非GNSS无人机RGB图像卫星图像视觉定位python
与GNSS设备相比,RGB摄像头和卫星图像的获取成本相对较低,且RGB图像数据处理设备普及,适用范围广泛。未来,如何将RGB图像、卫星图像、激光雷达(LiDAR)、惯性测量单元(IMU)等多种传感器的数据进行有效融合,是提升无人机定位精度的关键。的前沿技术,不仅可以为你带来强有力的实验支持,还能让你的论文站在技术的最前沿,探索无人机智能导航的新视野!RGB图像的质量在不同的光照条件下可能会发生较大
🚁 非GNSS无人机视觉定位:RGB图像与卫星图像如何引领无人机导航新时代? 🌍
🔥 告别传统GNSS导航:视觉定位成未来趋势! 🔥
X00238-非GNSS无人机RGB图像卫星图像视觉定位python
在无人机的应用领域中,全球导航卫星系统(GNSS)一直是定位的主力军。但在复杂的城市环境、室内或森林等GNSS信号弱的地方,传统的GNSS系统往往失去作用,甚至可能出现信号丢失的情况。这时候,视觉定位技术,尤其是基于RGB图像和卫星图像的融合技术,成为了无人机导航的关键技术突破!
对于老师和学生,特别是正在进行论文实验的研究者,掌握非GNSS无人机视觉定位的前沿技术,不仅可以为你带来强有力的实验支持,还能让你的论文站在技术的最前沿,探索无人机智能导航的新视野!
🌟 视觉定位:告别GNSS的束缚,解锁精准导航! 🌟
1. 非GNSS无人机视觉定位的核心原理 🧠
传统GNSS依赖卫星信号,但其受到天气、环境、建筑物遮挡等因素的影响较大。而视觉定位技术通过摄像头捕捉到的RGB图像,结合已有的卫星图像,利用图像处理和计算机视觉算法,来实现高精度定位和姿态估计。
-
RGB图像定位: 无人机通过搭载RGB摄像头拍摄周围环境的图像,利用图像的特征点、纹理、颜色等信息,通过特征匹配和几何计算来推算无人机的位置和姿态。
-
卫星图像定位: 通过利用高分辨率卫星图像,结合图像地理标记信息进行地图匹配,达到精确的空间定位。在低GNSS信号环境下,结合卫星图像与RGB图像融合,可以进一步提高定位精度。
2. 视觉定位的技术优势:精准高效,跨越传统限制! 💡
-
无需依赖GNSS信号: 无论是城市峡谷还是密林深处,视觉定位都能提供强有力的支持,弥补GNSS定位的不足,尤其在GPS信号丢失或弱化的环境下。
-
多模态融合: 结合RGB图像和卫星图像的视觉信息,利用图像配准和特征匹配算法,可以在较大的区域内实现高精度定位,有效解决单一传感器的局限性。
-
低成本、易部署: 与GNSS设备相比,RGB摄像头和卫星图像的获取成本相对较低,且RGB图像数据处理设备普及,适用范围广泛。对于无人机的应用研究,降低了成本,提高了实验效率。
3. 如何将视觉定位技术应用于论文实验? 📚
对于正在撰写论文的老师和学生来说,非GNSS视觉定位技术不仅是一个研究方向,更是实验操作中值得关注的核心技术。以下是一些关键步骤,助你快速上手并完成高质量的论文实验:
-
数据采集与预处理: 首先,通过无人机搭载RGB摄像头采集飞行过程中的图像数据,并获取卫星图像。在数据采集过程中,确保不同场景下的图像数据尽可能多样化,包含不同的地理特征和环境光照变化。
-
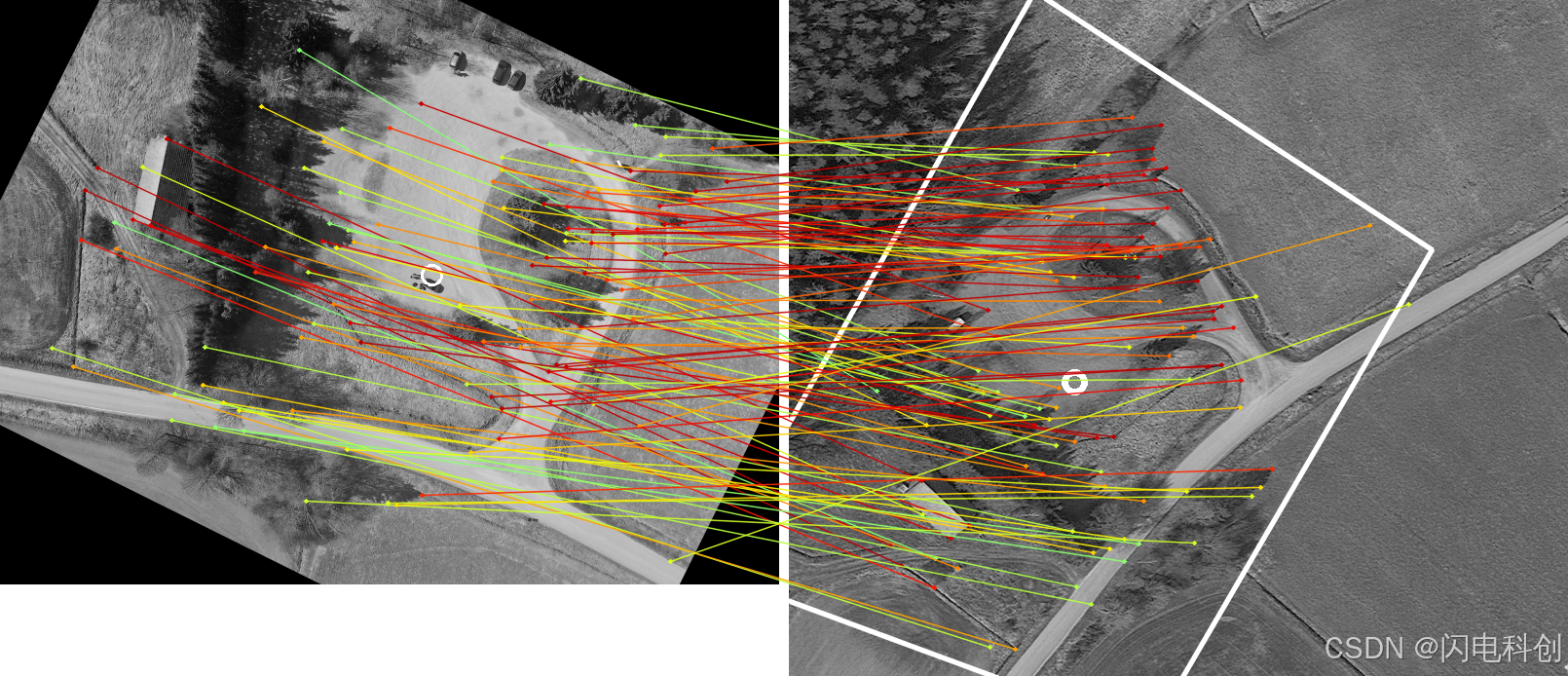
特征提取与匹配: 使用计算机视觉中的特征提取算法(如SIFT、ORB等),从RGB图像中提取特征点,并通过图像匹配技术将其与预先获取的卫星图像进行对比,确定无人机的相对位置。
-
姿态估计与位置推算: 基于图像中的特征点,通过PnP算法(Perspective-n-Point)或视觉SLAM技术来实现无人机的姿态估计和位置推算,进而实现精准的视觉导航。
-
误差分析与优化: 在实验中,通过多次测试和数据对比,进行误差分析,并优化视觉定位算法,提升系统的鲁棒性和定位精度。分析可能的影响因素,如图像分辨率、环境变化等。
-
论文写作与实验结果分析: 在撰写论文时,可以根据实验结果,讨论不同算法(如ORB-SLAM、DeepVO等)在不同环境下的性能表现,分析RGB图像与卫星图像融合对定位精度的提升。
4. 非GNSS视觉定位的前景与挑战 🚀
虽然视觉定位技术在很多应用场景中展示了巨大的潜力,但仍然面临一些技术挑战:
-
图像质量与光照变化: RGB图像的质量在不同的光照条件下可能会发生较大变化,这对定位算法的准确性提出了更高的要求。
-
计算资源需求: 图像处理和特征匹配算法在运行过程中对计算资源有较高的需求,特别是在实时定位过程中,如何高效地进行图像处理仍是一个挑战。
-
多传感器融合: 未来,如何将RGB图像、卫星图像、激光雷达(LiDAR)、惯性测量单元(IMU)等多种传感器的数据进行有效融合,是提升无人机定位精度的关键。

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐


 25
25 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)