四种RRT算法三维机械臂避障 只做球体障碍物 matlab机械臂路径规划仿真 《基于改进RRT...
源码已扔GitHub,调参时记得备好枸杞,三维路径规划这玩意,玄学起来能让你怀疑人生。RRT算法家族表示这题能解。咱们今天不整虚的,直接上Matlab撸代码,用球体障碍物当陪练,看看RRT、RRT-Connect、RRT。实测这个版本在复杂障碍环境里收敛速度提升明显,特别是当初始路径找到后,采样范围从整个空间缩到椭圆区域,相当于给算法开了导航。《基于改进RRT算法的六自由度六自由度机械臂避障路径规
四种RRT算法三维机械臂避障 只做球体障碍物 matlab机械臂路径规划仿真 《基于改进RRT算法的六自由度六自由度机械臂避障路径规划研究》第四章,第五章中三维空间机械臂避障。 基本与文中效果对应。
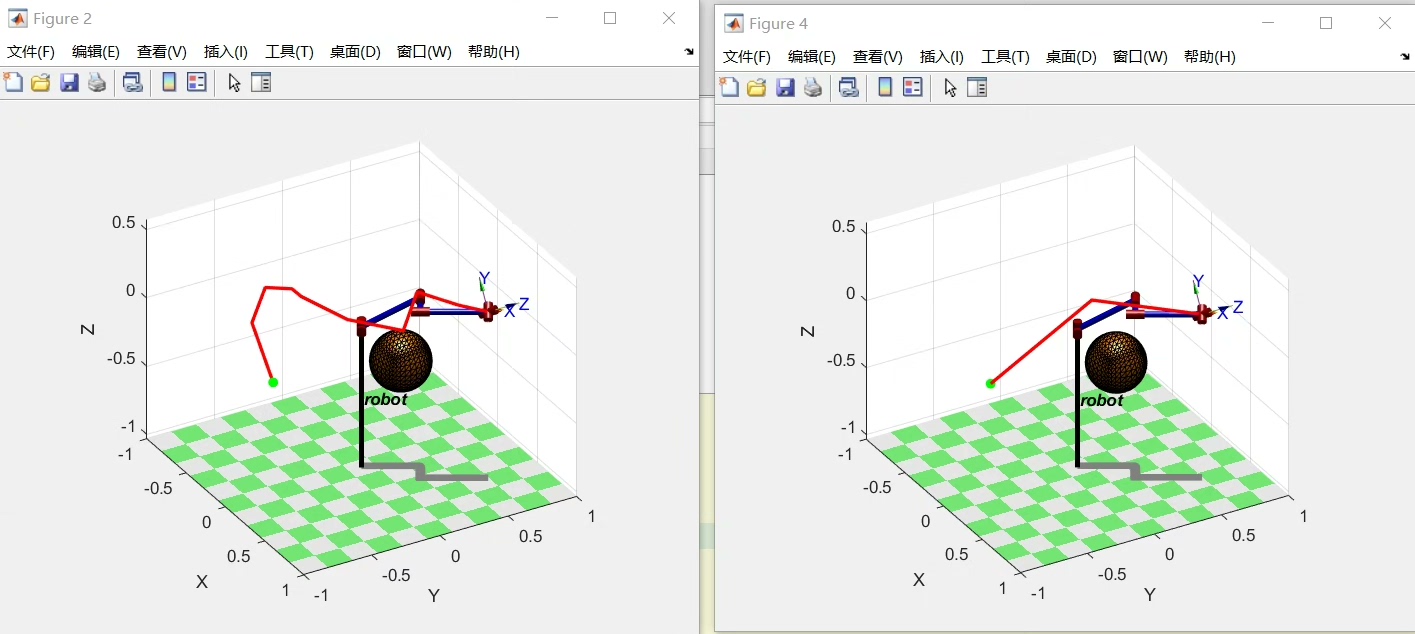
机械臂在三维空间玩躲猫猫有多难?RRT算法家族表示这题能解。咱们今天不整虚的,直接上Matlab撸代码,用球体障碍物当陪练,看看RRT、RRT-Connect、RRT、Informed RRT四个兄弟谁更会绕路。
先给机械臂整个活——D-H参数建模不能少。拿6自由度机械臂为例,用Matlab的robotics toolbox五分钟搭个架子:
L1 = Link('d', 0.2, 'a', 0, 'alpha', pi/2);
L2 = Link('d', 0, 'a', 0.5, 'alpha', 0);
% ...省略中间4个连杆参数
arm = SerialRobot([L1 L2 L3 L4 L5 L6], 'name', '六轴机械臂');障碍物生成简单粗暴,直接撒一堆球体。碰撞检测用距离判断就行,但要注意连杆扫过的空间:
function collision = checkCollision(q_new, obstacles)
[pos, ~] = arm.fkine(q_new); % 正向运动学
for i = 1:size(obstacles,1)
if norm(pos(1:3) - obstacles(i,1:3)) < obstacles(i,4)*1.2
collision = true;
return;
end
end
collision = false;
end经典RRT先上阵,效果就像喝醉的扫地机器人。核心代码就三个步骤:撒点、找邻居、长树枝:
while iter < max_iter
q_rand = rand(1,6)*2*pi - pi; % 6维随机位姿
[q_near, idx] = findNearest(q_rand, tree);
q_new = steer(q_near, q_rand, step_size);
if ~checkEdge(q_near, q_new, obstacles)
tree.addEdge(q_near, q_new);
if norm(q_new - q_goal) < goal_threshold
path = extractPath(tree);
break;
end
end
end这算法在三维空间里容易走成贪吃蛇,路径弯弯绕绕不说,成功率还看脸。这时候RRT-Connect掏出双枪——前后两棵树对着长:
tree_start.init(q_start);
tree_goal.init(q_goal);
while iter < max_iter
if connect(tree_start, tree_goal) % 双向奔赴
path = mergePaths();
return;
end
[tree_start, tree_goal] = swapTrees(tree_start, tree_goal); % 交换生长方向
end实测发现这货比单棵树快三倍,但生成路径还是像心电图。于是RRT*带着优化光环登场,关键在rewire操作:
function tree = rewire(tree, q_new)
neighbors = findNearNeighbors(q_new, tree);
for q_near = neighbors
new_cost = cost(q_new) + norm(q_new - q_near);
if new_cost < cost(q_near)
tree.setParent(q_near, q_new); % 换爹操作
end
end
end这波操作让路径逐渐收敛到最优,代价是每次迭代都要遍历邻居节点。最后出场的Informed RRT*掏出椭圆采样大杀器:
if current_best < inf
c_min = norm(q_start - q_goal);
C = rotationToEllipse(c_min, current_best); % 生成椭圆采样区域
q_rand = sampleEllipse(C); % 椭圆内采样
end实测这个版本在复杂障碍环境里收敛速度提升明显,特别是当初始路径找到后,采样范围从整个空间缩到椭圆区域,相当于给算法开了导航。
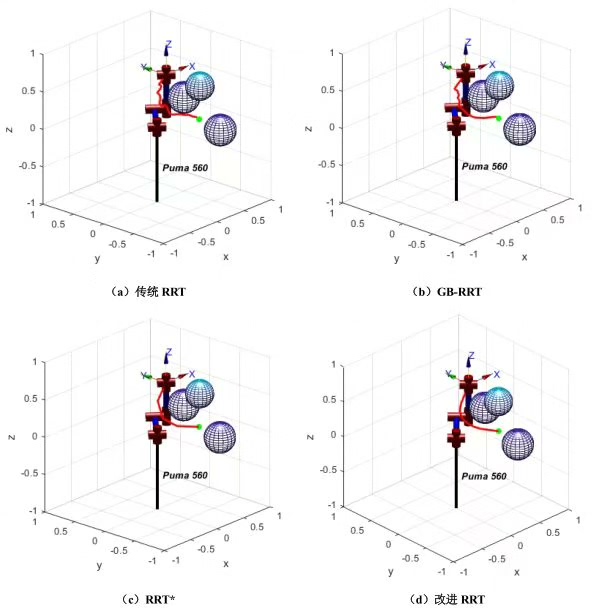
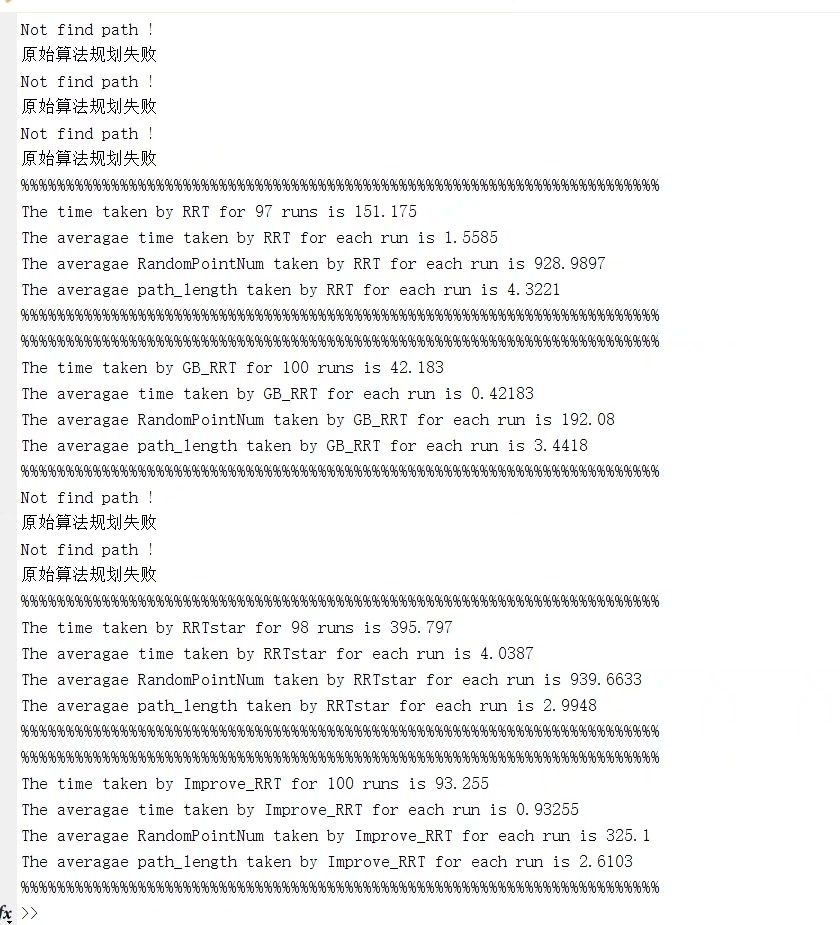
跑完四个算法,拿同一组障碍物测试(图1)。RRT花5秒找到一条扭成麻花的路径;RRT-Connect 2秒找到差不多的麻花;RRT 15秒磨出相对顺滑的路线;Informed RRT前10秒和RRT*一样慢,但15秒后突然开窍,路径长度缩短20%。
最后奉上避坑指南:
- 碰撞检测别直接用位姿点,要检查连杆轨迹(代码里偷懒了)
- 6维空间里步长别超过0.2弧度,否则容易穿模
- Informed RRT*的椭圆旋转矩阵计算容易翻车,建议用四元数转换
Matlab仿真有个隐藏彩蛋——用animatedline函数实时显示搜索过程,看着树枝在障碍之间钻来钻去,比看进度条有意思多了。源码已扔GitHub,调参时记得备好枸杞,三维路径规划这玩意,玄学起来能让你怀疑人生。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)