逐行源码解析:Hybrid A*路径规划算法及其在泊车场景的应用——Matlab版
·
逐行hybrid astar路径规划 混合a星泊车路径规划 带你从头开始写hybridastar算法,逐行源码分析matlab版hybridastar算法
咱们今天唠唠混合A星(Hybrid A*)路径规划,这玩意儿在自动泊车场景用得贼溜。和传统A星最大的区别在于它能处理车辆运动学约束,说人话就是——车不是纸片人,不能原地转向,得按方向盘转动的实际轨迹走。
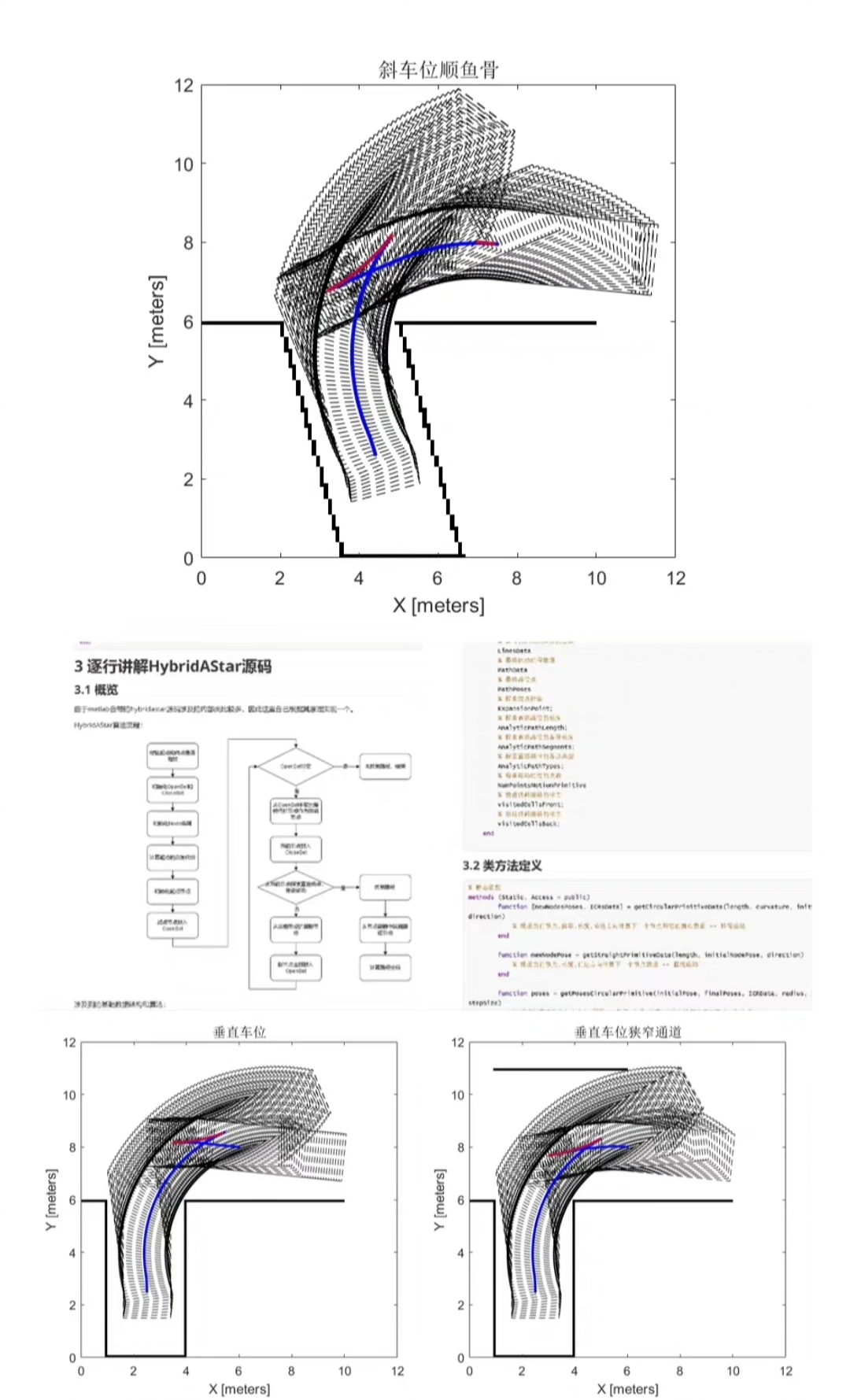
先看个典型场景:停车场里有个斜方形的空位,咱们要让车从入口位置倒车入库。这时候传统栅格A星规划的路径可能根本开不进去,而Hybrid A*生成的路径带转向弧度,这才是真能用的方案。
上代码!先定义车辆参数(Matlab版):
vehicle.length = 4.7; % 车长
vehicle.width = 1.8; % 车宽
vehicle.wheelbase = 2.8; % 轴距
vehicle.max_steer = deg2rad(40); % 最大转向角节点结构体是关键,得记录每个状态的位姿和运动轨迹:
function node = createNode(x, y, theta, steer, cost, parent)
node.x = x; % X坐标
node.y = y; % Y坐标
node.theta = theta; % 航向角(弧度)
node.steer = steer; % 当前转向角
node.cost = cost; % 累计代价
node.parent = parent;% 父节点索引
end扩展节点时得考虑车辆运动学,这里用自行车模型生成后继节点:
function successors = generateSuccessors(currentNode, vehicle)
steer_steps = [-vehicle.max_steer, 0, vehicle.max_steer]; % 左转/直行/右转
successors = [];
for steer = steer_steps
% 自行车模型计算新位姿
R = vehicle.wheelbase / tan(steer);
dtheta = 0.5 / R; % 步长0.5米对应的角度变化
new_theta = currentNode.theta + dtheta;
new_x = currentNode.x + 0.5 * cos(new_theta);
new_y = currentNode.y + 0.5 * sin(new_theta);
% 计算代价时加入转向惩罚
new_cost = currentNode.cost + 0.5 + 0.3*abs(steer);
successors = [successors;
createNode(new_x, new_y, new_theta, steer, new_cost, [])];
end
end重点来了——混合启发函数。传统A星用欧式距离,Hybrid A*得考虑航向角:
function h = heuristic(current, goal)
% 欧式距离部分
dx = goal.x - current.x;
dy = goal.y - current.y;
distance_cost = sqrt(dx^2 + dy^2);
% 航向角偏差惩罚
theta_diff = abs(wrapToPi(current.theta - atan2(dy, dx)));
angle_cost = theta_diff * 2; % 实验调整的权重
h = distance_cost + angle_cost;
end碰撞检测要同时考虑车体轮廓和障碍物膨胀区。这里用多边形相交检测:
function collision = checkCollision(node, map, vehicle)
% 构建车体四个角点
car_corners = computeCarCorners(node, vehicle);
% 转换为栅格坐标
[rows, cols] = size(map.obstacle);
for i = 1:4
x_idx = floor(car_corners(i,1)/map.resolution);
y_idx = floor(car_corners(i,2)/map.resolution);
if x_idx < 1 || x_idx > cols || y_idx < 1 || y_idx > rows
collision = true;
return
end
if map.obstacle(y_idx, x_idx) == 1
collision = true;
return
end
end
collision = false;
end实际跑算法时会出现路径抖动,得用二次优化平滑路径。分享个实用技巧:在找到路径后,用二次规划对节点进行弹性拉伸:
function smooth_path = pathSmoothing(raw_path)
alpha = 0.5; % 平滑权重
beta = 0.3; % 弹性权重
smooth_path = raw_path;
for iter = 1:100
for i = 2:length(raw_path)-1
dx = smooth_path(i+1).x - 2*smooth_path(i).x + smooth_path(i-1).x;
dy = smooth_path(i+1).y - 2*smooth_path(i).y + smooth_path(i-1).y;
move_x = alpha*(raw_path(i).x - smooth_path(i).x) + beta*dx;
move_y = alpha*(raw_path(i).y - smooth_path(i).y) + beta*dy;
smooth_path(i).x = smooth_path(i).x + move_x;
smooth_path(i).y = smooth_path(i).y + move_y;
end
end
end最后给个可视化效果对比:原始Hybrid A*路径可能像醉汉画的线,经过平滑处理后变成老司机操作的流畅曲线。实际部署时还要考虑方向盘转角速度限制,别让转向变化太突兀——毕竟乘客的咖啡杯可经不起突然打方向。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 5
5 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)