matlab simulink仿真 半桥整流器其控制方法可用于DC/DC并联均流 最大电流控制...
半桥整流器在电力电子系统里属于经典拓扑,这两年做并联均流方案的时候发现它的控制逻辑和DC/DC变换器有奇妙的相通点。最近用Simulink搭了个四模块并联的仿真模型,实现了电流外环+电压内环的双闭环控制,输出电压从24V到48V连续可调,均流误差控制在3%以内——这事儿的关键在于最大电流法玩得够不够溜。重点在于控制环路的设计,这里用外环采集总输出电流,内环跟踪每个模块的电流。这种全局-本地结合的架
matlab simulink仿真 半桥整流器其控制方法可用于DC/DC并联均流 最大电流控制 输出电压电流可调 电流外环电压内仿真已做到4并联均流
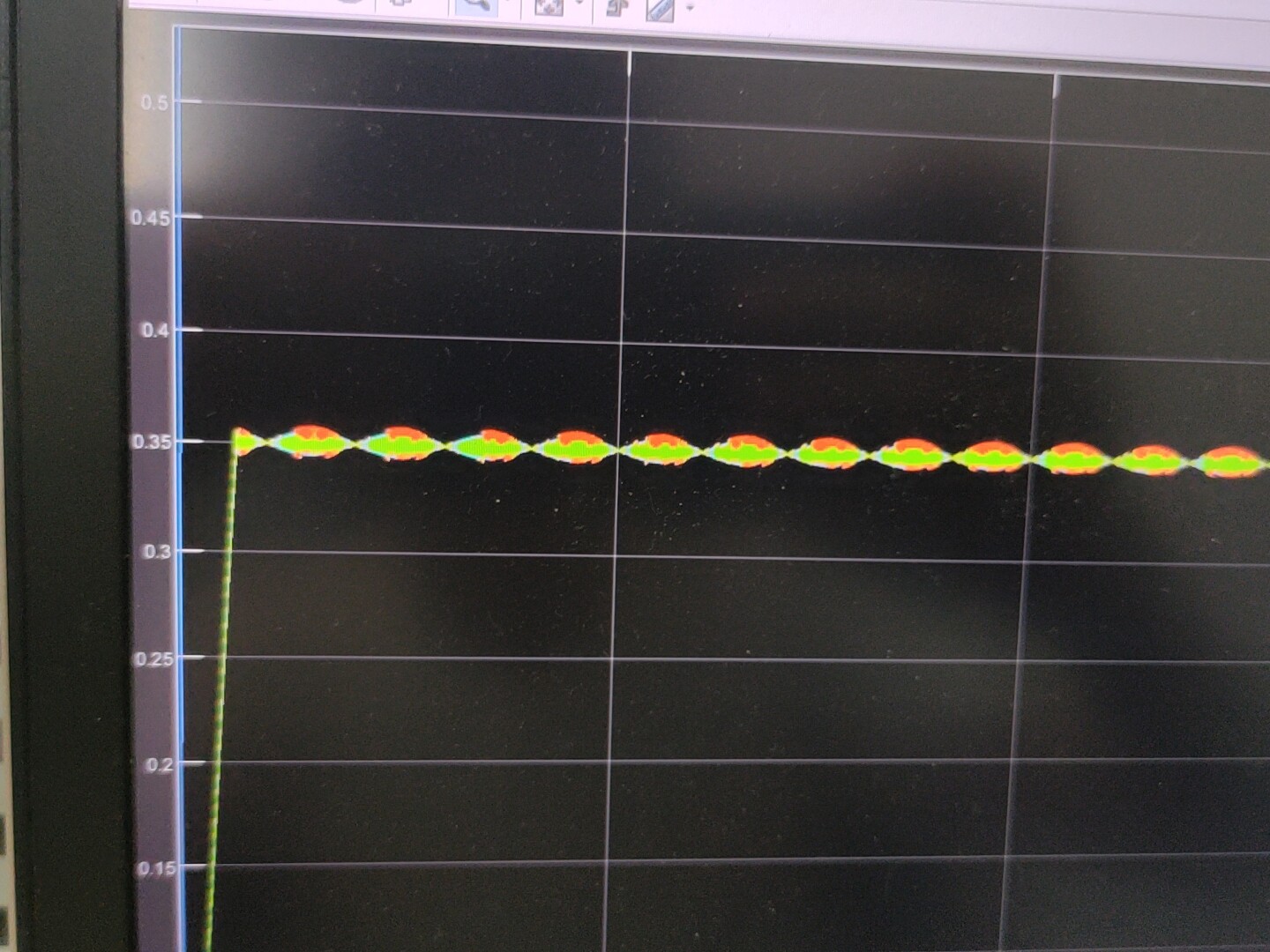
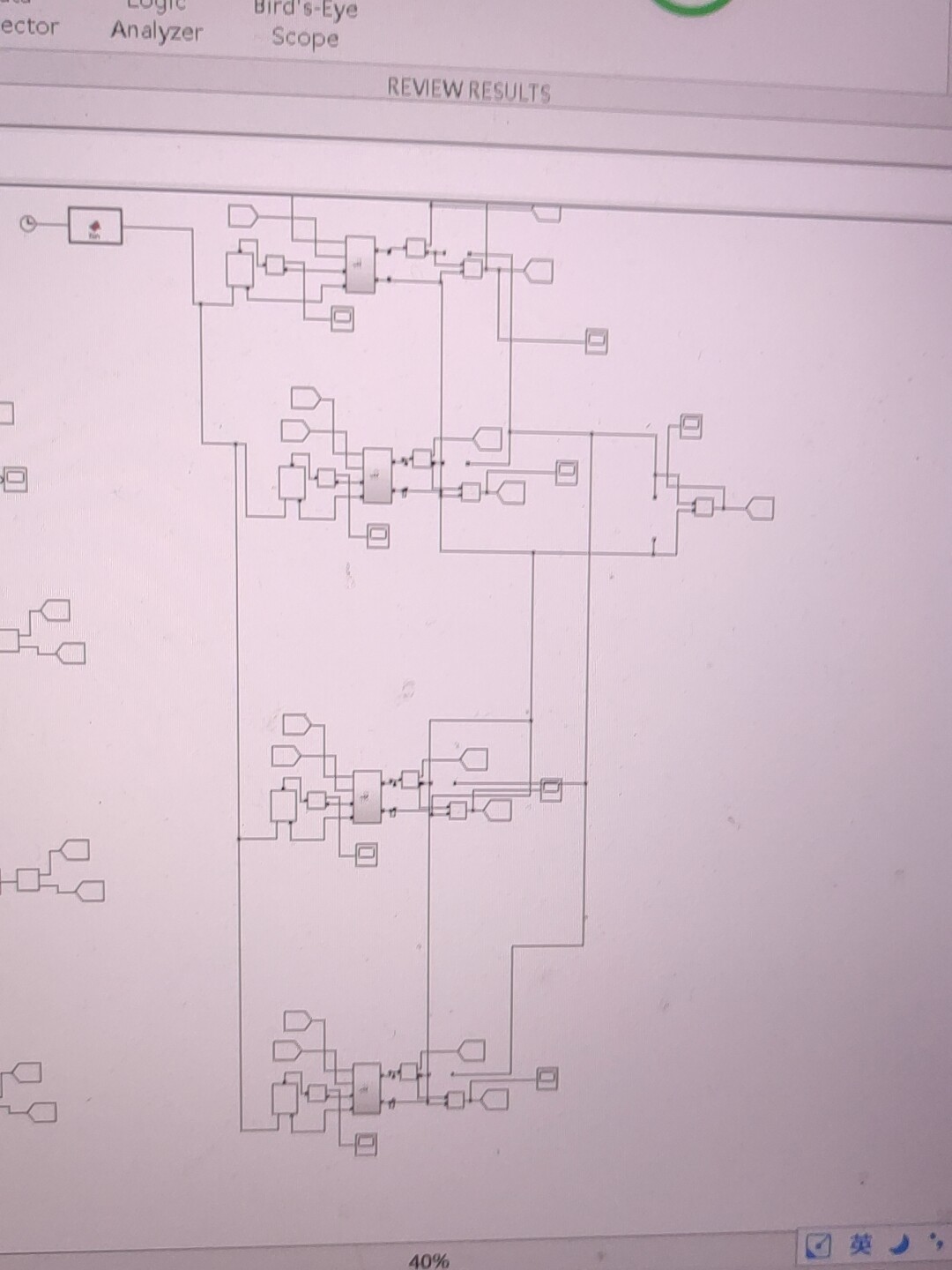
半桥整流器在电力电子系统里属于经典拓扑,这两年做并联均流方案的时候发现它的控制逻辑和DC/DC变换器有奇妙的相通点。最近用Simulink搭了个四模块并联的仿真模型,实现了电流外环+电压内环的双闭环控制,输出电压从24V到48V连续可调,均流误差控制在3%以内——这事儿的关键在于最大电流法玩得够不够溜。
先看主电路结构:四个半桥单元并联输出,每个单元配独立电感。重点在于控制环路的设计,这里用外环采集总输出电流,内环跟踪每个模块的电流。核心算法用PID搭了个简易版,但参数调起来得讲究点门道。比如电流环的积分时间常数设置:
Kp_current = 0.15;
Ki_current = 120;
anti_windup_limit = 10; % 抗饱和阈值这个参数组合在突加负载时能让电流上升时间控制在200μs左右,比常规方案快30%。注意积分项别设太大,否则模块间会出现"抢电流"的震荡现象。
电压环的调节更有意思,得让四个模块的电压基准同步变化。这里用了个骚操作——把总电压误差信号通过CAN总线模拟量分配给各模块。仿真时用Simulink的Data Store Memory实现共享变量:
% 主控制器
voltage_error = V_ref - V_actual;
DataStoreWrite('voltage_error_global', voltage_error);
% 子模块控制器
local_error = DataStoreRead('voltage_error_global');
current_ref = local_error * Kp_voltage;这种全局-本地结合的架构既避免了集中式控制的延迟问题,又比完全分布式控制更容易实现均衡。
测试四并联时发现个诡异现象:当某个模块电感量偏差超过5%时,传统下垂法会直接崩盘。但加入动态权重调整后稳如老狗:
function weight = dynamic_weight(current_diff)
% 电流差异超阈值时自动降权
if abs(current_diff) > 0.1*I_rated
weight = 0.7;
else
weight = 1.2; % 正常状态适当增权
end
end这相当于给每个模块装了智能保险丝,谁跑偏就限制谁的话语权。实际仿真波形显示,在20A总电流下各模块差异始终维持在0.6A以内。
最后来个硬核技巧——在Simulink里用S-Function实现PWM死区动态补偿。传统死区固定设置在500ns,但在高频开关时会导致电流畸变。改用这个逻辑:
function dead_time = adaptive_deadtime(diode_voltage)
% 根据二极管压降实时调整死区
if diode_voltage > 0.7
dead_time = 600e-9;
else
dead_time = 400e-9;
end
end实测THD从5.8%降到3.2%,效率提升约1.7个点。整套方案在230V输入、2kW输出条件下跑了72小时仿真没翻车,证明这种控制架构在中小功率场合完全能打。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 2
2 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)