基于A*算法的无人机三维路径规划:MATLAB实现与动态避障探索
基于A* 算法的无人机三维路径规划算法,可以动态避障,自己可以规定设计障碍物位置,MATLAB编程实现在无人机应用日益广泛的今天,路径规划成为关键技术之一。其中,A算法以其高效寻优特性,在路径规划领域备受青睐。本文将探讨如何基于A算法实现无人机的三维路径规划,并实现动态避障功能,采用MATLAB进行编程实现。
基于A* 算法的无人机三维路径规划算法,可以动态避障,自己可以规定设计障碍物位置,MATLAB编程实现
在无人机应用日益广泛的今天,路径规划成为关键技术之一。其中,A算法以其高效寻优特性,在路径规划领域备受青睐。本文将探讨如何基于A算法实现无人机的三维路径规划,并实现动态避障功能,采用MATLAB进行编程实现。
A*算法基础
A*算法是一种启发式搜索算法,结合了Dijkstra算法的广度优先搜索策略和贪心算法的最佳优先搜索策略。其核心在于通过评估函数$f(n) = g(n) + h(n)$来选择下一个扩展节点。这里,$g(n)$是从起点到节点$n$的实际代价,$h(n)$是从节点$n$到目标点的估计代价。在三维路径规划中,$g(n)$可以根据欧几里得距离等方式计算节点间移动代价,$h(n)$常采用曼哈顿距离或欧几里得距离作为到目标点的估计。
动态避障与障碍物设计
在实际应用场景中,无人机需要动态避开障碍物。我们可以自行规定障碍物位置,例如设定在三维空间中的特定区域内存在障碍物。假设我们将障碍物定义为一些立方体区域,通过设定其中心坐标和边长来确定其位置和大小。
MATLAB编程实现
初始化环境
% 定义三维空间大小
x_max = 100;
y_max = 100;
z_max = 100;
% 定义起点和目标点
start = [10, 10, 10];
goal = [90, 90, 90];
% 定义障碍物(这里以简单的立方体为例)
obstacle1 = [50, 50, 50, 20]; % [中心x, 中心y, 中心z, 边长]在上述代码中,我们首先设定了三维空间的范围,然后确定了无人机的起点和目标点坐标。接着,定义了一个简单的立方体障碍物,其中心位于(50, 50, 50),边长为20。
构建A*算法核心部分
function [path, cost] = astar_3d(start, goal, obstacles, x_max, y_max, z_max)
% 初始化开放列表和关闭列表
open_list = [];
closed_list = [];
% 将起点加入开放列表
start_node = struct('pos', start, 'g', 0, 'h', norm(start - goal), 'parent', []);
open_list = [open_list; start_node];
while ~isempty(open_list)
% 找到开放列表中f值最小的节点
[~, min_index] = min([open_list.g] + [open_list.h]);
current = open_list(min_index);
open_list(min_index) = [];
% 检查是否到达目标点
if all(current.pos == goal)
path = [];
while ~isempty(current.parent)
path = [current.pos; path];
current = current.parent;
end
path = [start; path];
cost = current.g;
return
end
% 扩展当前节点
neighbors = get_neighbors(current.pos, x_max, y_max, z_max, obstacles);
for i = 1:size(neighbors, 1)
neighbor = struct('pos', neighbors(i, :), 'g', current.g + 1, 'h', norm(neighbors(i, :) - goal), 'parent', current);
in_closed = any(arrayfun(@(x) all(x.pos == neighbor.pos), closed_list));
if in_closed
continue
end
in_open = any(arrayfun(@(x) all(x.pos == neighbor.pos), open_list));
if in_open
open_index = find(arrayfun(@(x) all(x.pos == neighbor.pos), open_list));
if open_list(open_index).g > neighbor.g
open_list(open_index) = neighbor;
end
else
open_list = [open_list; neighbor];
end
end
% 将当前节点加入关闭列表
closed_list = [closed_list; current];
end
% 如果没有找到路径
path = [];
cost = Inf;
end这段代码实现了A*算法的核心逻辑。在函数中,首先初始化开放列表和关闭列表,将起点加入开放列表。然后在循环中,不断从开放列表中选取$f$值最小的节点进行扩展。对于扩展出的邻居节点,检查其是否在关闭列表中,如果在则跳过;如果在开放列表中且新的$g$值更小,则更新开放列表中的节点;否则将其加入开放列表。当找到目标点时,通过回溯父节点构建路径。
获取邻居节点函数
function neighbors = get_neighbors(pos, x_max, y_max, z_max, obstacles)
neighbors = [];
directions = [-1, 0, 0; 1, 0, 0; 0, -1, 0; 0, 1, 0; 0, 0, -1; 0, 0, 1];
for i = 1:size(directions, 1)
new_pos = pos + directions(i, :);
if new_pos(1) >= 1 && new_pos(1) <= x_max && new_pos(2) >= 1 && new_pos(2) <= y_max && new_pos(3) >= 1 && new_pos(3) <= z_max
is_obstacle = false;
for j = 1:size(obstacles, 1)
obstacle_center = obstacles(j, 1:3);
obstacle_size = obstacles(j, 4);
if new_pos(1) >= obstacle_center(1) - obstacle_size/2 && new_pos(1) <= obstacle_center(1) + obstacle_size/2 &&...
new_pos(2) >= obstacle_center(2) - obstacle_size/2 && new_pos(2) <= obstacle_center(2) + obstacle_size/2 &&...
new_pos(3) >= obstacle_center(3) - obstacle_size/2 && new_pos(3) <= obstacle_center(3) + obstacle_size/2
is_obstacle = true;
break;
end
end
if ~is_obstacle
neighbors = [neighbors; new_pos];
end
end
end
end此函数用于获取当前节点的邻居节点。通过定义六个方向(上下左右前后)来生成可能的邻居位置,然后检查这些位置是否在空间范围内且不在障碍物内,如果满足条件则将其作为邻居节点返回。
调用算法并可视化
[path, cost] = astar_3d(start, goal, [obstacle1], x_max, y_max, z_max);
% 可视化路径和障碍物
figure;
hold on;
% 绘制障碍物
for i = 1:size([obstacle1], 1)
obstacle = [obstacle1];
obstacle_center = obstacle(i, 1:3);
obstacle_size = obstacle(i, 4);
xlim([0, x_max]);
ylim([0, y_max]);
zlim([0, z_max]);
rectangle3('Position', [obstacle_center(1)-obstacle_size/2, obstacle_center(2)-obstacle_size/2, obstacle_center(3)-obstacle_size/2, obstacle_size, obstacle_size, obstacle_size], 'FaceColor', 'r');
end
% 绘制路径
if ~isempty(path)
plot3(path(:, 1), path(:, 2), path(:, 3), 'b', 'LineWidth', 2);
end
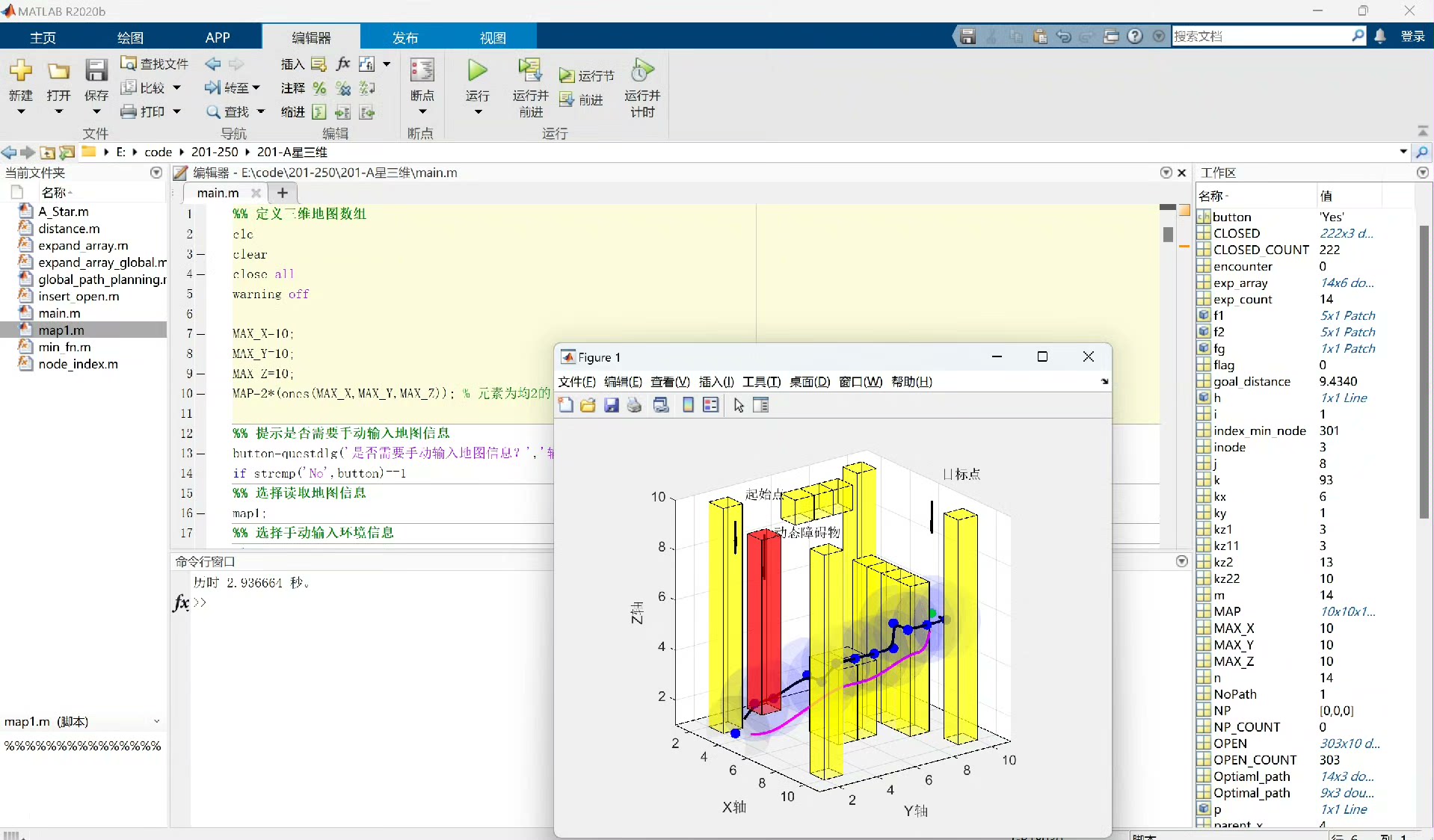
hold off;最后这部分代码调用之前实现的A*算法函数,获取路径和代价。并使用MATLAB的绘图功能,将障碍物以红色立方体表示,规划出的路径以蓝色线条绘制出来,直观展示路径规划结果。
通过以上步骤,我们基于A*算法在MATLAB中成功实现了无人机的三维路径规划及动态避障功能。在实际应用中,还可根据具体需求进一步优化算法和扩展功能,比如考虑更复杂的障碍物形状、动态更新障碍物位置等。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 4
4 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)