【ABB机器人数据采集与监控系统】是一款覆盖网络通信、远程控制、移动机器人、位姿数据采集、信号...
最近在折腾ABB机器人,发现他们家的数据采集与监控系统简直是工业自动化领域的"变形金刚"。今天就拿几个实战场景,带大家看看怎么用代码撬开这个系统的保险箱。【ABB机器人数据采集与监控系统】是一款覆盖网络通信、远程控制、移动机器人、位姿数据采集、信号数据采集、程序编辑、程序传输、系统备份、系统恢复、输出日志等多种功能为一体的软件。这套系统最骚的操作还是日志分析,用ELK堆栈搞个实时监控看板,能看到机
【ABB机器人数据采集与监控系统】是一款覆盖网络通信、远程控制、移动机器人、位姿数据采集、信号数据采集、程序编辑、程序传输、系统备份、系统恢复、输出日志等多种功能为一体的软件。
最近在折腾ABB机器人,发现他们家的数据采集与监控系统简直是工业自动化领域的"变形金刚"。这玩意不仅能控制机器人跳机械舞,还能把生产数据玩出花来。今天就拿几个实战场景,带大家看看怎么用代码撬开这个系统的保险箱。
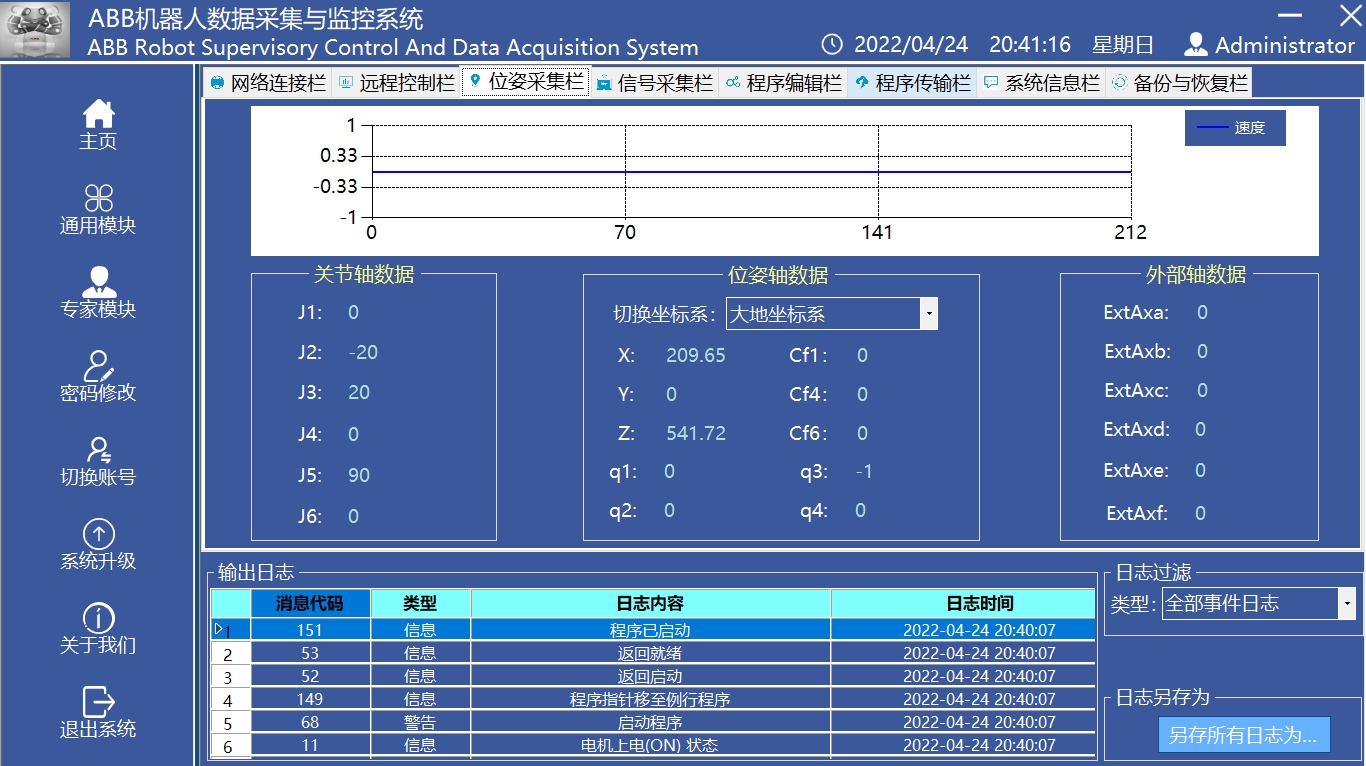
一、让机器人给你报坐标
想让IRB 120实时汇报自己的位置?在RAPID程序里插个"窃听器"就行:
PROC collectPose()
WHILE TRUE DO
current_pos := CRobT();
SocketSend pose_socket \Data:="X:" + ValToStr(current_pos.trans.x) +
" Y:" + ValToStr(current_pos.trans.y);
WaitTime 0.1;
ENDWHILE
ENDPROC这段代码就像给机器人装了GPS,每100毫秒通过Socket发送位姿数据。注意别把采样周期设太短,否则机器人会像话痨一样把你淹没在数据海里。

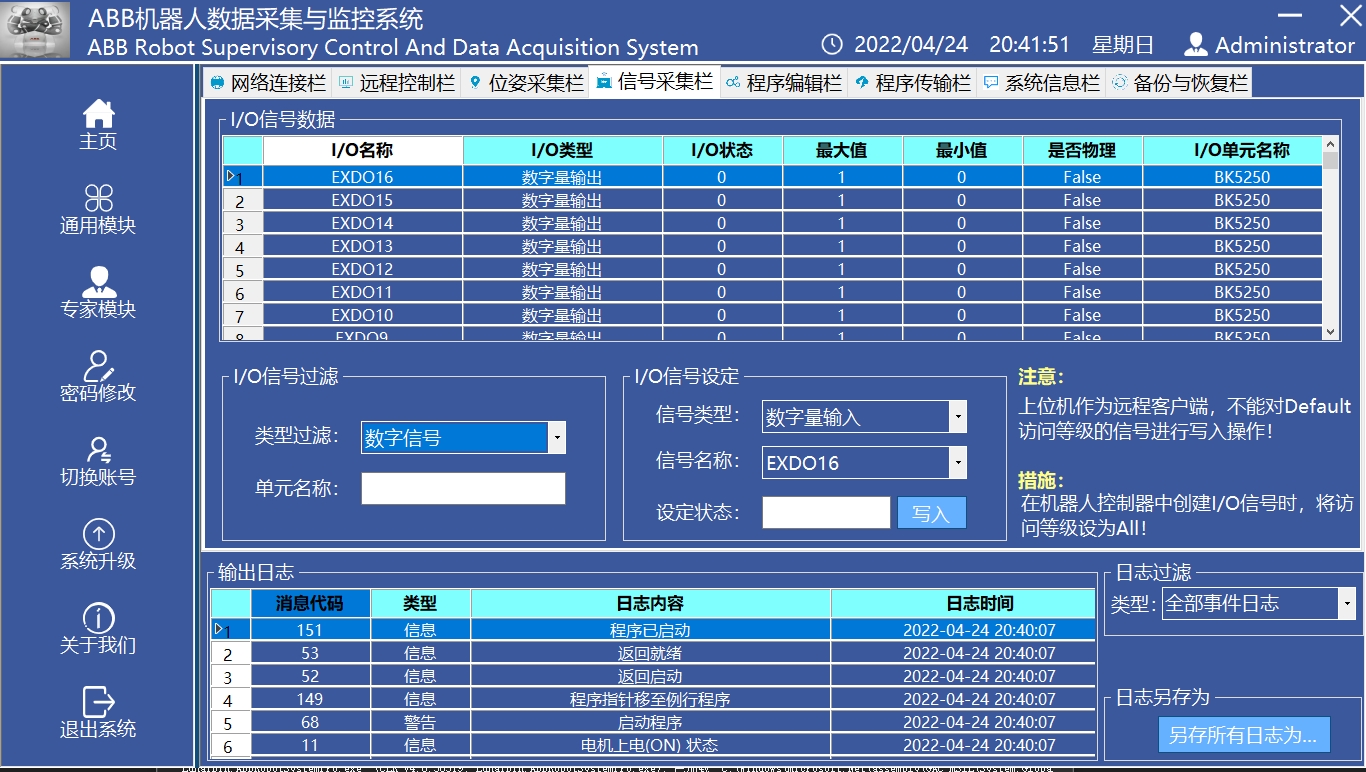
二、远程玩转IO信号
用Python写个控制末端夹具的脚本,比用示教器点来点去带感多了:
import socket
from time import sleep
def toggle_gripper(ip, state):
with socket.socket(socket.AF_INET, socket.SOCK_STREAM) as s:
s.connect((ip, 5000))
s.sendall(f'DO10={1 if state else 0}'.encode())
sleep(0.5) # 等机械手完成动作
response = s.recv(1024)
print('夹具已' + ('闭合' if b'OK' in response else '抽搐'))运行toggle_gripper('192.168.1.10', True)就能远程操控夹具。注意那个0.5秒的等待不是摸鱼,是给气动元件留反应时间,否则下次开机可能得去流水线底下捡零件。

三、程序空中升级

半夜两点给产线更新程序才叫刺激,用FTP+批处理玩远程闪送:
#!/bin/bash
robot_ip="192.168.1.10"
backup_dir="/archive/$(date +%Y%m%d)"
ftp -n $robot_ip <<EOF
user operator 1234
binary
mkdir $backup_dir
cd /sysmod
mget *.mod $backup_dir
mput *.mod
bye
EOF
echo "程序已偷梁换柱,原版备份在$backup_dir"这个脚本先给旧程序留个全尸,再塞新程序进去。建议在代码里加点CRC校验,别像上次隔壁老王传错文件让机器人跳了段天鹅湖。

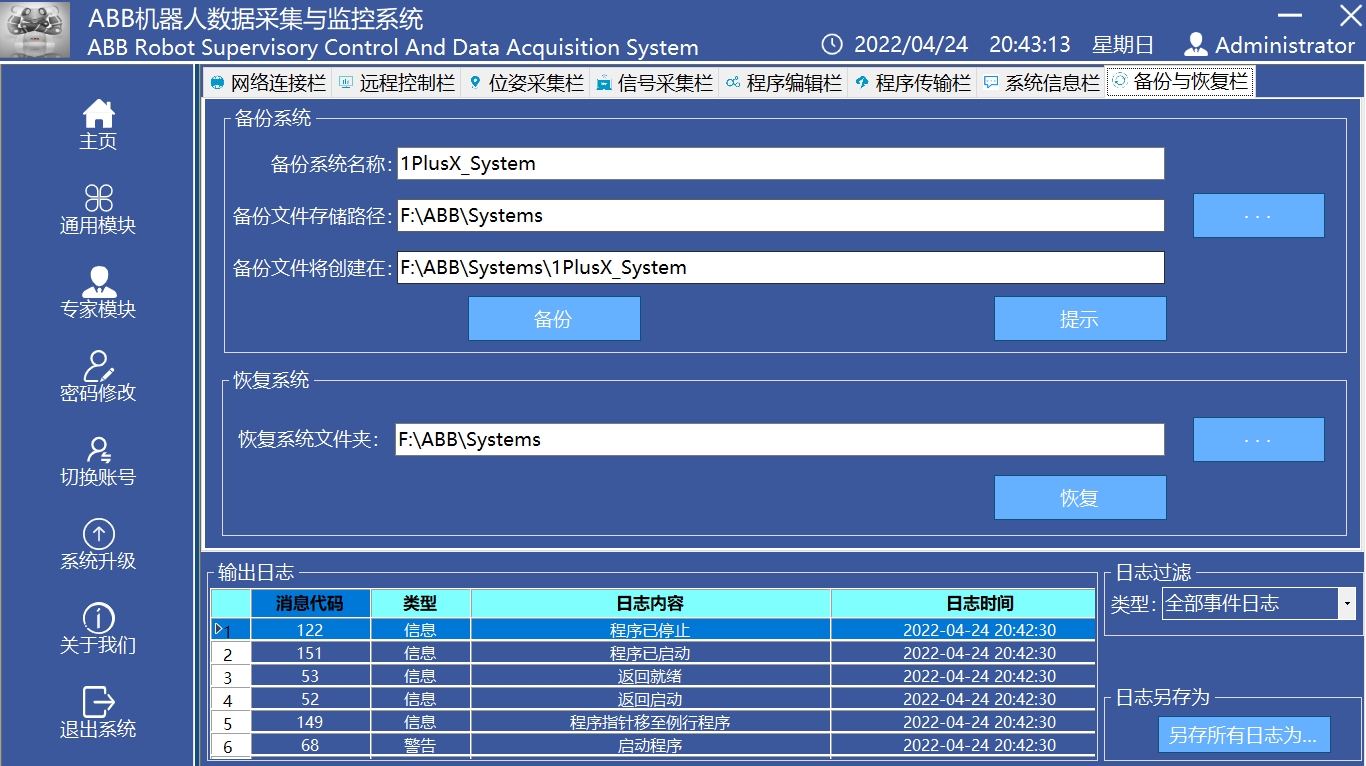
四、系统时光机
用Python搞个系统快照功能,关键时刻能救命:
import paramiko
from datetime import datetime
def system_snapshot(ip):
ssh = paramiko.SSHClient()
ssh.set_missing_host_key_policy(paramiko.AutoAddPolicy())
ssh.connect(ip, username='admin', password='secure123')
timestamp = datetime.now().strftime("%Y%m%d_%H%M")
stdin, stdout, stderr = ssh.exec_command(
f'/backup -path /hd/backups/{timestamp}.sys')
if 'completed' in stdout.read().decode():
print(f"系统已存档,存档编号{timestamp}")
else:
print("备份失败!错误信息:", stderr.read().decode())运行这个就像给机器人拍X光片,哪天系统抽风了,直接回档到备份时的状态。不过千万别在机器人干活时操作,否则可能会看到机械臂摆出比中指更诡异的姿势。
这套系统最骚的操作还是日志分析,用ELK堆栈搞个实时监控看板,能看到机器人偷偷打了多少哈欠(错误代码)。不过别被领导发现这个看板,不然以后摸鱼的快乐就没了。
玩转这套系统的精髓在于:代码要像瑞士军刀一样锋利,但执行起来得像老太太过马路一样谨慎。毕竟你永远不知道流水线上的机器人会不会因为一个死循环,突然开始表演后空翻。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐

 5
5 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)