_0, a_3, a_1a0,a3,a1 在左手螺旋方向上,不存在右拐关系,如图10.18(f)所示,点 a3a_3a3 进栈。栈中元素从栈底到栈顶为 a8,a7,a2,a0,a1,a3a_8, a_7, a_2, a_0, a_1, a_3a8,a7,a2,a0,a1,a3 。
- 处理点 a9a_9a9 :点 a3a_3a3 存在右拐关系(a1,a9,a3a_1, a_9, a_3a1,a9,a3 在右手螺旋方向上),将其退栈,如图10.18(g)所示;点 a1a_1a1 存在右拐关系(a0,a9,a1a_0, a_9, a_1a0,a9,a1 在右手螺旋方向上),将其退栈,如图10.18(h)所示;点 a9a_9a9 进栈。栈中元素从栈底到栈顶为 a8,a7,a2,a0,a9a_8, a_7, a_2, a_0, a_9a8,a7,a2,a0,a9 。
- 最后求出逆时针方向的凸包为 a8(3,0), a7(8,1), a2(9,7), a0(4,10), a9(1,6)a_8(3, 0),\ a_7(8, 1),\ a_2(9, 7),\ a_0(4, 10),\ a_9(1, 6)a8(3,0), a7(8,1), a2(9,7), a0(4,10), a9(1,6) 。
采用 GrahamGrahamGraham 扫描法求解图10.13中凸包的完整程序如下:
#include "Point.cpp"
const int MAXN = 1000;
Point p0; // 起点,全局变量
void swap(Point &x, Point &y) { // 交换x,y两个点
Point tmp = x; x = y; y = tmp;
}
bool cmp(Point &a, Point &b) { // 排序比较关系函数
return (Direction(p0, a, b) > 0); // 如果p0a在p0b的顺时针方向,则返回true,否则返回false
}
int Graham(vector<Point> &a, Point ch[]) { // 求凸包的Graham算法
int top = -1, i, k = 0;
for (i = 1; i < a.size(); ++i)
if (a[i].y < a[k].y || (a[i].y == a[k].y && a[i].x < a[k].x))
k = i; // 找最下且偏左的点a[k]
swap(a[0], a[k]); // 通过交换将a[k]点指定为起点a[0]
p0 = a[0]; // 将起点a[0]放入p0中
sort(a.begin() + 1, a.end(), cmp); // 按极角从小到大排序
top++; ch[0] = a[0];
top++; ch[1] = a[1];
top++; ch[2] = a[2];
for (i = 3; i < a.size(); ++i) { // 判断与其余所有点的关系
while (top >= 0 && // 准确的说是top>=2,因为栈中至少要有两个顶点
(Direction(ch[top - 1], a[i], ch[top]) > 0 ||
Direction(ch[top - 1], a[i], ch[top]) == 0 &&
Distance(ch[top - 1], a[i]) > Distance(ch[top - 1], ch[top]))
) top--; // 存在右拐关系,栈顶元素出栈
top++; ch[top] = a[i]; // 当前点与栈内所有点满足向左关系,进栈
}
return top + 1; // 返回栈中元素个数
}
int main() {
vector<Point> a;
a.push_back(Point(4, 10));
a.push_back(Point(3, 7));
a.push_back(Point(9, 7));
a.push_back(Point(3, 4));
a.push_back(Point(5, 6));
a.push_back(Point(5, 4));
a.push_back(Point(6, 3));
a.push_back(Point(8, 1));
a.push_back(Point(3, 0));
a.push_back(Point(1, 6));
Point st[MAXN]; // 用作栈
int n = Graham(a, st);
printf("求解结果\n");
printf("凸包的顶点:");
for (int i = 0; i < n; ++i) { // 栈中所有元素为凸包
st[i].disp();
printf(" ");
}
printf("\n");
}
运行结果如下所示:
算法分析:对于 nnn 个点,上述 Graham(a,ch)Graham(a, ch)Graham(a,ch) 算法中排序过程的时间复杂度为 O(nlog2n)O(n\log_2 n)O(nlog2n) ,forforfor 循环次数少于 nnn ,所以整个算法的时间复杂度为 O(nlog2n)O(n\log_2 n)O(nlog2n) 。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 2
2 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)