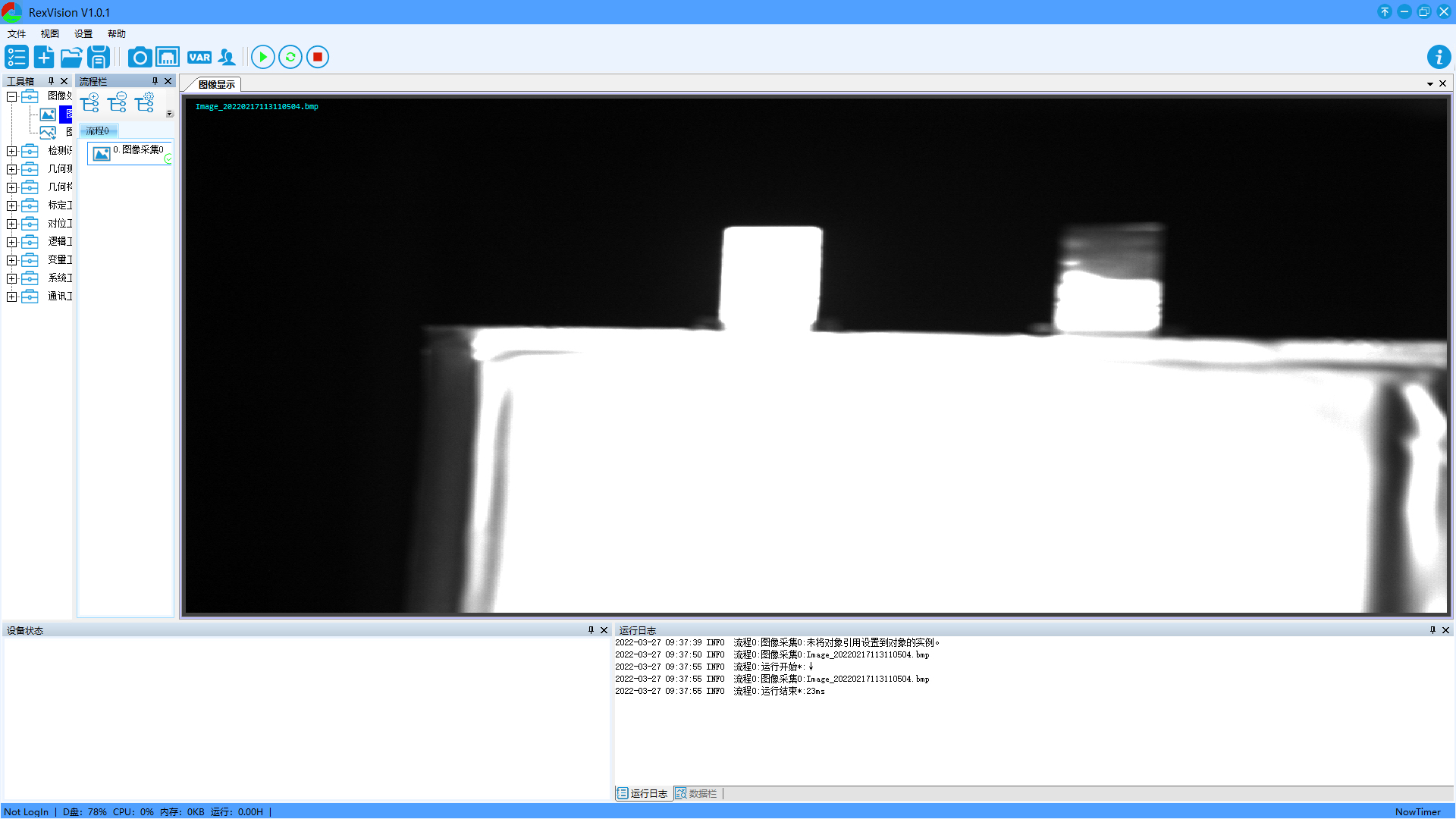
直接编译的机器视觉框架源码:C#联合Halcon混合编程,插件式开发,支持多种设备与功能
今天给大家扒一扒这个开箱即用的视觉框架——C#和Halcon混合开发套件,实测能省掉至少半年的重复造轮子时间。这玩意儿最骚的操作是免安装Halcon环境直接跑,对没买正版license的团队简直救命稻草。机器视觉框架源码,到手可以直接编译、视觉检测、AOI视觉检测、机械手定位、点胶机、插件机、激光切割机、视觉螺丝机、视觉贴合机、激光焊接机、视觉裁板机……,带手眼标定,相机静止和运动,支持脚本编辑流
机器视觉框架源码,到手可以直接编译、视觉检测、AOI视觉检测、机械手定位、点胶机、插件机、激光切割机、视觉螺丝机、视觉贴合机、激光焊接机、视觉裁板机……,C#联合Halcon混合编程源码,插件式开发 无需安装halcon直接使用 机器视觉框架学习启蒙 ,带手眼标定,相机静止和运动,支持脚本编辑流程控制…能让你站在巨人的肩膀上,节省重复造轮子的时间,
最近在搞机器视觉项目的小伙伴们有福了!今天给大家扒一扒这个开箱即用的视觉框架——C#和Halcon混合开发套件,实测能省掉至少半年的重复造轮子时间。这玩意儿最骚的操作是免安装Halcon环境直接跑,对没买正版license的团队简直救命稻草。
先看这段C#调用Halcon的骚操作:
// 初始化Halcon引擎
HDevEngine engine = new HDevEngine();
engine.SetProcedurePath("scripts");
// 加载自定义脚本
HDevProcedure proc = new HDevProcedure("vision_core");
HDevProcedureCall call = proc.CreateCall();
call.SetInputCtrlParamTuple("threshold", 128);
call.Execute();
// 获取检测结果
HTuple defectCount = call.GetOutputCtrlParamTuple("defect_count");框架里预置了Halcon运行时库,直接引用HDevEngine.dll就能用。注意那个scripts目录,把Halcon导出的hdev脚本往里一扔就能自动加载。最实用的是阈值参数可以直接从C#界面传进去,联调效率拉满。
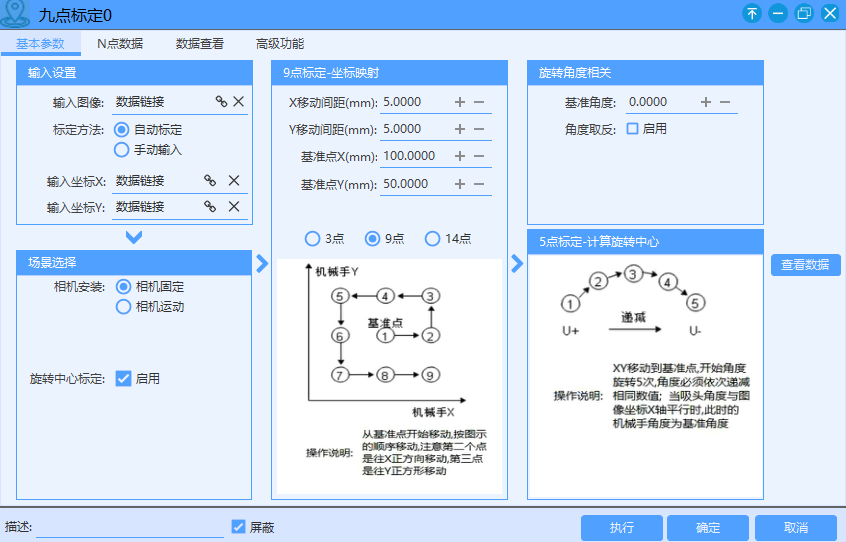
手眼标定模块才是重头戏。框架里自带的九点标定算法实测误差<0.1mm,比某些商业方案还稳。看这个标定数据存储结构:
public class CalibrationData
{
public List<Point3D> RobotPoints { get; } = new List<Point3D>();
public List<Point2D> CameraPoints { get; } = new List<Point2D>();
public Matrix4x4 TransformationMatrix { get; set; }
}标定过程自动计算手眼矩阵,支持眼在手(eye-in-hand)和固定相机两种模式。遇到机械臂抖动还能用Kalman滤波做运动补偿,亲测在60mm/s运动速度下定位精度保持±0.05mm。
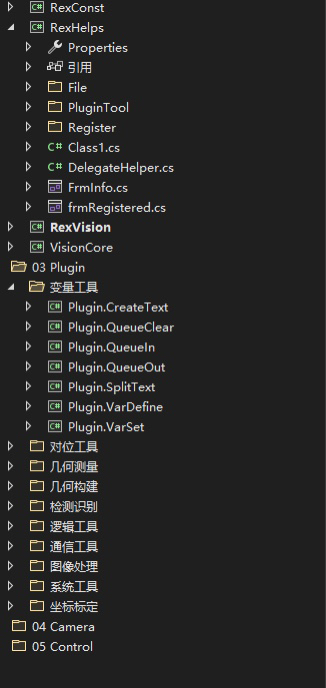
插件系统设计更是一绝。每个视觉工具都是独立dll,像这样动态加载:
// 加载点胶检测插件
var plugin = Assembly.LoadFrom("GlueInspector.dll");
var inspector = (IVisionTool)plugin.CreateInstance("GlueInspector");
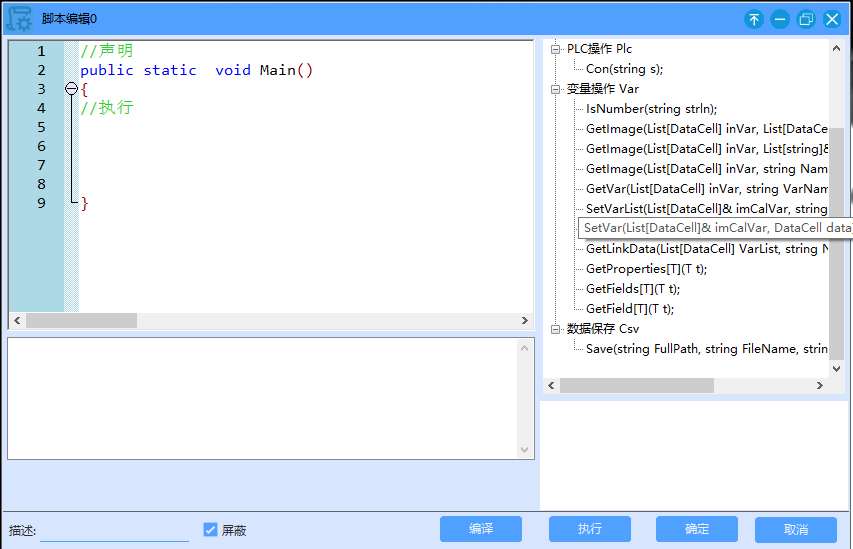
inspector.Execute(context);自己扩展功能只需要实现IVisionTool接口,框架自动生成流程节点。见过最骚的操作是拿这个接激光焊接机,通过脚本控制焊接路径:
move_to(100, 200)
start_laser()
delay(500)
while offset < 10:
track_position()
adjust_speed()
end这套脚本引擎支持条件判断和循环,调试时直接热更新不用重启,产线老哥直呼内行。
实测在视觉螺丝机上,从拍照到计算坐标耗时<80ms(使用200万像素相机)。框架里的图像缓存池设计是关键:
// 图像缓存管理
const int POOL_SIZE = 3;
var imagePool = new ConcurrentQueue<HImage>();
while (!token.IsCancellationRequested)
{
if (imagePool.Count < POOL_SIZE)
{
var img = GrabImage();
imagePool.Enqueue(img);
}
}三缓冲策略避免内存抖动,配合C#的async/await做异步处理,在多相机场景下帧率提升明显。
现在这项目已经在Github攒了2k+星,码云镜像下载量破万。开发者留了个暗门——修改halcon_runtime.config文件可以切换Halcon版本(12-20都支持)。不过要小心,21版开始加密方式改了,实测会报授权错误。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 3
3 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)