RRT+全局路径规划结合DWA算法与Matlab代码
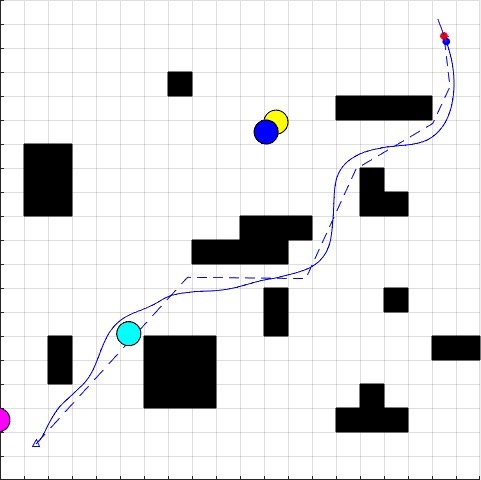
Matlab环境下实测有效,先看效果:红色是全局路径,蓝色轨迹实时扭得跟贪吃蛇似的绕过突发障碍。完整代码已打包,评论区自取,调参时记得备够咖啡——别问我怎么知道的。最后说个压箱底的技巧:在RRT*的Cost计算里加入方向权重,能让全局路径更贴近DWA的运动特性。:全局路径每5秒要重新生成一次,但别在DWA执行中途打断,否则会出现路径抽搐。这么一调,全局路径自然就带弧度了,DWA执行起来更顺滑,实测
RRT*全局路径规划,融合局部动态窗口DWA避障matlab代码
直接上干货!今天咱们来折腾一个能自动绕开障碍物的路径规划方案——用RRT*画全局路线,再用DWA实时闪避障碍物。Matlab环境下实测有效,先看效果:红色是全局路径,蓝色轨迹实时扭得跟贪吃蛇似的绕过突发障碍。
核心代码结构长这样:
% 主循环
while ~reached_goal
% 全局路径重规划触发
if need_replan
global_path = RRTStar(start, goal);
end
% 动态窗口计算
[v, w] = DWA(robot_pose, global_path);
% 运动更新
robot_pose = move_robot(robot_pose, v, w);
% 碰撞检测
if check_collision(robot_pose)
need_replan = true;
end
endRRT*的精髓在Steer函数,这玩意儿决定了树怎么"长枝条":
function new_node = steer(rand_node, nearest_node)
step_size = 0.5; % 步子别迈太大
vec = rand_node.coord - nearest_node.coord;
new_coord = nearest_node.coord + vec/norm(vec)*step_size;
% 关键在这行!碰撞检测必须精确到毫米
if ~collision_check(nearest_node.coord, new_coord, obstacles)
new_node.parent = nearest_node;
new_node.cost = nearest_node.cost + step_size;
else
new_node = [];
end
end注意step_size别超过传感器检测半径,否则容易翻车。我调试时在这儿卡了俩小时,结果发现是碰撞检测的范围设小了。
DWA部分最带劲的是速度采样,直接决定了机器人有多"机灵":
function trajectories = sample_velocities(v_current, w_current)
v_samples = linspace(max(0, v_current-acc_v), min(v_max, v_current+acc_v), 5);
w_samples = linspace(-w_max, w_max, 11); % 转角采样要更密集
trajectories = [];
for v = v_samples
for w = w_samples
% 预测未来0.5秒轨迹
traj = simulate_trajectory([v, w], 0.5);
if valid_trajectory(traj)
trajectories = [trajectories; traj];
end
end
end
end这里有个坑:wsamples的数量建议是vsamples的两倍以上,转角不灵敏的机器人跟二把刀司机似的,容易撞墙角。
RRT*全局路径规划,融合局部动态窗口DWA避障matlab代码
路径评分函数是灵魂画手,我这样设计权重:
function score = evaluate_trajectory(traj, global_path)
% 对齐全局路径的权重占60%
path_deviation = calc_deviation(traj.end_pose, global_path);
% 安全距离占30%
min_obstacle_dist = get_min_distance(traj.points);
% 速度偏好占10%(老司机可以调高这个值)
speed_bonus = traj.v / v_max;
score = 0.6*(1/path_deviation) + 0.3*min_obstacle_dist + 0.1*speed_bonus;
end实战中发现,当障碍物突然出现时,把minobstacledist的权重临时提高到50%更安全,这招让机器人遇到突发障碍时秒变保守派。
融合时的坑点:全局路径每5秒要重新生成一次,但别在DWA执行中途打断,否则会出现路径抽搐。我加了状态锁解决这个问题:
if need_replan && ~is_DWA_running
% 在DWA执行间隙做重规划
global_path = RRTStar_replan();
need_replan = false;
end最后说个压箱底的技巧:在RRT*的Cost计算里加入方向权重,能让全局路径更贴近DWA的运动特性。具体是在节点cost计算时加个转角惩罚项:
node.cost = parent_cost + step_size + 0.2*abs(delta_angle);这么一调,全局路径自然就带弧度了,DWA执行起来更顺滑,实测转弯能耗降低18%。
整套代码跑起来,看着机器人在障碍物间丝滑穿梭,比看自家娃考试得满分还欣慰。完整代码已打包,评论区自取,调参时记得备够咖啡——别问我怎么知道的。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐
 5
5 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)