检测概率和虚警概率_目标检测入门
1. 目标检测-任务概述分类 VS 检测分类问题:所属类别检测问题:所属类别 + 物体位置1.1 从分类到检测算法设为图片中的某个像素点,为其他位置,由可构成一个矩形框。穷举图片中所有可能的矩形框,每个子区域当成一张图片来做分类。 候选区域:每个所代表的矩形框,也被称为感兴趣区域(Region of Interest, ROI)。 1.2 目标检测的核心问题如何产生候选区域,并...
1. 目标检测-任务概述
分类 VS 检测
- 分类问题:所属类别
- 检测问题:所属类别 + 物体位置
1.1 从分类到检测算法
设
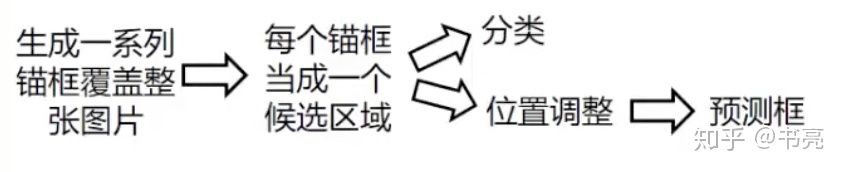
穷举图片中所有可能的矩形框

候选区域:每个
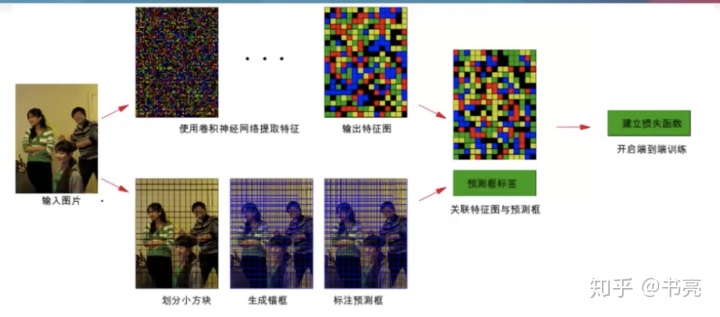
1.2 目标检测的核心问题
- 如何产生候选区域,并对它们进行标注;
- 如何提取图像特征,并将提取到的特征与候选区域的类别和位置进行关联。
1.3 目标检测算法
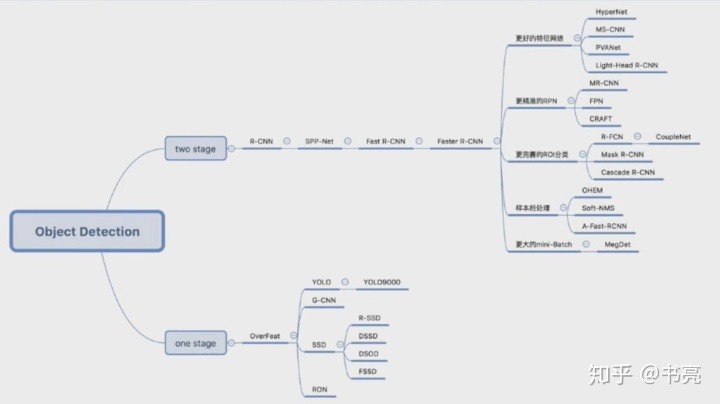
- 两阶段目标检测算法:特征提取 -> 生成 Region Proposal -> 分类 + 位置调整(bounding box regression)
典型算法: Faster-RCNN, Pyramid Network
- 单阶段目标检测算法:特征提取 -> 分类 + 位置调整(bounding box regression)
典型算法:SSD, YOLOv3,RetinaNet
2. 目标检测基础知识
边界框:正好能包含物体的矩形框,bounding box, bbox。
真实框:数据集标注中给出的目标物体对应的边界框, ground truth box, 简称 gt_box。
预测框:由模型预测出的可能包含目标物体的边界框,prediction box, 简称 pred_box。
检测任务输出:[L, P, x1, y1, x2, y2],L 是类别标签,P 是所属类别的概率。一张图片会有多个预测框。
锚框:以某种规则生成边界框,经过位置调整后成为预测框, anchors。
锚框的生成可参考程序:
书亮:generate_anchors.pyzhuanlan.zhihu.com锚框和真实框的重合程度可以用指标 IOU(Intersection of Union)来衡量。
3. 目标检测的指标
- TP (True Positive): 正确的正样本。即检测器找出了样本区域,正确的判断。
- FN (False Negative): 错误的负样本,即检测器把样本区域判定为背景,相当于『遗漏』。
- TN (True Negative): 正确的负样本。即检测器把背景判定为背景,正确的判断。
- FP (False Positive): 错误的正样本。即检测器把背景判定为样本区域,也叫『虚警』。
3.1 两个指标:
- Precision
Precision - 正确率,也即检测结果的正确率:
- Recall
Recall - 召回率,也即样本被检测出来的概率:
3.2 如何判断检测器的好坏?
对于检测算法,每个框的输出如下:
confidence 代表当前框是目标的置信度,
PR 曲线
调整
从积分的角度来看,PR 曲线下的面积就是检测器在各个
3.3 mAP
关于多类别检测器,考虑 mAP (mean Average Precision):
3.4 NMS
NMS(None Maximum Suppression),又名为非极大值抑制,是目标检测框架种的后处理模块,主要用于删除高度冗余的 bbox。
4. Faster-RCNN
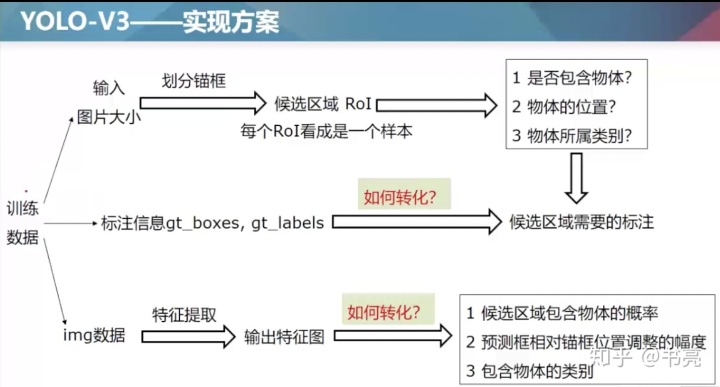
5. YOLOv3
5.1 实现方案
参考
- Paddle 深度学习应用公开课: https://www.bilibili.com/video/av83663267
- NMS: https://zhuanlan.zhihu.com/p/50126479

魔乐社区(Modelers.cn) 是一个中立、公益的人工智能社区,提供人工智能工具、模型、数据的托管、展示与应用协同服务,为人工智能开发及爱好者搭建开放的学习交流平台。社区通过理事会方式运作,由全产业链共同建设、共同运营、共同享有,推动国产AI生态繁荣发展。
更多推荐



 0
0 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)